 iCAN2023:應用TDK產品的優秀項目展示③:盲區偵測和安防系統
iCAN2023:應用TDK產品的優秀項目展示③:盲區偵測和安防系統
本次為參賽選手們免費提供四種產品
用于作品創作研發。
以下為大家介紹2例
使用TDK產品的優秀項目的內容!
學校:山東交通學院
成員:秦笑、李海錦、李宜達、趙淑同、熊梓姍
在國省道、縣鄉道路,存在大量的地形復雜,路窄、彎道多、坡陡,還有部分道路穿過村莊,易造成駕駛員視線遮擋,交通狀況復雜,主路駛過的車輛與支路車輛、行人碰撞事故很多。存在道路交通安全隱患,雖然事故多發路段設立了多種多樣的提示標語與警示標志,像常規的廣角鏡、標志牌等,但效果還是不夠理想,針對急轉彎、陡坡彎道、村莊平角路口等不利地形或復雜路段的交通安全問題,迫切需要采用智能化交通技術對道路交通進行實時動態的偵測、提示、引導,實現道路交通安全有序、保障交通參與者生命和財產安全的目標。項目主要設置在道路轉角處,集醒目預警、測速測距、輔助查看功能于一體。可以主動判斷轉角道路對側移動物體(行人/車輛),若轉角對側移動物體是行人(車輛),則裝置上的人形(車形)警示標志會不斷閃爍,顯示屏顯示該行人(車輛)的速度和到轉角的距離等信息。另外,本項目將收集到的轉角道路路況數據信息(包含裝置位置、運行情況),實時上傳至基于SSM的后臺系統,進行算法分析更新特征向量樣本集,可方便人員進行維修以及降低裝置的誤判率。
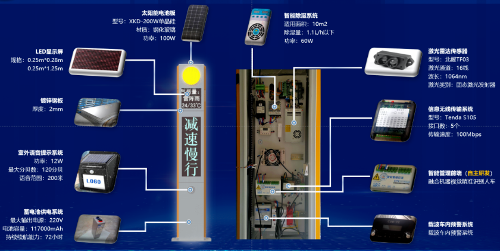
本項目集智能識別、測速測距、醒目預警、算法分析、輔助查看于一體,可以主動判斷轉角道路對側移動物體(行人/車輛),若轉角對側移動物體是行人(車輛),則裝置上的人形(車形)警示標志會不斷閃爍,顯示屏顯示該行人(車輛)的速度和到轉角的距離等信息。本項目可減少因障礙物遮擋視線或天氣原因(如霧霾天氣)造成的交通事故,主動提供出行者轉彎道路對向移動物體的信息,可用于山區多彎地帶、城市轉彎道路、匝道、地下停車場、高檔別墅區、企業工廠、旅游景點等場地。另外,可實時為地圖軟件提供道路轉角信息,方便出行者查看。
本項目應用在道路轉角處,采用主動預警的方式告知出行者轉角對側的路況信息,利用激光雷達傳感器、計算機算法(如卡爾曼濾波算法、多傳感器融合算法、模糊聚類算法)和后臺系統對信息進行檢測、分析、發布。傳感器檢測到的信息發送至微控制器中并進行數據處理,將處理后的有關數據發送至警示燈和LED顯示屏,使之顯示“人形/車形”圖案、移動物體的速度和到轉角的距離等信息。同時SIM868模塊獲取裝置的GPS信息,并將數據統一打包發送至后臺。項目可檢測距離轉角處110米處對側是否有移動物體,并在距轉角100米處開始檢測并判別對向移動物體的性質和狀態。
當行駛物體進入轉角路段,硬件—智能檢測顯示系統開始檢測,包括以下步驟:
步驟1:激光雷達傳感器監測轉角路段,通過三維成像處理技術對轉角處進行三維成像;
步驟2:利用機器視覺進行人車判斷,若行駛物體包含車輛,則其輸出有效信號,同時進行對該車輛進行測速測距,然后進入步驟4;
步驟3:利用機器視覺進行人車判斷,若行駛物體包含行人,則其輸出有效信號,同時進行對該行人進行測速測距,然后進入步驟4;
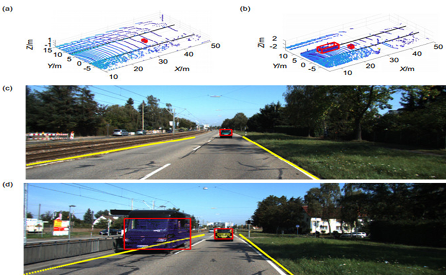
步驟4:激光雷達傳感器發送相關信息至微控制器,微控制器進行數據處理,將處理后的有關數據發送至警示燈和LED顯示屏,同時開啟SIM868GSM /GPRS/GPS模塊獲取GPS信息,通過SIM868 GSM/GPRS/GPS模塊的GPRS功能將檢測到的信息統一打包發送至后臺服務器;
步驟5:服務器將接收到的數據分類儲存,積累一定數據后,將有關信息進行模糊聚類分析,得到更加精準的特征向量區間,并且定期將該特征向量區間發送至微控制器,作為更新后的特征向量樣本集,微控制器依據此樣本集來進行判斷,使裝置判斷更加準確。
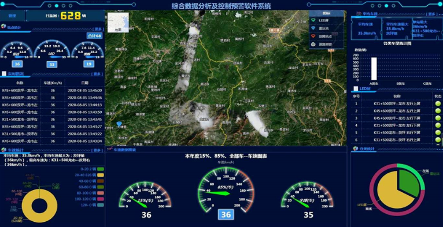
項目利用先進的算法分析數據,精準識別移動物體的類別,大大降低系統誤判率;
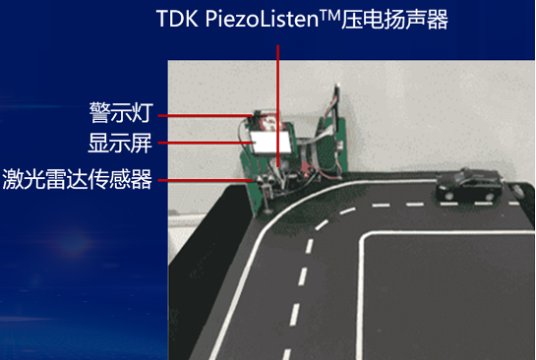
創新性地設計“人形”、“車形”警示燈,并且顯示屏實時顯示詳細信息,主動并醒目地將提示信號提供給駕駛員,提前預警,有效降低道路轉角盲區交通事故發生率;采用長壽命、高亮度的 LED 點陣屏顯示會車情況,并且區分人車。
項目具有可兼容性好,抗干擾能力強等特點,項目硬件設備可以應對各種惡劣天氣,正常運作于各種路況條件的彎道,軟件可以在各種操作系統下正常運行。
采用TDK PiezoListen??壓電揚聲器進行警示,加強了低音域的輸出,輕薄,壓電音質靈敏,安裝容易,車輛以80km每小時的速度在距離裝置 100米的位置可清晰的聽到預警聲音。
學校:鄭州大學
成員:張家碩、楊育成、王嘉旭、周慶鑫
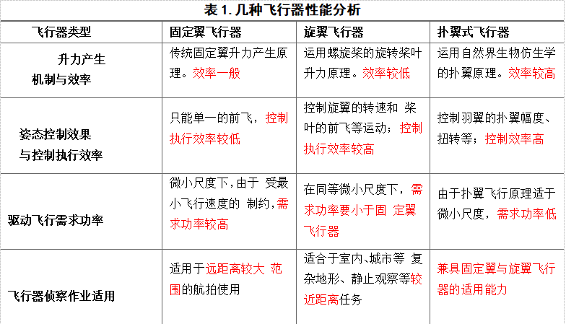
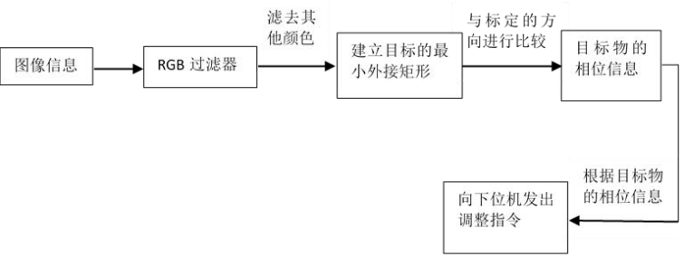
勝羽仿生無人機與傳統固定翼微型飛行器及旋翼微型飛行器相比,勝羽撲翼微型飛行機器人不僅具有體積微小、隱蔽性和偽裝性更高、靈活性好、可操控性好、成本低廉、便于攜帶,并可集群控制的特點。更重要的是可懸停功能使得撲翼微型飛行器的靈活性和可操縱性大大提高。可廣泛運用于農、林、牧、漁,各種工業廠礦、電力、通信等單位的巡檢、安全保障等方面。并且這款空中仿生機器人采用了基于卷積神經網絡的深度學習的圖像識別算法。在具體工作時,攝像頭所采集的空中圖像將先通過圖像處理程序去除圖像的噪聲,然后傳入已經訓練好的卷積神經網絡里進行處理,從而在較短的時間里識別出圖片里的目標物體,進而通過圖片里物體的相對位置進而傳輸給控制系統進行機器人工作狀態的調整。
鳥類仿生撲翼式設計
與傳統固定翼微型飛行器及旋翼微型飛行器相比,撲翼微型飛行機器人不僅具有體積微小、隱蔽性和偽裝性更高、靈活性好、可操控性好、成本低廉、便于攜帶,并可集群控制的特點。更重要的是可懸停功能使得撲翼微型飛行器的靈活性和可操縱性大大提高。可廣泛運用于農、林、牧、漁,各種工業廠礦、電力、通信等單位的巡檢、安全保障等方面。
深度學習的圖像識別算法
傳統圖像識別方法中特征提取主要依賴人工設計的提取器,需要有專業知識及復雜的調參過程,同時每個方法都是針對具體應用,泛化能力及魯棒性較差,深度學習主要是數據驅動進行特征提取,根據大量樣本的學習能夠得到深層的、數據集特定的特征表示,其對數據集的表達更高效和準確,所提取的抽象特征魯棒性更強,泛化能力更好,并且可以是端到端的。相對于傳統方式,不需要做大量的特定領域知識的特征提取,同時可以提取到傳統方式難以提取到的深層抽象特征。這是傳統算法所不能比擬的。
其次傳統算法在大規模的樣本識別時的由于大量冗余的 proposal 生成,導致學習效率低下,容易在分類出現大量的假正樣本。同時傳統算法的特征描述子都是基于低級特征進行手工設計的,難以捕捉高級語義特征和復雜內容。而且檢測的每個步驟是獨立的,缺乏一種全局的優化方案進行控制。而深度學習則有效的避免了這些因素,相對于傳統方式,深度學習不需要做大量的特定領域知識的特征提取,同時可以提取到傳統方式難以提取到的深層抽象特征。在抗噪方面深度學習所得到的網絡的抗噪性也較傳統算法有優勢。
最后,由于空中背景環境的復雜性,將極易導致依賴人工設計的提取器的傳統圖像識別算法識別目標時出現問題,從而導致機器無法正常的工作并完成相應的目標,而采用深度學習的圖像識別算法在訓練時便可以通過不同噪聲環境下的樣本來增強系統的抗噪能力。
撲翼結構設計
在對生物飛行方式的分析中,我們注意到,飛行生物的撲翼動作并不是單一的上下撲動,而是一種極為復雜的運動形式,其生物在運動過程中翼尖軌跡呈現出弧線形、橢圓形“8”字形等,這些運動形式可以分解為上下撲動、周向扭轉和前后掃掠三自由度的合成。在此基礎上進行建模分析、運動學、動力學、流體力學、motion 仿真分析、ANSYS 有限元分析;設計出圖,建立控制系統,并進行樣機設計。
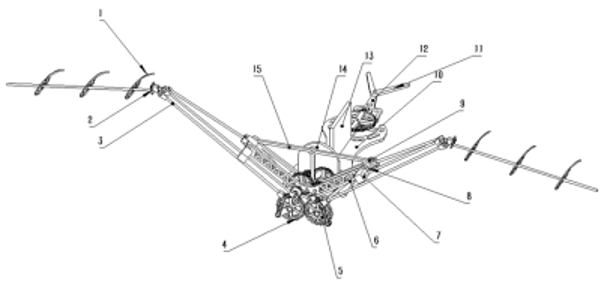
裝置組成:
執行系統(齒輪搖桿機構、機翼和尾翼)、動力系統(微型電機)、能源系統(電池)和控制系統(位姿傳感器、接收機、遙控器)四部分組成。
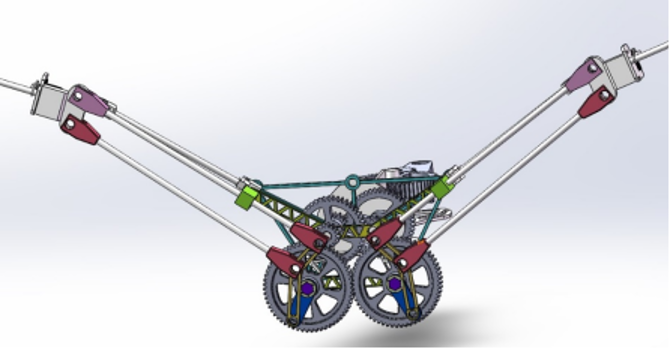
首先,電池帶動微型電機旋轉,電機旋轉經齒輪減速后驅動對稱齒輪轉動,從而帶動搖桿運動,搖桿與撲翼桿相連,可以實現撲翼桿的上下撲動,撲翼桿上下撲動可以產生運動所需的升力和推力,最終實現該機器的運動。同時,電池為尾翼舵機供電,通過控制尾翼的擺動實現該機器的轉動。控制系統通電后可以實現對該裝置飛行位置以及姿態的檢測與控制。
為了實現復雜的撲翼運動,我們采用多自由度曲柄搖桿機構驅動。為了能夠精確控制左右翼來實現機器人的姿態變換,我們確定了左右翼獨立驅動的方案。其運動過程可以簡單劃分為四個階段:下撲階段、彎曲階段、上提階段、展平階段。
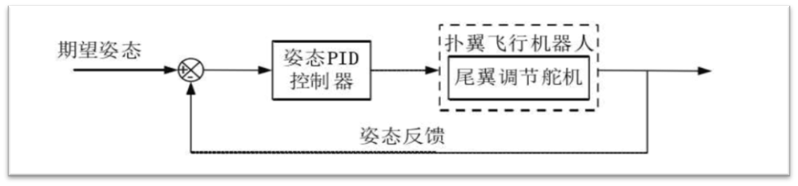
姿態控制系統:
用mpu9250陀螺儀和BMP280氣壓計進行實時的姿態和高度檢測,運用pid控制算法進行信息處理來實時對撲翼鳥的的姿態進行控制,實現飛行旋轉功能。操作手在地面通過遙控器發送信號,撲翼鳥利用NF2401 2.4G模塊進行通訊無線通訊當stm32接收到無線模塊發來的數據后進行CRC校驗并進行解算得到pitch軸和yaw軸的期望角度,在pid的控制下精準控制襟翼的拍打頻率以及尾翼的偏轉方向。
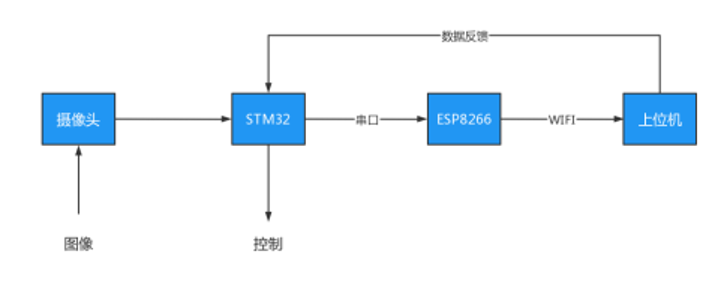
圖傳功能:
用ARM系列芯片STM32F407VET6做為發射和接收端的主控,利用OV2640模塊采集現場圖像,壓縮成jpeg格式的圖像數據。stm32通過DCMI接口獲取OV2640攝像頭采集到的圖像數據。然后配置好ESP8266,讓其連接上位機服務器。將STM32采集到的圖像數據通過串口傳輸給ESP8266。ESP8266和上位機通過TCP/IP協議通訊,ESP8266將STM32發送過來的數據通過WIFI發送給上位機,上位機將圖像數據解析為圖像顯示出來。
空中監測和驅鳥原理:
空中監測由控制系統、動力系統、結構及輔助系統三大部分組成。其中,控制系統主要包括主控制器、從控制器、深度計、攝像頭、電機驅動器等幾個部分。其中,主控制器為 Raspberry Pi,其主要用于圖像信息處理,并存儲六軸加速度傳感器的數據;從控制器為 Pixhawk。Pixhawk 具有板載的陀螺儀、加速度計、指南針,用于感知設備的狀態。它可以采集傳感器信息,控制推進器、燈光、電機等且用于控制驅動,調整撲翼的擺動與轉動,同時聯合六軸加速度傳感器與深度計數據調整電機運行保障機器的實際工作狀況穩定。動力系統包括電源、撲翼,為機器人移動等各種活動提供動力。
飛行器采用了揚聲器驅鳥,使用TDK PiezoListen??壓電揚聲器,輕便且功能性強,仿生鳥可通過揚聲器發出鳥的叫聲,能夠實現在機場或農田發現害鳥后發出害鳥天敵的聲音,達到在農田或者機場驅趕害鳥的目的,從而保證機場的正常運行與農田的正常生產。
機械結構集成輕質:基于曲柄雙搖桿結構特點,能促使機器人飛行靈活和產生更大的有效升力。
實現圖傳功能:利用OV2640模塊采集圖像數據,stm32通過DCMI接口獲取攝像頭采集到的圖像,并通過ESP8266將數據傳送給上位機,通過上位機將圖像顯示出來。
實現自主飛行功能:在無人控制的情況下能盤旋于空中對地面單位進行偵察,進一步簡化操作難度,提高該機器人的穩定性及實用性。
太陽能供電超聲波模塊:根據鳥類聽覺特性,安裝集合太陽能充放電智能控制和變頻超聲波控制的一體化控制器,在滿足超聲驅鳥的同時,保證了太陽能供電系統的穩定工作。
TDK的壓電揚聲器—PiezoListen?與已有壓電揚聲器相比,加強了低音域的輸出,使得更寬音域的輸出成為可能。TDK憑借自有的積層技術和材料技術,開發出纖薄高位移壓電元件,從而實現了上述功能。與一般的已有揚聲器相比,PiezoListe擁有世界上最薄級別(約0.49mm)的厚度,可不受空間限制進行安裝。同時,因形狀靈活,可以使很多東西振動,發出聲音。另外,PiezoListen也可以在低于24Vp-p的低電壓下獲得高聲壓。在4K 、8K視頻內容的發展以及聲音多通道化的進程中,TDK將繼續為客戶的應用程序設計和聲音進化做出貢獻。與已有壓電揚聲器相比,加強了低音域的輸出,使得更寬音域的輸出成為可能。
-
微控制器
+關注
關注
48文章
7542瀏覽量
151316 -
TDK
+關注
關注
19文章
692瀏覽量
79297 -
安防系統
+關注
關注
2文章
249瀏覽量
33259
發布評論請先 登錄
相關推薦
TDK賦能2024年iCAN大學生創新創業大賽,助推創新人才培養

樓宇安防智能監控系統
樓宇安防監控系統方案
藍牙模塊在智能安防系統中的應用
TDK加深與iCAN大學生創新創業大賽的合作,進一步擴大產品贊助范圍

龍蜥操作系統/Anolis OS榮登“2023生態開源項目”獎項榜單
國芯科技獲2023年度“優秀密碼應用方案獎“
國芯科技安全芯片產品群為視頻安防全生態安全提供解決方案

TDK助力2023年iCAN大學生創新創業大賽取得圓滿成功






 工商網監
工商網監
評論