


在進行閉環系統設計的時候,首先就需要考慮系統的穩定性,而這個就會涉及到相位裕度的問題,確定零極點位置,仿真stb,得到loop gain和loop phase,一個極點會使得增益曲線以20d B/decade下降,兩個極點則是40d B/decade,而有零點的話會減緩。一般這種系統都是負反饋系統。

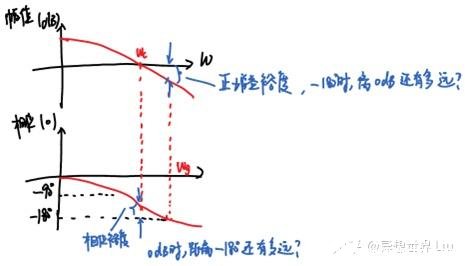
正常ADE仿真stb要保證相位裕度大于45度,可以保證系統穩定,一般都保證GBW內只有一個極點(即PM=90度。
相位裕度表明此時系統中的滯后有多大,這個負反饋是不是快要變成正反饋啦?在頻率 Wc處,相位再滯后PM,系統將達到臨界穩定狀態。
增益裕度也能體現系統的穩定性,增益裕度 Kg為一個系數,若開環系統的增益增加該系數倍,則閉環系統達到穩定的臨界狀態
對于一個穩定的非最小相位系統,其相位裕度應為正,增益裕度 Kg應大于1。當然,實際設計時,要保持足夠的相位裕度和增益裕度。
審核編輯:黃飛
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
反饋系統
+關注
關注
0文章
28瀏覽量
10289 -
閉環系統
+關注
關注
0文章
18瀏覽量
9552 -
相位裕度
+關注
關注
0文章
6瀏覽量
2784
發布評論請先 登錄
相關推薦
熱點推薦
航裕電源榮獲2024年度優秀企業獎
上海新閔經濟開發區"優秀企業獎"的評選,旨在表彰在科技創新、產業升級、經濟效益、社會責任等方面表現突出的標桿企業。航裕電源從眾多參評企業中脫穎而出,成為2024年度獲此殊榮的佼佼者之一。
buck電路的穩定性分析方法
Buck電路的穩定性分析方法主要涉及反饋增益、相位裕度、負載擾動以及控制策略等方面。以下是對這些分析方法的介紹: 一、反饋增益分析 反饋
lmx2531lq1910e的環路濾波器推薦的相位裕度為什么設計在70度?
lmx2531lq1910e的環路濾波器推薦的相位裕度為什么設計在70度,一般環路濾波器的相位裕
發表于 11-11 07:29
opa1622 TINA仿真模型相位結果與數據表中不符是怎么回事?
我下載官方的OPA1622仿真模型,并使用TINA TI仿真,根據數據表,連接成單位增益,接入1nf負載然后并聯2K負載電阻,發現相位裕度在25.6
發表于 09-29 08:38
OPA1622 PCB輸出跡線引起的電感,在容性負載下導致增益裕度過低怎么解決?
~100nH的跡線電感,我把100nH的電感串入到OPA1622的輸出端,然后接入330pf的電容模擬耳機線纜的分布電容,發現增益裕度只有7.2度
發表于 09-29 06:34
使用CDCE6214-Q1進行頻率裕度和eAVB系統設計
電子發燒友網站提供《使用CDCE6214-Q1進行頻率裕度和eAVB系統設計.pdf》資料免費下載
發表于 09-19 10:36
?0次下載

DACx3401為電源裕度和AVS提供整體解決方案應用說明
電子發燒友網站提供《DACx3401為電源裕度和AVS提供整體解決方案應用說明.pdf》資料免費下載
發表于 09-14 10:30
?0次下載
求助,關于帶寬與相角裕度關系疑問求解
有關這個比例放大電路,上面電路是開環測試電路,用來測試電路的環路增益以及相角裕度。
當反饋網絡中電容取330pF時,相角裕度為12.38
發表于 08-28 06:41
使用TINA進行穩定性分析時用幾種不同方式出現了較大的相位裕度差異,為什么?
25度左右,接著使用AC分析中的交流傳輸特性進行分析,得出交流增益峰值為27.3dB,與平坦處的20dB進行差值比對得出差值為7.3dB,然后使用穩定性分析課堂講解中的交流增益峰值與相位
發表于 08-21 06:03





 工商網監
工商網監

評論