") 三大場景,這款伺服控制器這樣點亮生活
三大場景,這款伺服控制器這樣點亮生活
伺服控制器是一種用于精確控制電機運動的電子設(shè)備,通過接收來自控制系統(tǒng)的指令以及監(jiān)測電機的位置、速度等參數(shù),實現(xiàn)對電機的精確控制。基于高精度、高速度、高可靠性等優(yōu)點,在制造業(yè)、航空航天、醫(yī)療設(shè)備等領(lǐng)域有廣泛的應(yīng)用。
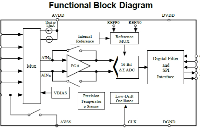
伺服控制器的關(guān)鍵是伺服控制芯片,例如ADI旗下的TMC4671就是一款完全集成的伺服控制芯片,可以為直流無刷電機、永磁同步電機、步進電機、直流有刷電機和音圈電機提供磁場定向控制。其特點是所有的控制功能都被集成在硬件上,例如集成了ADC、位置傳感器接口、位置差值器,該款功能齊全的伺服控制器適用于各種伺服應(yīng)用。本文以三個用例,看伺服控制器如何點亮生活。
具有自主診斷功能的靜音正壓睡眠呼吸機
睡眠呼吸機是用于治療在睡眠狀態(tài)下病人上呼吸道阻塞的一種設(shè)備。睡眠時上呼吸道阻塞會造成鼾聲、血氧降低、代謝紊亂等狀況,長期會導(dǎo)致或加重各種慢性疾病。睡眠呼吸機通過對患者呼吸道持續(xù)輸送一定壓力的氣流,從而形成氣體支架,支撐患者的氣道開放,保證患者的呼吸通暢,消除鼾聲以及阻塞性睡眠呼吸暫停低通氣綜合征(OSAHS)所帶來的負(fù)面影響。

多數(shù)使用正壓睡眠呼吸機的患者是在睡眠期間使用該設(shè)備,所以呼吸機的通氣舒適度及靜音性能是其重要的產(chǎn)品設(shè)計指標(biāo)。另外,睡眠呼吸機的一項重要功能之一,是能在系統(tǒng)發(fā)生異常時,及時發(fā)現(xiàn)并立即采取適合的保護措施,其核心要點即是呼吸機風(fēng)機的控制。
正壓睡眠呼吸機硬件設(shè)計方案使用TMC4671+TMC6200的組合,可以大大降低高性能電機驅(qū)動器設(shè)計的門檻,使用戶可以非常快速地搭建相關(guān)的高性能電機應(yīng)用,無需編寫復(fù)雜費時的底層驅(qū)動,節(jié)省了了大量的調(diào)試時間。此外,相關(guān)診斷功能使工程師在調(diào)試初期可快速定位系統(tǒng)故障,配合TMC IDE,用戶可以方便地進行系統(tǒng)辨識和控制參數(shù)優(yōu)化,加速產(chǎn)品設(shè)計定型。如此一來,用戶可專注于產(chǎn)品本身的設(shè)計優(yōu)化,這是未來電機控制應(yīng)用的方向。
電機控制核心FOC算法及控制由TMC4671完成,功率驅(qū)動部分及電流采樣使用TMC6200完成。TMC4671極大簡化了電機控制部分的算法,解放了MCU的算力,使用戶可以專注于系統(tǒng)應(yīng)用級的設(shè)計,如更適于患者的壓力流量曲線等。通過壓力傳感器反饋,壓力值經(jīng)由MCU進行運算后,其輸出作為TMC4671的速度給定信號,TMC4671輸出風(fēng)機控制SVPWM信號給TMC6200,TMC6200作為MOS管門級驅(qū)動,控制三相H橋以驅(qū)動電機運行,使呼吸機壓力保持在需要的值或按給定的曲線變化。
基于TMC4671的+TMC6200的方案,可以帶來三大系統(tǒng)優(yōu)勢:涵蓋極高動態(tài)的電機轉(zhuǎn)速范圍——雙水平模式下,電機轉(zhuǎn)速范圍會在10000rpm以內(nèi)及25000rpm以上快速切換,轉(zhuǎn)速切換時間可低于0.5秒;此外,該方案還可維持盡可能小的噪聲,呼吸機壓力為10cm水柱時一般要求低于30dB,高端的產(chǎn)品可以做到23dB及以下;第三,具有靈活方便的系統(tǒng)診斷和保護機制——以方便的結(jié)合驅(qū)動器信息及相關(guān)傳感器定位相關(guān)異常事件,包括呼吸面罩脫落、呼吸管路漏氣、風(fēng)機堵轉(zhuǎn)等等。
設(shè)計下一代電動自行車,助力超能力騎行
下一代電動自行車的許多創(chuàng)新將是電動機驅(qū)動器和儲能系統(tǒng)的觸發(fā),其中最重要的可能將集中在控件和用戶界面系統(tǒng)的改進,這些控件提供了更好的總體用戶體驗,并使電動自行車能夠適應(yīng)騎手的需求。
TMC4671為電動自行車制造商提供了其他方法來定制其產(chǎn)品的用戶體驗,包括將轉(zhuǎn)矩/速度曲線微調(diào)到其客戶的預(yù)期使用情況。控制器還可以通過監(jiān)視其加速度傳感器并閃爍尾燈,以在檢測到自行車騎手急劇制動時提醒其他駕駛員,從而提高用戶安全性。下圖是由ADI Trinamic開發(fā)的實驗性電動貨運自行車,是新一代電動貨運自行車的試驗臺,具有高效的驅(qū)動控制系統(tǒng),再生制動和其他新功能。
TMC4671智能電機控制器為基于BLDC的電動自行車驅(qū)動系統(tǒng)提供了完整的解決方案。控制器功能強大的集成MCU可以進行編程,以提供自定義用戶體驗,并遵守有關(guān)最大速度和對踏板輸入的響應(yīng)的區(qū)域性法規(guī)。因此,ADI致力研究傳感方案和控制算法,以使自行車的電動機以對稱的方式做出響應(yīng),并在騎手開始踩踏板時立即將扭矩傳遞至驅(qū)動輪。減少或消除非對稱輔助的最具成本效益的方法是使用來自左踏板的輸入來估計在右腳提供扭矩的那部分行程期間應(yīng)提供的支撐量。
由于電動自行車很可能會以非線性方式加速,因此計算右踏板行程的電動機電流的算法不能簡單地匹配左踏板的最新扭矩讀數(shù)。ADI通過一種預(yù)測算法解決了這個問題,該算法使我們的控制器能夠在踏板旋轉(zhuǎn)的兩個半圈期間提供平穩(wěn),平衡的輔助。相同的算法使用踏板扭矩輸入來使電動自行車能夠從死點處提供一些輔助,然后自行車滾動后過渡到速度/扭矩模式。
高效、精確的電機控制方案加速機器人開發(fā)
隨著機器人技術(shù)的不斷發(fā)展,對高性能電機控制器的需求也日益增多,電機控制面臨諸多性能上的挑戰(zhàn),例如高精度位置控制和運動控制,快速響應(yīng)和靈活性、平滑的運動特性,以及動態(tài)性能和調(diào)速范圍、控制特性的連續(xù)性和直線性等等。
以廣泛應(yīng)用的AGV小車為例,在運動過程中涉及到人身安全、倉儲運行碰撞安全以及貨物安全等原因,所以它必須要有一個高精度的定位、運行及軌跡運行控制系統(tǒng)。要實現(xiàn)這一點,必須有一個可靠、高精度的伺服控制器來實現(xiàn)這一套軌跡運行。安全性極高的運動控制系統(tǒng),絕大多數(shù)情況下首選為伺服驅(qū)動器,但是傳統(tǒng)的伺服驅(qū)動器存在多方面的問題,例如體積大、價格昂貴,安裝與操作極其復(fù)雜,復(fù)雜的伺服算法等。
TMC4671作為一種先進的電機驅(qū)動器芯片,為機器人應(yīng)用提供了高效、精確的電機控制解決方案。此外,TMC4671采用先進的電機控制算法和功率電子技術(shù),具有高速度、高精度和高效率的特點。它能夠提供出色的電機控制性能,滿足各種機器人應(yīng)用的需求。而TMC4671提供簡單的接口和配置選項,更方便用戶進行配置和控制。通過使用少量的外部元件,可以輕松地將TMC4671集成到機器人系統(tǒng)中。
 ?
? ?查看往期內(nèi)容↓↓↓
?查看往期內(nèi)容↓↓↓
原文標(biāo)題:三大場景,這款伺服控制器這樣點亮生活
文章出處:【微信公眾號:analog_devices】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
亞德諾
+關(guān)注
關(guān)注
6文章
4680瀏覽量
15948
原文標(biāo)題:三大場景,這款伺服控制器這樣點亮生活
文章出處:【微信號:analog_devices,微信公眾號:analog_devices】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
?智能空調(diào)控制器的應(yīng)用場景與深遠意義?
使用MSP430? MCU的伺服電機控制器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論