") 在16通道演示器中驗(yàn)證的經(jīng)驗(yàn)型多通道相位噪聲模型
在16通道演示器中驗(yàn)證的經(jīng)驗(yàn)型多通道相位噪聲模型
本文詳細(xì)介紹一種在大型多通道系統(tǒng)中預(yù)測相位噪聲的系統(tǒng)方法,并將預(yù)測到的值與在16通道S頻段演示器上測量到的值進(jìn)行比較。這種分析方法基于一小組測量值,可用于估算相關(guān)和不相關(guān)的噪聲貢獻(xiàn)。僅依靠少數(shù)幾個(gè)測量值,就可以預(yù)測大范圍條件下的相位噪聲。其觀點(diǎn)是:任何特定設(shè)計(jì)都需建立自己的系統(tǒng)噪聲分析,而16通道演示器則提供一個(gè)特定設(shè)計(jì)示例作為基礎(chǔ)。本文討論基于16通道演示器的假設(shè)和相關(guān)限制,包含該假設(shè)何時(shí)適用,以及何時(shí)因?yàn)橄到y(tǒng)復(fù)雜性增加需要增加額外的噪聲項(xiàng)。本文主要描述如何在RF系統(tǒng)中實(shí)施相位噪聲優(yōu)化。在適當(dāng)情況下,提供描述本分析中使用的基本原理的參考資料。
相位噪聲是衡量所有RF系統(tǒng)設(shè)計(jì)的一個(gè)重要的性能指標(biāo)。在相控陣這類大型多通道RF系統(tǒng)中,通道之間彼此關(guān)聯(lián),其目標(biāo)之一就是利用分布式接收器和發(fā)射器的關(guān)聯(lián)組合,從陣列層級改善動態(tài)范圍。要達(dá)成此目標(biāo),面臨著一項(xiàng)系統(tǒng)工程挑戰(zhàn):分解出系統(tǒng)中相關(guān)和不相關(guān)的噪聲項(xiàng)。本文展示一種能估算16通道RF演示器的相位噪聲的系統(tǒng)方法,以幫助系統(tǒng)工程師開發(fā)出一種能評估大型系統(tǒng)的噪聲性能的分析方法。
相控陣內(nèi)的信號都包含在通道上不相關(guān)的噪聲項(xiàng)和在通道上相關(guān)的噪聲項(xiàng)。分布式組件的附加噪聲就是不相關(guān)的。但是,分布式組件共用的信號會產(chǎn)生相關(guān)的噪聲成分。挑戰(zhàn)在于:如何快速識別架構(gòu)中的相關(guān)噪聲項(xiàng)。共通或共享的內(nèi)容都會在通道中引發(fā)相關(guān)噪聲。示例包括共用LO、時(shí)鐘或電源。隨著系統(tǒng)復(fù)雜性增加,解決這些噪聲項(xiàng)會變得很困難。所以,如果能使用直觀方法從噪聲角度重新繪制架構(gòu),并且快速識別相關(guān)噪聲貢獻(xiàn)項(xiàng),將對構(gòu)建下一代系統(tǒng)的系統(tǒng)設(shè)計(jì)人員大有助益。
在本文中,我們通過16通道S頻段系統(tǒng)來演示方法,證明僅使用幾個(gè)經(jīng)驗(yàn)測量值,就可以較為準(zhǔn)確地預(yù)測其他多種通道組合下的相位噪聲。對于這種經(jīng)驗(yàn)?zāi)P停P(guān)鍵的一點(diǎn)是需要一些實(shí)際測量值。要從組件仿真直接進(jìn)入大型多通道相位噪聲估算(且具有不錯(cuò)的精度)并不容易。但是,僅使用幾個(gè)測量值,就能提取出相關(guān)和不相關(guān)的噪聲項(xiàng),使得多通道估算值較為準(zhǔn)確。我們的測量將預(yù)估值(1 dB以內(nèi))和16通道S頻段演示器的測量值進(jìn)行匹配。
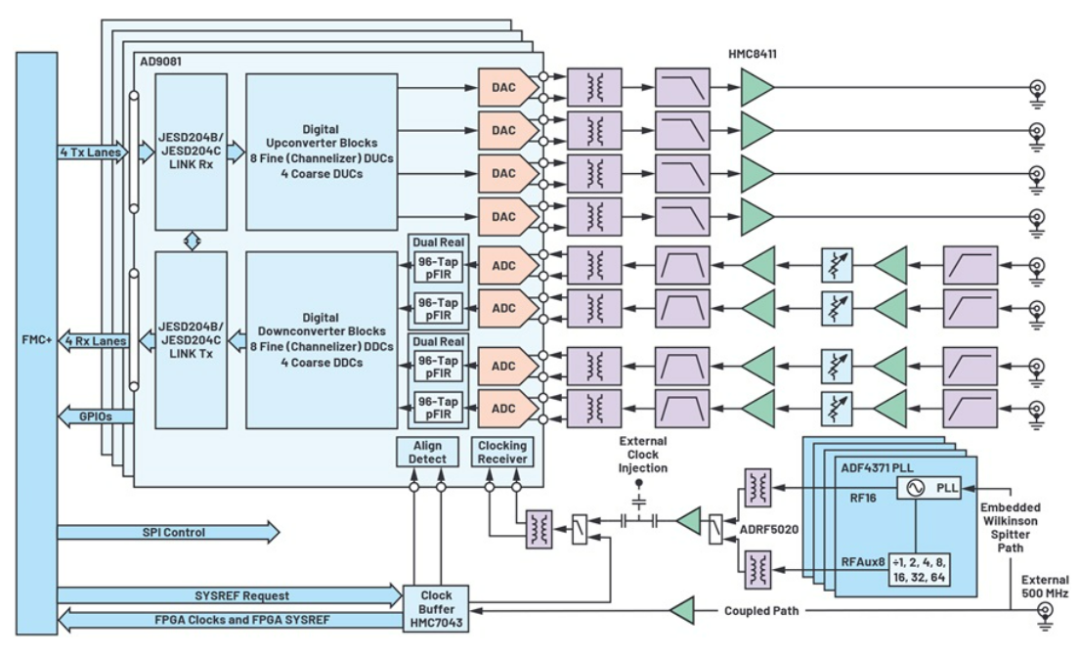
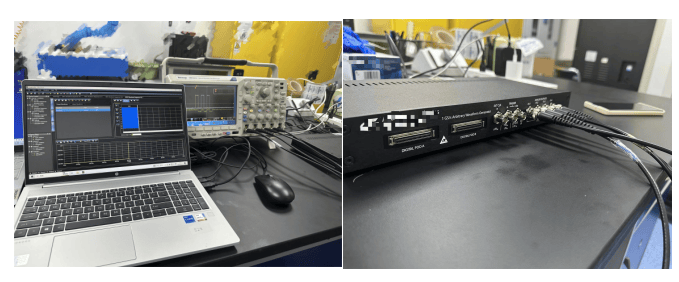
圖1. 16通道演示器:該平臺包含4個(gè)AD9081 芯片。每個(gè)AD9081 芯片包含4路射頻 DAC和4路射頻 ADC,提供總共16路發(fā)射和16路接收通道。
相關(guān)和不相關(guān)噪聲求和的背景
在自由空間或RF信號處理組合信號時(shí),每個(gè)信號增加的噪聲為

其中c表示相關(guān)系數(shù),范圍為–1至+1。如果c = –1,噪聲被消除;如果c = 0,噪聲不相關(guān);如果c = 1,噪聲完全相關(guān)。
假設(shè)校準(zhǔn)用于一致合并主信號,主信號將以20logN水平增加,其中N是通道數(shù)。
-
如果噪聲項(xiàng)不相關(guān)(c = 0),噪聲會以10logN增加。信號電平以20logN速率增加(比噪聲速率大10logN),SNR會隨之改善10logN。
-
如果噪聲項(xiàng)相關(guān)(c = 1),噪聲和信號一樣,也以20logN的速率增加,所以SNR不會改善。對于分布式系統(tǒng)來說,這并不是理想的結(jié)果。
-
在噪聲抵消電路中,會產(chǎn)生負(fù)相關(guān)系數(shù)。記下此案例,是為了補(bǔ)證公式1,但不加以詳述。
事實(shí)上,大型分布式系統(tǒng)包含在通道中部分相關(guān)的噪聲成分。所以,需要開發(fā)一種實(shí)用且直觀的系統(tǒng)級噪聲模型的方法。
16通道演示器
為了在多通道環(huán)境中評估最新的高速數(shù)據(jù)轉(zhuǎn)換器,16通道直接S頻段射頻采樣平臺被開發(fā)出來。該平臺包含4個(gè)AD9081 MxFE(混合信號前端)芯片。每個(gè) AD9081 芯片包含4個(gè)RF DAC和4個(gè)RF ADC,提供總共16個(gè)發(fā)射和16個(gè)接收通道。
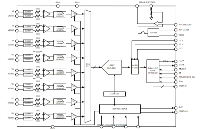
16通道評估平臺因?yàn)榫哂?個(gè)MxFE 芯片,所以命名為Quad-MxFE。總體框圖和板圖片分別如圖1和圖2所示。
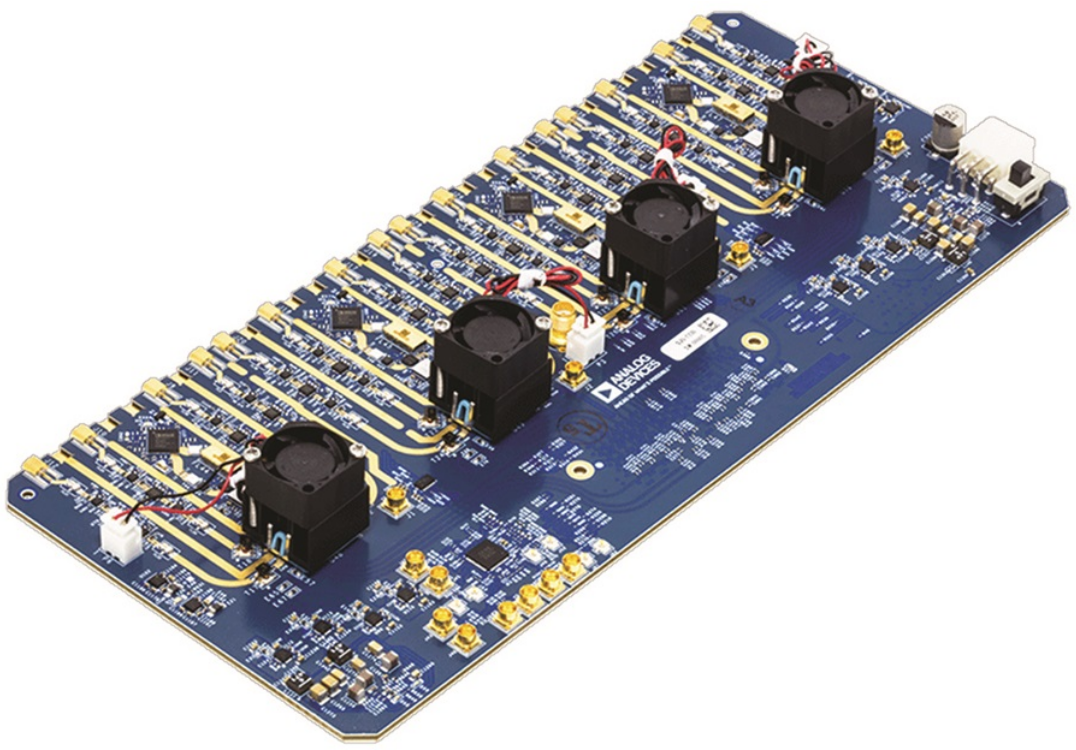
圖2. Quad-MxFE是一個(gè)16通道演示器。
多通道相位噪聲模型
圖1所示的16通道開發(fā)平臺框圖顯示了其功能范圍。從圖中可以看出,開始時(shí)并不清楚如何查看相關(guān)和不相關(guān)噪聲組件導(dǎo)致的噪聲部分。需要提供一種方法,從噪聲的角度考慮系統(tǒng)架構(gòu)。可以通過一份草圖,指出所有通道都存在的噪聲項(xiàng)、至于某些通道組相關(guān)的噪聲項(xiàng),以及與通道完全無關(guān)的噪聲項(xiàng)。圖3是對16通道開發(fā)平臺的圖解,將噪聲項(xiàng)分為三類。
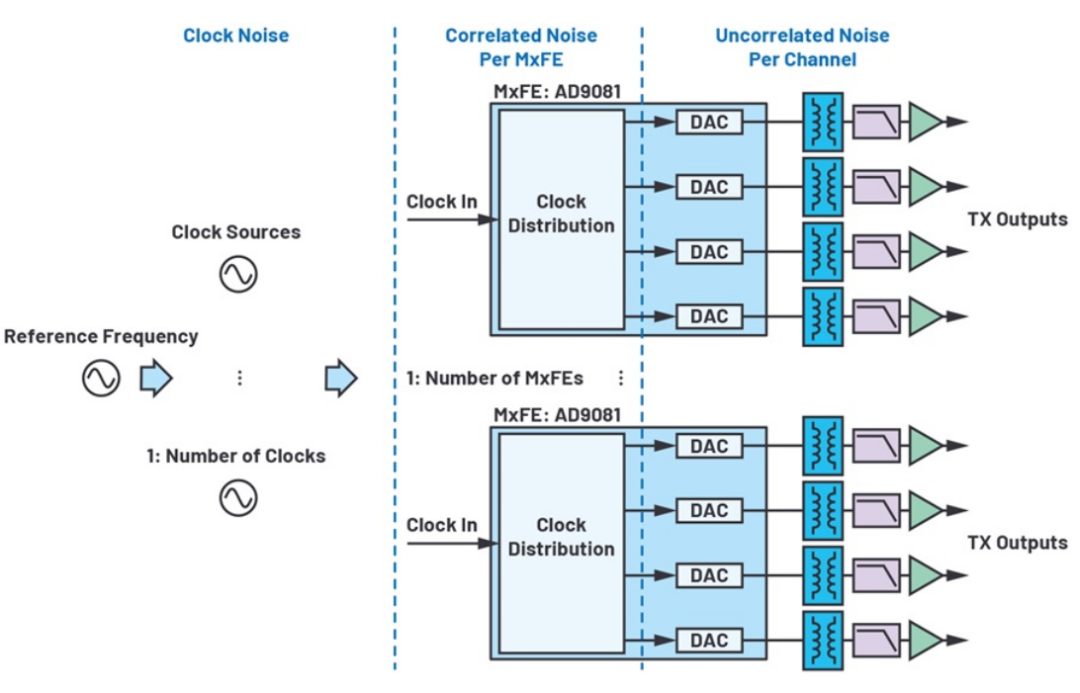
圖3. 從時(shí)鐘相位噪聲角度重新繪制的圖1。
-
Peter Delos名為 "帶有分布式鎖相環(huán)的相控陣的系統(tǒng)級LO相位噪聲模型"的文章總結(jié)了處理分布式鎖相環(huán)的分析方法。這份參考資料所用的分析方法說明了基準(zhǔn)頻率、分布式系統(tǒng)和PLL電路的噪聲分量,并說明了PLL環(huán)路帶寬造成的影響。
-
時(shí)鐘噪聲:Quad-MxFE提供適用于多種時(shí)鐘配置的選項(xiàng)。關(guān)于使用的特定配置,需要在相位噪聲模型中進(jìn)行說明。我們的測試跨所有通道使用1個(gè)通用低相位噪聲時(shí)鐘,或者使用4個(gè)獨(dú)立的分布式 ADF4371 鎖相環(huán)(PLL)頻率合成器來作為4個(gè)MxFE各自的時(shí)鐘輸入。對于單個(gè)通用時(shí)鐘,此噪聲與所有16個(gè)組合通道相關(guān)。對于使用4個(gè)ADF4371 PLL(1個(gè)MxFE 1個(gè))的情況,PLL噪聲與每個(gè)MxFE相關(guān),但跨MxFE無關(guān),而基準(zhǔn)電壓源噪聲則跨所有通道相關(guān)。
-
每個(gè)MxFE導(dǎo)致的相關(guān)噪聲:這是來自MxFE,與MxFE中的每個(gè)通道相關(guān)的噪聲。在此分析中,每個(gè)MxFE的相關(guān)噪聲包括每個(gè)芯片中常見的附加噪聲,以及芯片內(nèi)部各通道中常見的電源效應(yīng)。
-
每個(gè)通道的不相關(guān)噪聲:這是來自不同通道的噪聲差異。包括DAC內(nèi)核和所有放大器附加相位噪聲。在公式2中,此項(xiàng)被標(biāo)注為TXNoise。
根據(jù)所述的相位噪聲的貢獻(xiàn)分量,可以如下所示計(jì)算相位噪聲總和。
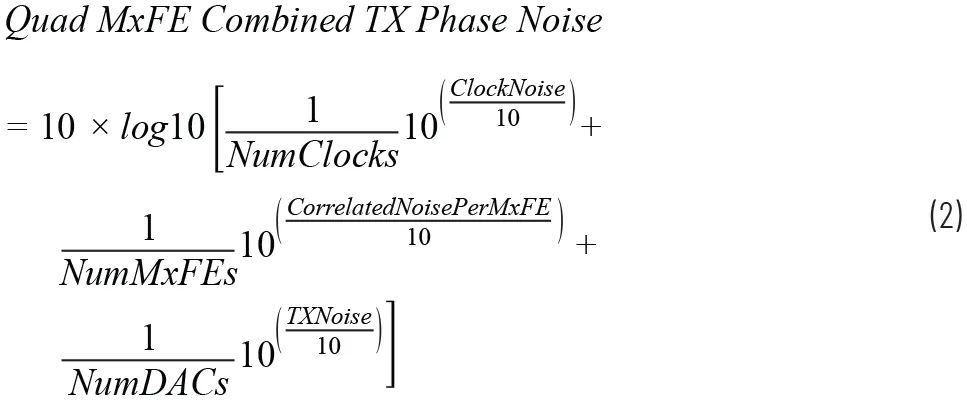
接下來,會提供一些額外的細(xì)節(jié),介紹如何簡化此模型,以適用于此測試臺。
-
電源效應(yīng):在低相位噪聲設(shè)計(jì)中,電源相位噪聲是一個(gè)需要重點(diǎn)考慮的因素。有關(guān)可用于解決電源噪聲問題的方法,請參閱文章 "電源調(diào)制比揭秘:PSMR和PSRR有何區(qū)別"和 "改進(jìn)的DAC相位噪聲測量支持超低相位噪聲DDS應(yīng)用。" 在本文的分析中,電源效應(yīng)被視為公式2中捕捉的噪聲項(xiàng)的子項(xiàng)。如果電源噪聲是IC中的相位噪聲的主要來源,且遍布在所有通道中,則需要像本文之前使用的每個(gè)MxFE導(dǎo)致的相關(guān)噪聲一樣,將此效應(yīng)當(dāng)做相關(guān)項(xiàng)進(jìn)行說明。
-
基準(zhǔn)振蕩器噪聲:在大型系統(tǒng)中,基準(zhǔn)振蕩器噪聲貢獻(xiàn)分量需要按文章"帶有分布式鎖相環(huán)的相控陣的系統(tǒng)級LO相位噪聲模型"中所述的一樣進(jìn)行分配。這個(gè)測試臺使用極低的相位噪聲基準(zhǔn)電壓源,產(chǎn)生的噪聲分量比其他分量低得多,所以未在噪聲總和公式中特別指出。
通過測量來驗(yàn)證模型
在公式2介紹了組合相位噪聲模型之后,下一個(gè)問題是"如何得到公式中使用的噪聲貢獻(xiàn)分量值?"在使用Quad-MxFE測試臺時(shí),可使用測量值來提取所需的信息:
-
時(shí)鐘源的絕對相位噪聲
-
不同MxFE的通道的附加相位噪聲
-
同一個(gè)MxFE的通道的附加相位噪聲
測試設(shè)置和測量值如圖4所示。圖4(b)和圖4(c)提供去除了共用時(shí)鐘源的附加噪聲測量。測量單個(gè)MxFE中的附加相位噪聲時(shí),也會去除MxFE中跨通道的相關(guān)噪聲。但是,在測量跨MxFE的附加相位噪聲時(shí),測量值中會包含MxFE中的相關(guān)噪聲。
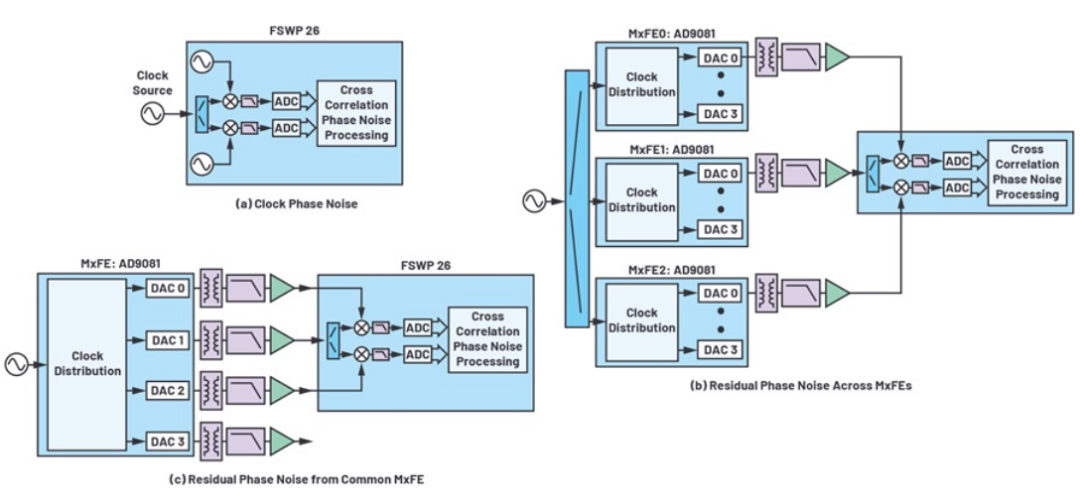
圖4. 使用三項(xiàng)測量來驗(yàn)證相位噪聲模型。
最后一步是將測量數(shù)據(jù)更改為公式2中使用的三個(gè)項(xiàng),如下所示:
-
時(shí)鐘噪聲 = 時(shí)鐘相位噪聲測量值(圖4(a))+ 20log (FOUT/FCLOCK)
-
每個(gè)MxFE導(dǎo)致的相關(guān)噪聲 = 跨MxFE的附加相位噪聲(圖4(b))– 通用MxFE的附加相位噪聲(圖4(c))。注意,進(jìn)行此計(jì)算時(shí),需要先轉(zhuǎn)化為線性功率,然后減去,然后重新轉(zhuǎn)化為dB,得出10log(10^(跨MxFE的附加相位噪聲/10)– 10^(通用MxFE的附加相位噪聲/10))
-
TxNoise = 通用MxFE的附加相位噪聲(圖4(c))。
關(guān)于附加相位噪聲測量的附加備注:我們發(fā)現(xiàn),使用此硬件時(shí),上述項(xiàng)2和3的噪聲項(xiàng)也隨頻率擴(kuò)展。轉(zhuǎn)化為其他頻率時(shí),還額外需要20log(FOUT/FMEAS)。并非所有硬件都是如此,每項(xiàng)設(shè)計(jì)需要單獨(dú)評估此項(xiàng)。
測量案例1:通用低相位噪聲時(shí)鐘
執(zhí)行此測量時(shí),在整個(gè)16通道演示器中使用一個(gè)低噪聲12 GHz時(shí)鐘。時(shí)鐘源為SMA100B,如圖1所示被注入到外部時(shí)鐘注入節(jié)點(diǎn)中。所示的條件適用于3.2 GHz發(fā)射輸出頻率。
從圖5(b)可以看出,跨MxFE的相關(guān)噪聲是最主要的貢獻(xiàn)分量。在系統(tǒng)中增加MxFE后,這種噪聲貢獻(xiàn)分量會增大,之后受通用時(shí)鐘源限制。根據(jù)每種貢獻(xiàn)分量的曲線形狀,僅在曲線上增加幾個(gè)點(diǎn)不足以得出準(zhǔn)確的預(yù)測,所以我們發(fā)現(xiàn)最好是直接在公式2中使用圖5(b)中的數(shù)據(jù)。然后,進(jìn)行一系列計(jì)算來驗(yàn)證該模型。從圖6至圖8可以看出,該模型提供的預(yù)測值準(zhǔn)確度非常高。
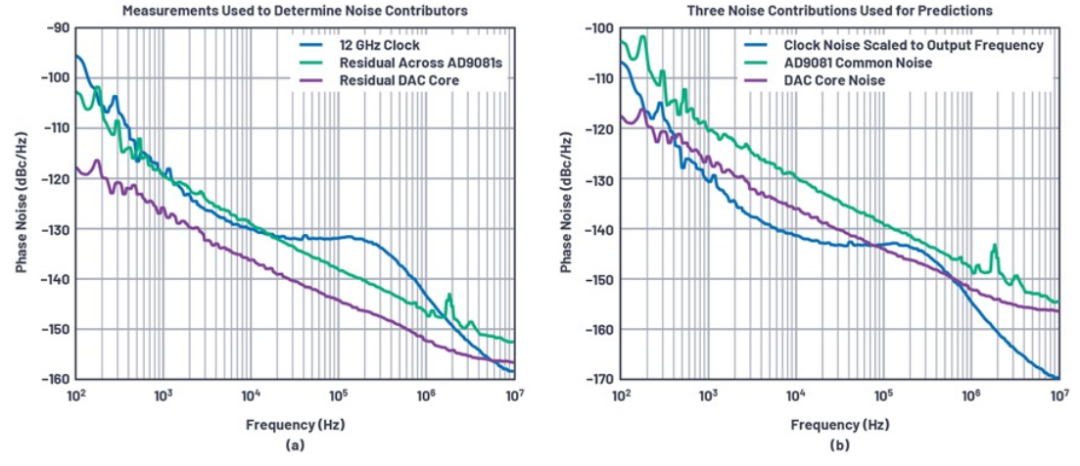
圖5. a) 用于驗(yàn)證相位噪聲模型的測量值,b) 計(jì)算得出的在模型中使用的相位噪聲貢獻(xiàn)分量。這是針對所有MxFE共用一個(gè)時(shí)鐘的情況。
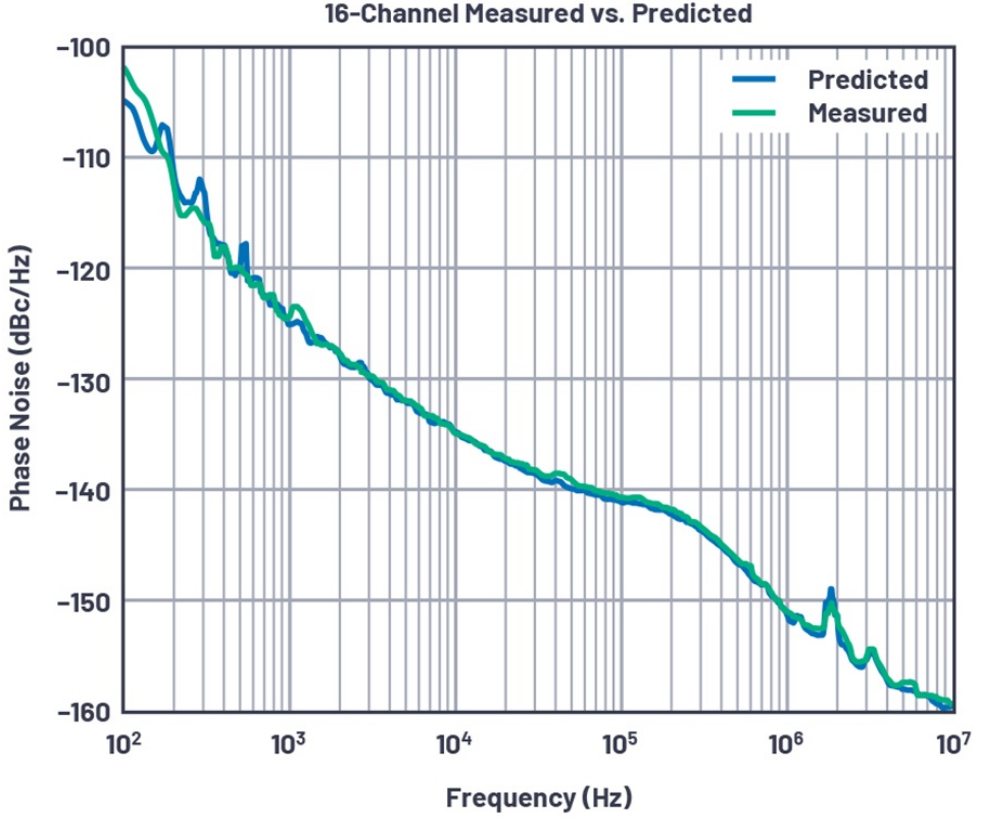
圖6. 3.2 GHz時(shí)16通道的測量值和模型預(yù)測值。
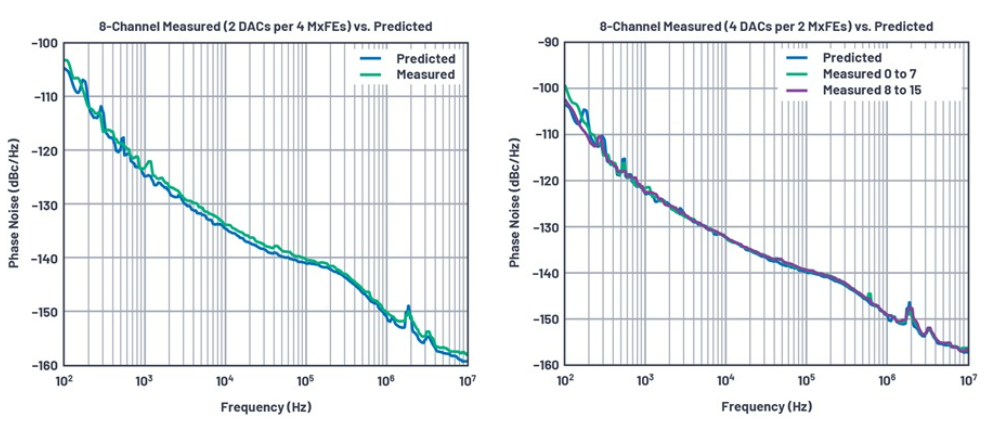
圖7. 3.2 GHz時(shí)8通道的測量值和模型預(yù)測值。兩圖之間的差異在于:MxFE如何共用發(fā)射通道。
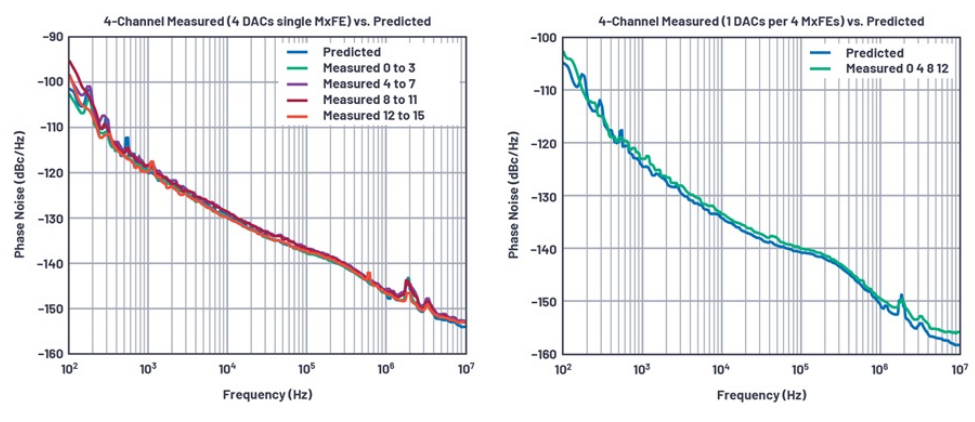
圖8. 3.2 GHz時(shí)4通道的測量值和模型預(yù)測值。兩圖之間的差異在于:MxFE如何共用發(fā)射通道。
一些關(guān)于測量值和預(yù)測值的觀察值得注意。在許多情況下,預(yù)測值幾乎與測量值完全一樣。在某些情況下,測量值略低于預(yù)測值。我們承認(rèn)這一點(diǎn),但無法給出準(zhǔn)確描述。圖8左側(cè)的圖提供了一個(gè)潛在的指示器。當(dāng)放大這些圖時(shí),我們發(fā)現(xiàn)預(yù)測值與兩個(gè)測量示例匹配,但測量案例的值稍高一點(diǎn)。可能是因?yàn)樵贏D9081 芯片中,每個(gè)MxFE導(dǎo)致的相關(guān)噪聲不完全相同,導(dǎo)致出現(xiàn)一些差異。第5節(jié)中描述的一些簡化假設(shè)可能也是導(dǎo)致出現(xiàn)差異的原因。在這些示例中,預(yù)測都相當(dāng)準(zhǔn)確,我們認(rèn)為這種方法對這種設(shè)計(jì)是有效的。
測量案例2:每個(gè)MxFE的分布式PLL
在本測量中,4個(gè)MxFE每個(gè)使用一個(gè)單獨(dú)的ADF4371,如圖1所示。ADF4371鎖定使用低相位噪聲500 MHz的基準(zhǔn)電壓源,設(shè)置提供12 GHz輸出。圖9顯示用于驗(yàn)證模型的測量值和噪聲貢獻(xiàn)分量。
 圖9. A) 使用獨(dú)立的ADF4371芯片作為時(shí)鐘輸入源時(shí),用于驗(yàn)證相位噪聲模型的測量值,b) 計(jì)算得出的在模型中使用的相位噪聲貢獻(xiàn)分量。這是針對每個(gè)MxFE的分布式PLL的情況。
圖9. A) 使用獨(dú)立的ADF4371芯片作為時(shí)鐘輸入源時(shí),用于驗(yàn)證相位噪聲模型的測量值,b) 計(jì)算得出的在模型中使用的相位噪聲貢獻(xiàn)分量。這是針對每個(gè)MxFE的分布式PLL的情況。
在本示例中,PLL是主要的噪聲源,MxFE貢獻(xiàn)的噪聲分量遠(yuǎn)低于時(shí)鐘噪聲。如圖10所示,根據(jù)分布式系統(tǒng)使用的PLL的數(shù)量,組合噪聲相應(yīng)改善。
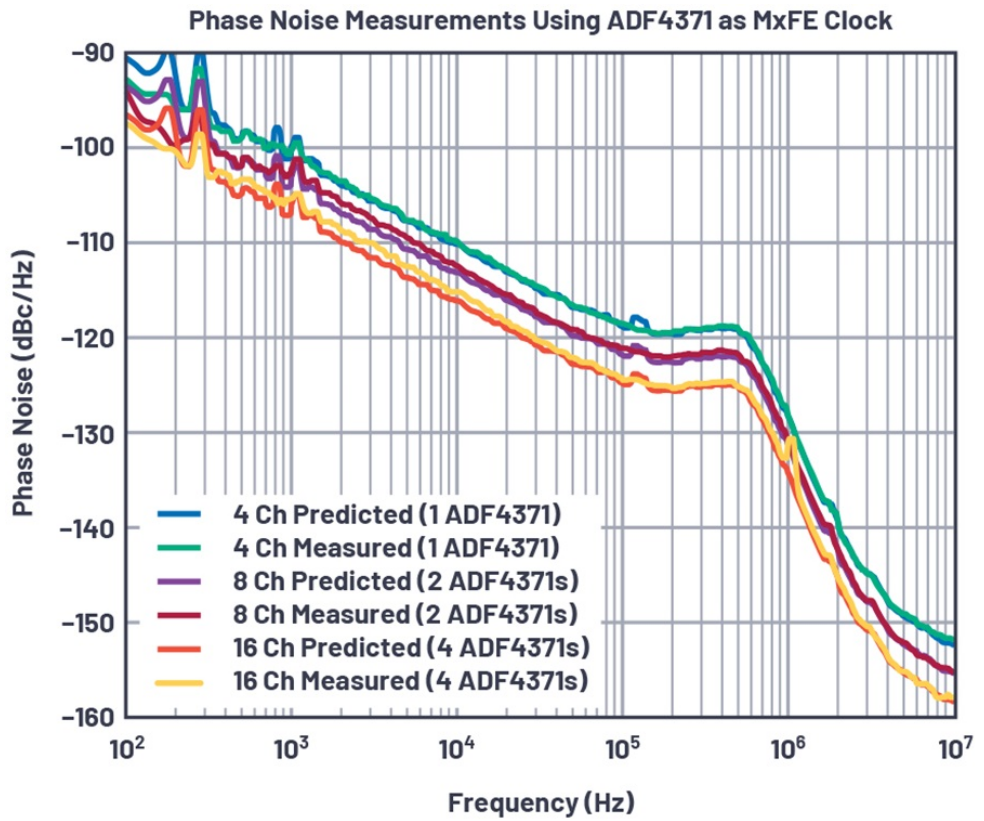
圖10. 在使用ADF4371作為每個(gè)MxFE的時(shí)鐘源時(shí),在組合多個(gè)相位一致的發(fā)射通道之后,在3.2 GHz時(shí)的測量值和根據(jù)模型得出的預(yù)測值。
結(jié)論
本文顯示能夠相當(dāng)準(zhǔn)確地預(yù)測組合通道中的相位噪聲的經(jīng)驗(yàn)?zāi)P汀J褂么朔椒ǖ那疤崾牵菏紫葟脑肼曉吹慕嵌炔榭丛撓到y(tǒng),并重新繪制框圖,以便查看相關(guān)項(xiàng)和不相關(guān)的項(xiàng)。
我們還著重突出"經(jīng)驗(yàn)"一詞,這意味著建議方法是通過觀察或經(jīng)驗(yàn)進(jìn)行驗(yàn)證,而不是根據(jù)理論或純邏輯進(jìn)行驗(yàn)證。對于相位噪聲示例,提出的觀點(diǎn)是要評估區(qū)域和貢獻(xiàn)分量,需要使用一些測量值和觀察結(jié)果。了解上述這些之后,即可系統(tǒng)性地計(jì)算系統(tǒng)噪聲。
本文使用的數(shù)據(jù)和公式在一定程度上只適用于該硬件,基于之前描述的觀察結(jié)果。但是,這種方法可用于任何多通道系統(tǒng)。更通用的框圖如圖11所示。先介紹系統(tǒng)基準(zhǔn)振蕩器,然后根據(jù)通道級硬件繪制時(shí)鐘和LO分布,可以更直觀地查看大型系統(tǒng)中的噪聲貢獻(xiàn)源。
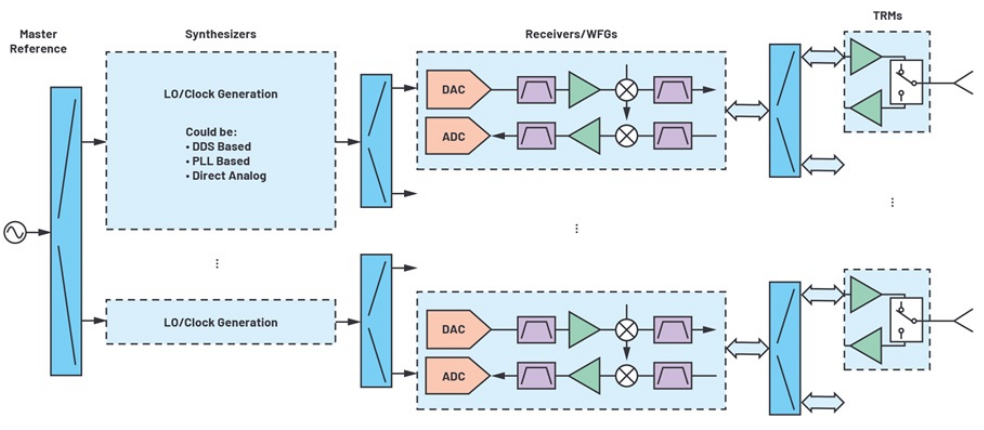
圖11. 從相位噪聲角度繪制的通用相控陣示意圖。每個(gè)信號都包含噪聲項(xiàng),它們是陣列中分布的噪聲分量的組合。從這個(gè)角度重新繪制系統(tǒng)圖之后,可以更容易在系統(tǒng)層面顯示關(guān)于相關(guān)和不相關(guān)噪聲的跟蹤。如果設(shè)計(jì)人員先繪制系統(tǒng)基準(zhǔn)振蕩器,然后根據(jù)通道級硬件繪制時(shí)鐘和LO分布,可以更直觀地顯示大型系統(tǒng)中的噪聲貢獻(xiàn)源。
 ?查看往期內(nèi)容↓↓↓
?查看往期內(nèi)容↓↓↓
原文標(biāo)題:在16通道演示器中驗(yàn)證的經(jīng)驗(yàn)型多通道相位噪聲模型
文章出處:【微信公眾號:analog_devices】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
亞德諾
+關(guān)注
關(guān)注
6文章
4680瀏覽量
15949
原文標(biāo)題:在16通道演示器中驗(yàn)證的經(jīng)驗(yàn)型多通道相位噪聲模型
文章出處:【微信號:analog_devices,微信公眾號:analog_devices】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
多通道相參且相位可調(diào)射頻信號產(chǎn)生系統(tǒng)

ADS1299-4在進(jìn)行四通道信號采集時(shí),有時(shí)隨機(jī)出現(xiàn)某一通道或者多通道疑似滿量程,為什么?
擴(kuò)展電網(wǎng)應(yīng)用中的模擬輸入通道(使用16通道、16位、1MSPS雙路同步采樣ADC)

AS3693B1_16通道節(jié)能LED控制器IC英文手冊
CDC3RL02低相位噪聲雙通道時(shí)鐘扇出緩沖器數(shù)據(jù)表
MPQ3326 16通道WLED驅(qū)動器英文手冊
TX7316三級16通道或五級8通道發(fā)送器數(shù)據(jù)表
TX7516五級16通道發(fā)送器數(shù)據(jù)表
ADS114S0xB低功耗、低噪聲、高集成度、6通道和12通道、4kSPS、16位 Δ-Σ ADC數(shù)據(jù)表
多通道任意波發(fā)生器多路輸出測試中的應(yīng)用
具有高級診斷功能的汽車低噪聲16通道LED矩陣管理器TPS92664-Q1數(shù)據(jù)表
具有高級診斷功能和集成振蕩器的汽車類低噪聲16通道LED矩陣管理器TPS92665-Q1數(shù)據(jù)表
具有高級診斷功能的汽車類低噪聲16通道LED矩陣管理器TPS92667-Q1數(shù)據(jù)表
IT6113: 高速M(fèi)IPI DSI 4通道轉(zhuǎn)8通道轉(zhuǎn)接芯片資料
用于多軸定位系統(tǒng)的16位8通道ADC GAD7606,兼容AD7606





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論