 逆變器非線性在電機中產生的諧波及其補償方法
逆變器非線性在電機中產生的諧波及其補償方法
1.逆變器非線性
這里將逆變器非線性分為兩個部分來介紹。第一部分是管壓降帶來的非線性,第二部分是死區時間帶來非線性。
1.1 管壓降非線性
在逆變器中,各種器件并不是理想的特性。管壓降造成的非線性即開關器件的導通壓降和反向并聯二極管的導通壓降造成的輸出電壓與指令電壓不一致的情況。以A相橋臂為例進行分析。圖1是三相逆變器中A相橋臂輸出電流到電機繞組時的情況,定義此時電流為正方向。
在A相電流為正時,橋臂的導通有兩種情況,即A相橋臂上管導通( Sa =1)和上管關斷( Sa =0),分別如圖1(a)和圖1(b)所示。在圖1(a)中,上管導通( Sa =1),此時電流從電源正極端經過開關管流向繞組,經過開關管S1時壓降為 Vce 。
因此電流為正上管導通時a點電壓為Va0 = Vdc /2- Vce 。類似的,在圖1(b)中,上管關閉( Sa =0),此時電流從電源負極端經過反并聯二極管向繞組續流,經過S1旁二極管時壓降為- Vd 。因此上管關閉時a點電壓為Va0 =- Vdc /2- Vd 。
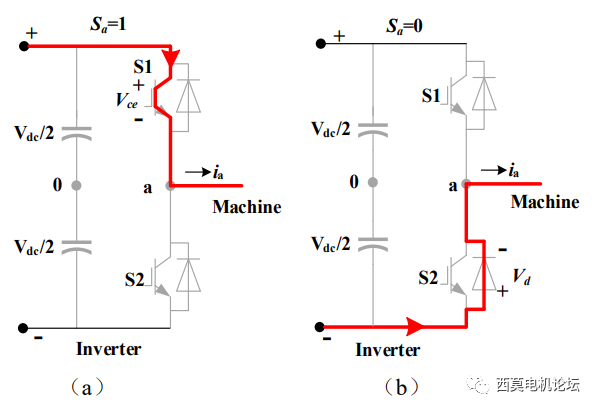
圖1 A相電流為正時的非線性分析
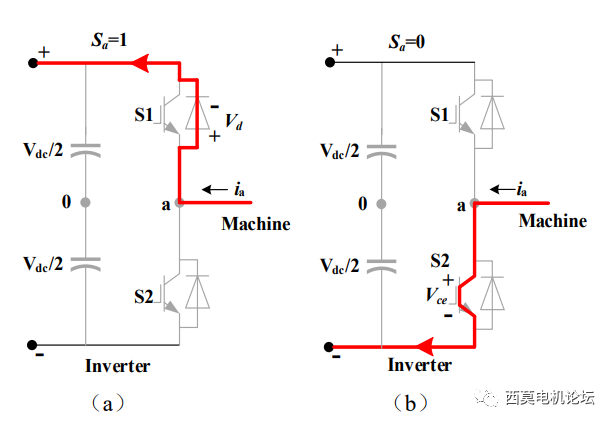
圖2 A相電流為負時的非線性分析
圖2是電流為負時的情況。與電流為正時的理論一致,可以得出當 Sa =1時,Va0 = Vdc /2+ Vd ;當 Sa =0時,Va0 =- Vdc /2+ Vce 。
總結以上四種情況,可以得到表1所示的A相端電壓的公式。
表1 逆變器非線性端電壓計算
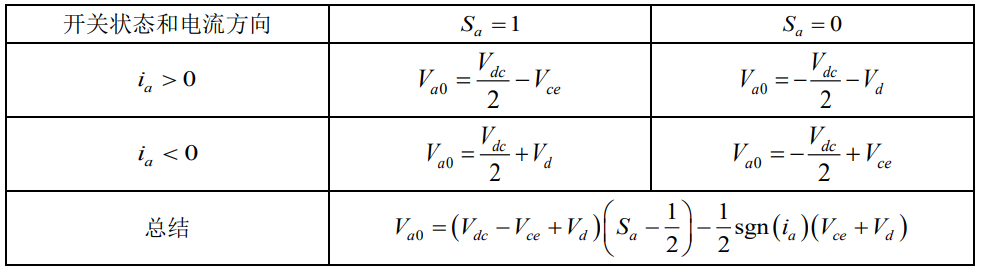
由于功率器件的管壓降中除了導通特性,還有一部分是電阻性壓降,因此,開關器件和二極管的壓降通常可以表示為
 (式1)
(式1)
其中,Vce0和Vd0是功率器件的閾值電壓,rce和rd是功率器件的等效電阻。
從而,A相端電壓可以表示為  (式2)
(式2)
需要注意的是,在表1的公式中,只考慮了管壓降造成的非線性。在下一節,將對死區時間造成的非線性進行討論。
1.2 死區時間非線性
圖3表示了在PWM調制過程中,參考導通時間和實際導通時間的關系。圖3(a)中是通過參考電壓計算出的參考導通時間。由于開關管并不是理想的開關器件,導通和關斷動作都有延遲。為了防止同一個橋臂的上下管同時導通,需要設置死區時間來避免同一橋臂上下管同時處于導通或者關閉過程,如圖3(b)所示,為了避免下管未完全關閉時上管導通或者上管未完全關閉時下管導通,所以設置死區時間Tdead來避免兩個開關管同時導通。
假設A相橋臂上管導通時間應該是 Ta_ref ,那經過死區時間調節后,導通時間變為了 Ta_ref - Tdead 。另外,將圖3(b)的PWM信號施加到開關管上時,正如前面所提到的,由于開關管的導通和關閉過程并不是理想的,導通和關斷的延遲時間分別為Ton和 Toff 。
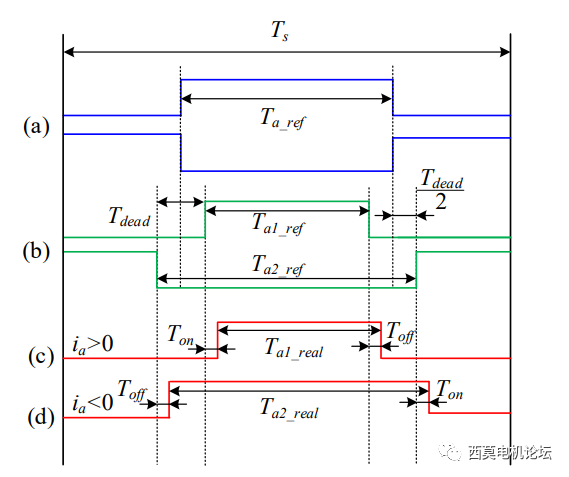
圖3 考慮死區時間的開關時序
最終,結合圖3(c)以及圖1(a)所示,當電流為正時,A相上管的實際導通時間為
 (式3)
(式3)
同理,結合圖3(c)以及圖2(b)所示,當電流為負時,A相下管的實際導通時間為
 (式4)
(式4)
綜上可得
 (式5)
(式5)
 (式6)
(式6)
另外,B相和C相的端電壓計算公式為
 (式7)
(式7)
 (式8)
(式8)
1.3 相電壓計算
前面分析了考慮管壓降和死區時間的非線性三相端電壓的計算。如圖所示,端電壓推導的是abc點到0點的電壓。但是在實際分析中,我們需要的是相電壓,即abc點分別到N點的電壓。因此,上一節的分析結果還需要進一步推導。
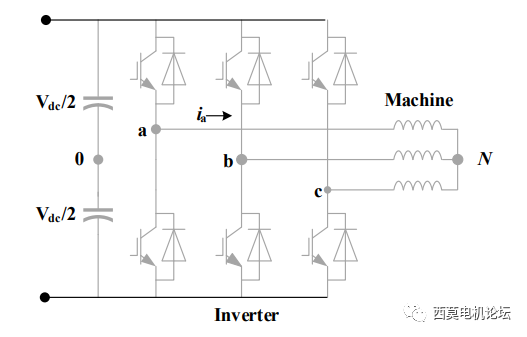
圖4 三相逆變器示意圖
根據圖4可知
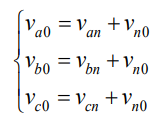
(式9)
而
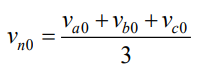
(式10)
聯立(式9)和(式10)可得三相電壓的計算公式為
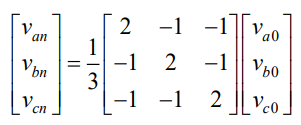 (式11)
(式11)
更進一步的,聯立(式6)、(式7)和(式11)可得非線性相電壓的表達式是
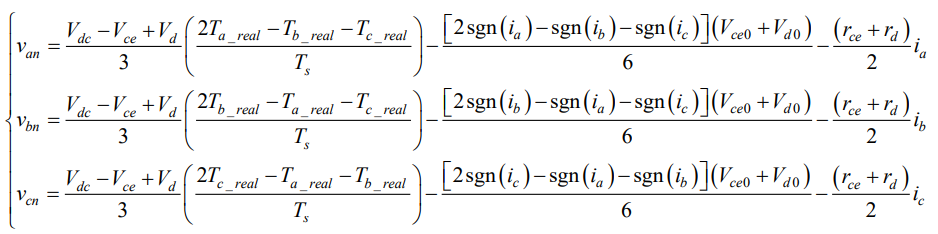 (式12)
(式12)
從(式11)也可以得到不考慮非線性的相電壓的表達式(理想相電壓)為
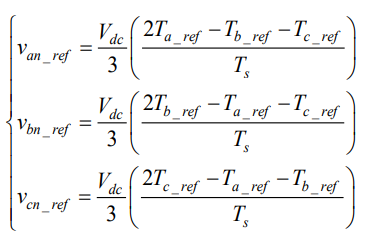
(式13)
以A相為例,聯立(式12)和式(13),可以得到功率器件管壓降和死區效應對相電壓造成的非線性誤差為
 (式14)
(式14)
其中  (式15)
(式15)
同理,B和C相也可以推導出來,總結三相非線性電壓誤差的表達式為
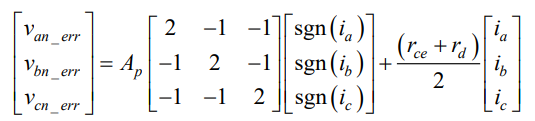 (式16)
(式16)
對(式16)進行Park變換,可以得到dq軸電壓的誤差公式。
 (式17)
(式17)
在開始下一節之前,需要解釋的是,這里沒有考慮直流母線電壓的測量誤差。如果考慮這一點,公式會變得更多更復雜,但是增加這部分分析對本文的主旨幫助不大。因此,為了簡化分析,假設母線電壓是準確的。
2.非線性補償
通過分析和推導,在上一章得到了非線性相電壓及其誤差、dq軸誤差電壓的表達式(式17)。根據式17,可得到如圖5為dq軸誤差電壓的示意圖。在一個電周期中,dq軸誤差電壓波動了6個周期。也就是說dq軸誤差電壓的頻率是基頻的6倍。旋轉坐標系中6倍頻的波動會在三相靜止坐標系中造成5/7次波動。或者說是三相電壓中的5/7次諧波表現在旋轉坐標系中是6倍頻的波動。如果有對這個結論不明白的讀者,可以在下一章多級旋轉坐標系理論中得到答案。
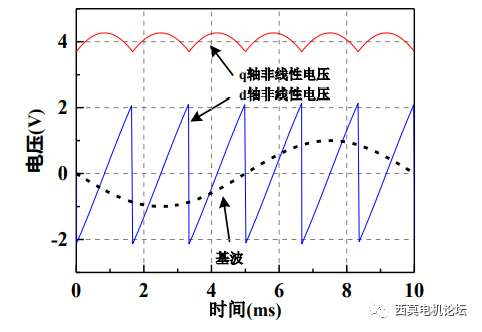
圖5 dq軸誤差電壓
如圖6(a)所示為非線性相電壓的波形,從相電壓波形中也可以明顯看到逆變器非線性對相電壓波形造成的影響。同時,對圖6(a)中的相電壓進行諧波分析,如圖6(b)所示。可見,5/7次諧波在相電壓中占主要因素,因此,逆變器非線性在相電流中帶來的諧波也是5/7次。
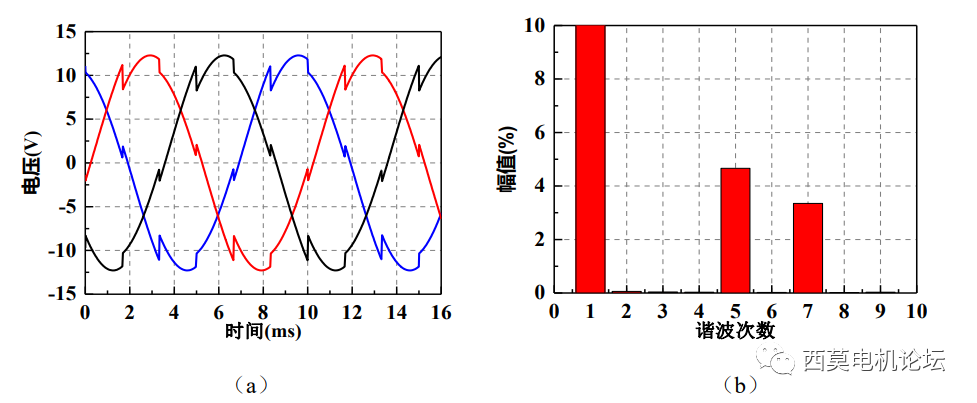
圖6 考慮逆變器非線性的相電壓波形(a)相電壓(b)諧波分析
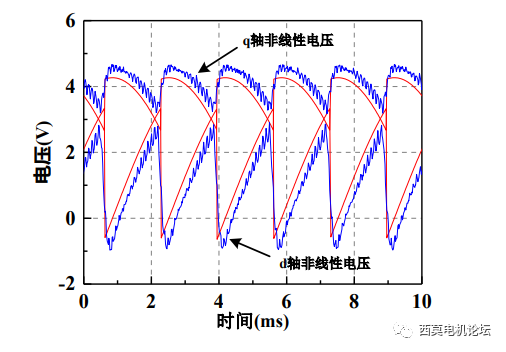
圖7 dq軸非線性電壓對比
如圖7為使用仿真得到的考慮非線性因素之后的相電流波形與之對應的諧波分析。可見兩者比較接近。
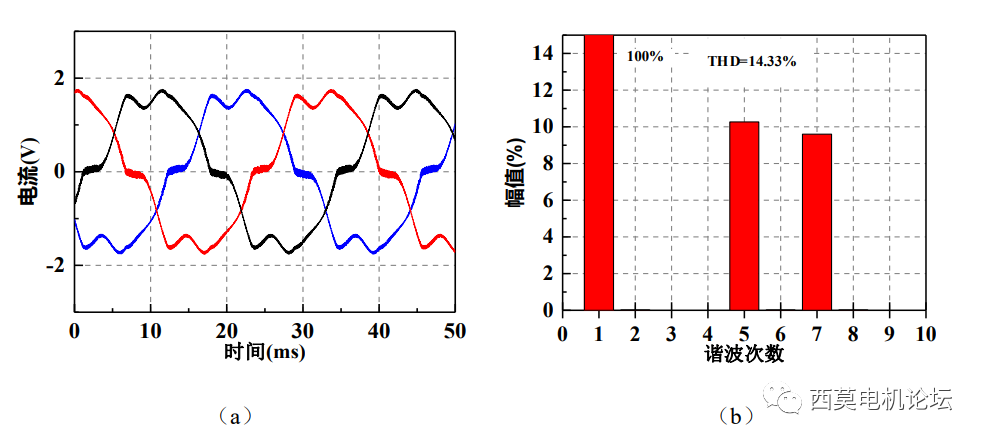
圖8 相電流及其諧波分析
如圖8為考慮逆變器非線性因素后的相電流波形及其諧波分析,可以看到,5/7次諧波是主要諧波分量。THD為14.33%。
針對逆變器非線性造成的低頻諧波,最直接的方法是利用前面推導得到的誤差電壓對指令電壓進行補償。圖9為非線性電壓補償的框圖。根據計算的非線性dq軸電壓,在電流環輸出的參考電壓后進行補償。
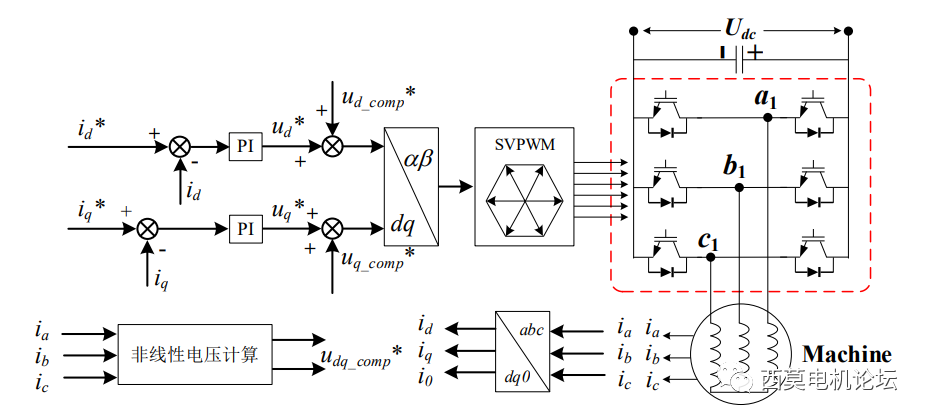
圖9 非線性電壓補償
圖10為對電壓進行補償前后,相電流及其諧波分析。在紅色點線時刻進行非線性電壓補償,補償之前,相電流的THD為14.33%,補償之后THD降為6.63%。可見非線性電壓補償具有明顯的電流諧波抑制效果。
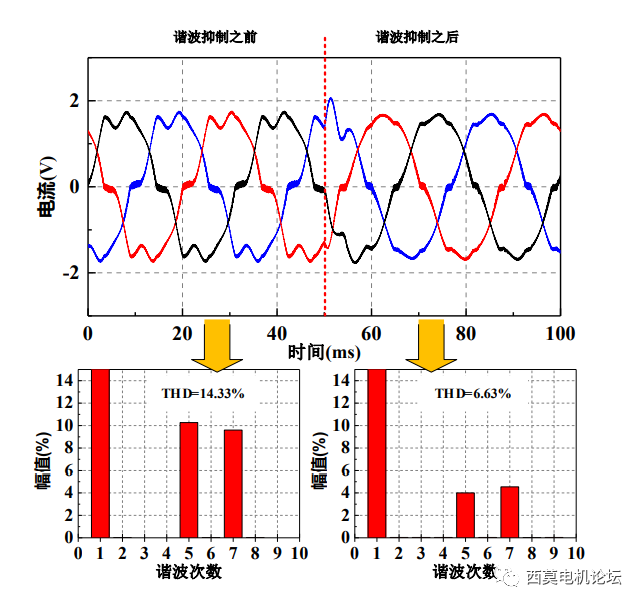
圖10 非線性電壓補償前后電流波形及其諧波分析
當諧波含量較少時,逆變器非線性補償可以將諧波抑制。但是在諧波含量較高的情況下,由于相電流在過零點處有抖動,造成計算出的非線性電壓誤差抖動增大。這部分抖動會在環路中對電流諧波造成一定影響,達不到補償非線性電壓的目的。
3.指定諧波次數抑制
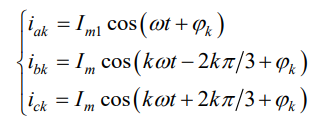
指定諧波次數抑制法是一種簡單有效的諧波抑制方法。三相電流的k次諧波表達式為:
 (18)
(18)
式中, iak 、 ibk 、ick分別表示三相對稱PMSM的ABC相的k次諧波電流;Im表示k次諧波電流的幅值;φk表示相對應的諧波電流的初始位置。
很明顯, iak 、 ibk 、ick三者之間的相序會隨著k取值的不同而不同:當k取值為 k =3 n +1( n =1,2…)時,iak超前ibk2π/3且滯后ick2π/3,相序和基波一樣,稱為正序諧波電流;當k取值為 k =3 n -1( n =1,2…)時,iak滯后ibk 2π/3且超前ick2π/3,相序和基波一樣,稱為負序諧波電流;當k取值為 k =3 n ( n =1,2…)時,iak 、 ibk 、ick幅值相等,相位一致,稱之為零序電流。以5/7次諧波為例進行分析。由前面分析可知:相電流中的5次諧波是負序的,7次諧波是正序的。此時,ABC三相電流可以表示為:
 (19)
(19)
式中,Im1表示基波幅值;Im5 、θ5表示5次諧波的幅值和初始時刻的相位;Im7 、θ7分別代表7次諧波的幅值和初始時刻的相位。
以5次諧波分量為例。從ABC坐標軸系下變換到5次d-q坐標軸系下的變換矩陣為:
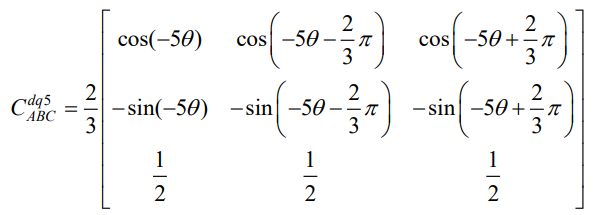 (20)
(20)
從5次到基波的dq變換矩陣為:
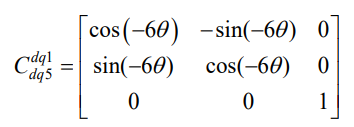 (21)
(21)
從基波到5次的dq矩陣為:
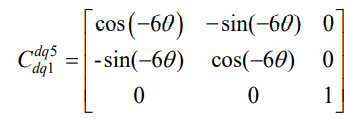 (22)
(22)
因此,在5次旋轉坐標系下,5次諧波電流的d-q分量以直流分量的形式呈現,基波和7次諧波以交流分量的形式呈現。
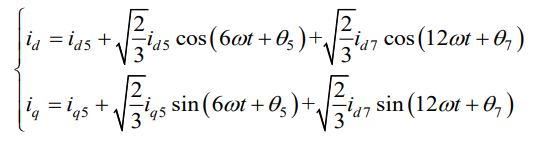 (23)
(23)
然后,對需要抑制的諧波分別建立電流環,并設置給定值為0。最后,將各個次數電流環產生的電壓信號在靜止坐標系中與基波相疊加,即可以達到對電壓進行補償,達到諧波抑制的效果。指定次數諧波抑制控制系統的框圖如圖11所示。諧波抑制模塊框圖如圖12所示,圖12以5次諧波為例。ABC三相電流首先經過5次dq變換,然后通過低通濾波器得到5次旋轉坐標系下的dq電流,再與給定值進行比較,從而調節該次諧波為0。變換后的電壓與基波電壓在靜止坐標系中疊加,作為補償電壓。
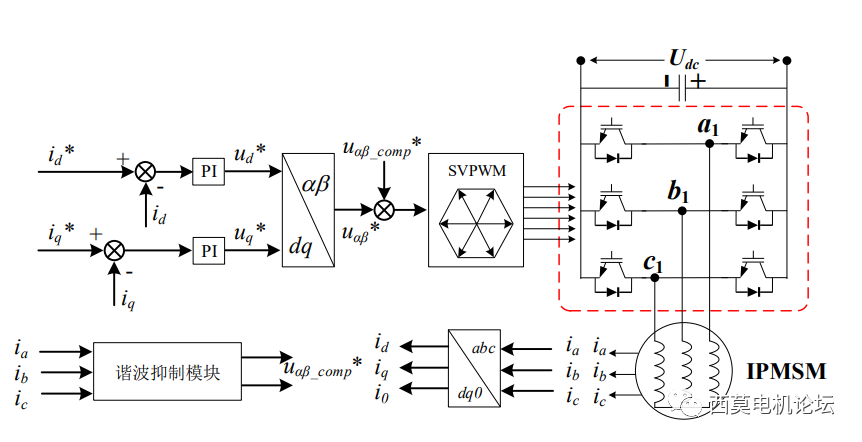
圖11 控制系統框圖
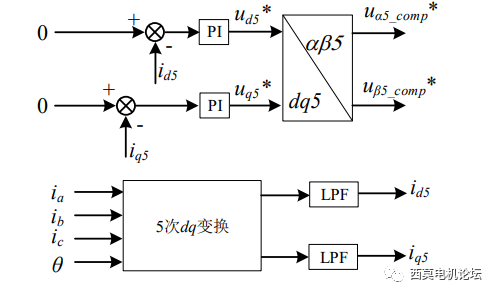
圖12 諧波抑制補償電壓計算
指定諧波抑制法介入控制系統前后電流波形如圖13所示。同樣的,在紅色點線時刻開始進行諧波抑制。諧波抑制之前,相電流的THD為14.33%,補償之后THD降為4.18%。可見非線性電壓補償具有明顯的電流諧波抑制效果。但是,由于低通濾波器的延遲效應,該方法需要幾個電周期來進行調整。
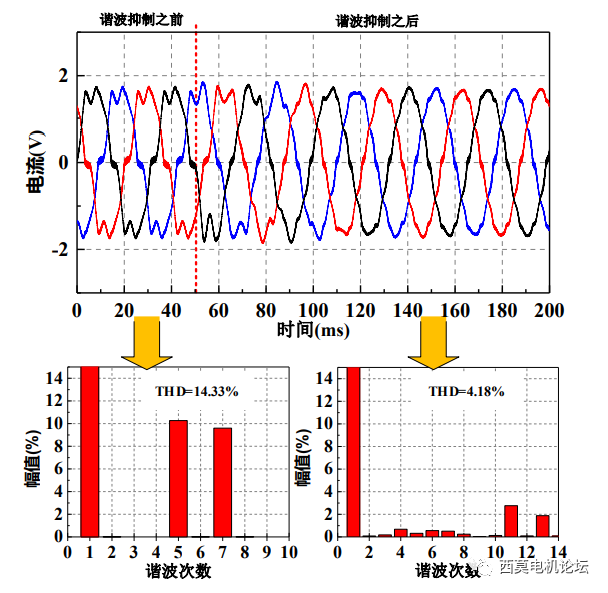
圖13 相電流及其諧波分析
4.比例-積分-諧振控制器
傳統的電流控制器使用PI控制器。由于直流信號中低頻分量占主要部分,因此PI控制器對于直流信號有較好的控制效果。通過前面的分析可知,逆變器非線性對于dq軸電壓造成的波動頻率為基頻的6倍。通常電機電流環的帶寬只有幾百Hz級別,6倍頻的情況下,dq軸電壓波動頻率會達到kHz以上。PI控制器對逆變器非線性帶來的波動是無能為力的。
在這種情況下,可以使用比例積分諧振(PIR)控制器。PIR控制器即在PI的基礎上并聯了一個諧振單元。諧振單元可以在dq軸電壓波動頻率處提供較大的增益,從而提高電流控制器對于交流信號的控制能力。PIR控制器的傳遞函數如下。
 (24)
(24)
式中,Kp是比例系數,Ki是積分系數,Kr是諧振系數,ωc是諧振帶寬,ω0是諧振頻率。
考慮永磁同步電機的等效傳遞函數為
 (25)
(25)
式中,Ls是定子電感,Rs是定子電阻。
則可以得到使用PI控制器和PIR控制器時的電流環開環傳遞函數分別為式(26)和式(27),考慮逆變器和采樣計算等造成的延遲時間為 Td 。
 (26)
(26)
 (27)
(27)
使用PI和PIR控制器時電流環開環傳函的頻率響應如圖14所示。其中紅色曲線為PIR控制下的bode圖,黑色為PI控制下的bode圖。從bode圖中可以看出PI的增益穿越頻率為100Hz,而PIR在100Hz處也穿越了0dB。但是,由于諧振單元的作用,PIR電流環的增益在180Hz(諧振頻率)增益顯著升高且保持了45度左右的相位裕度。與之對應的,PI電流環的增益在180Hz時已經為-6dB。圖15為PIR諧波抑制方法的控制框圖。
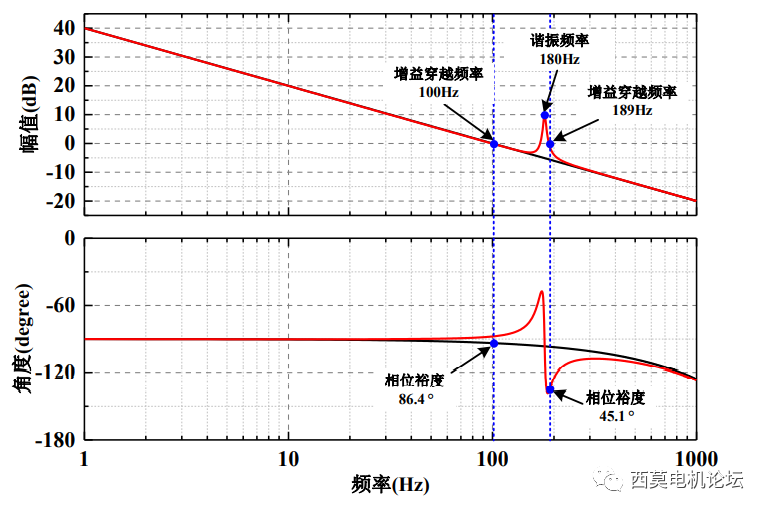
圖14 兩種控制器頻率響應對比
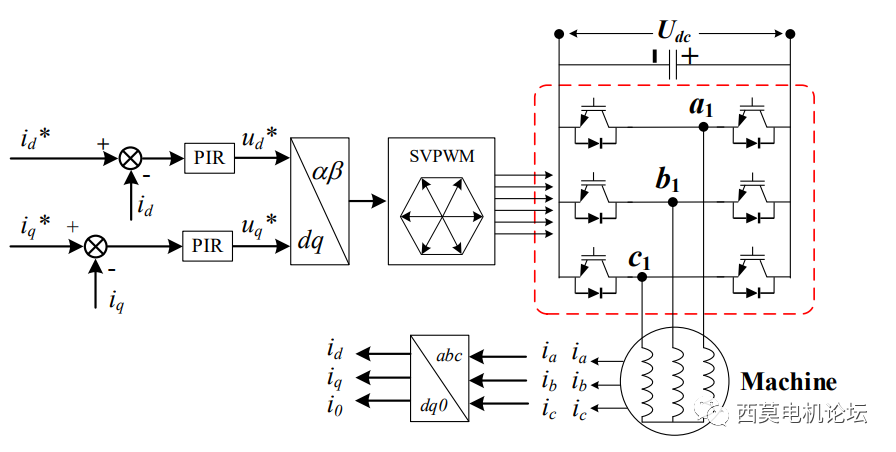
圖15 PIR諧波抑制框圖
比例積分諧振諧波抑制法介入控制系統前后電流波形如圖16所示。在紅色點線時刻開始進行諧波抑制。諧波抑制之前,相電流的THD為14.33%,補償之后THD降為4.53%。可見非線性電壓補償具有顯著的電流諧波抑制效果。但是,該方法參數設置較困難,容易在動態時出現系統不穩定的情況。
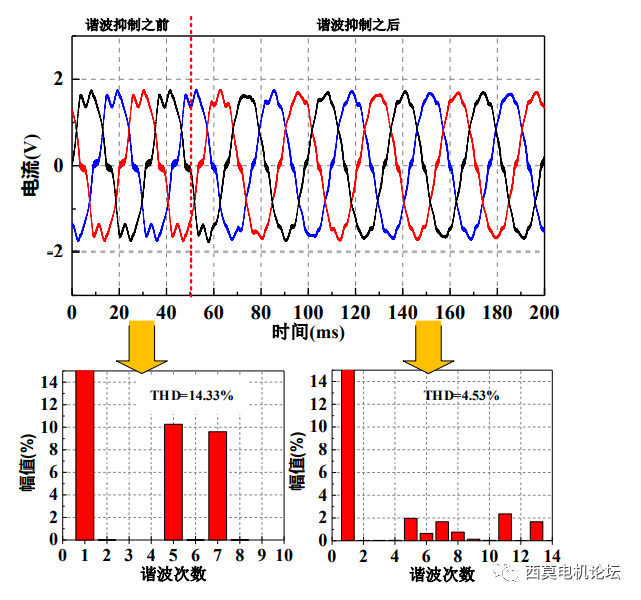
圖16 PIR諧波抑制框圖
-
低通濾波器
+關注
關注
14文章
474瀏覽量
47388 -
三相逆變器
+關注
關注
3文章
91瀏覽量
18868 -
電流諧波
+關注
關注
0文章
24瀏覽量
9233 -
相電壓
+關注
關注
4文章
69瀏覽量
14176 -
PWM調制
+關注
關注
0文章
34瀏覽量
6815
發布評論請先 登錄
相關推薦
電力系統諧波及濾波技術論文
有源器件系統中產生的非線性效應如何避免?
新能源汽車制造行業海文斯電氣無功補償和諧波治理解決方案

對醫院供配電系統諧波及其治理的分析研究
電壓諧波怎么產生的 電壓諧波標準值是多少
非線性負載產生諧波的原因及危害
非線性負載為什么會產生諧波?






 工商網監
工商網監
評論