 Fpga Verilog SDRAM模塊—單字讀寫案例
Fpga Verilog SDRAM模塊—單字讀寫案例
筆者與SDRAM有段不短的孽緣,它作為冤魂日夜不斷糾纏筆者。筆者嘗試過許多方法將其退散,不過屢試屢敗的筆者,最終心情像橘子一樣橙。
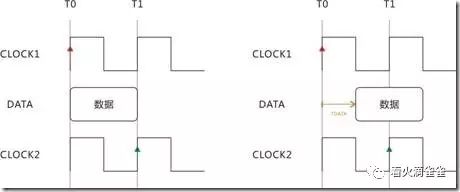
圖18.1 數據讀取(理想時序左,物理時序右)。
首先,讓我們來了解一下,什么才是數據讀取的最佳狀態?如圖18.1所示,紅色箭頭是上升沿,綠色箭頭是鎖存沿。左圖是理想時序讀取數據的最佳狀態,即T0發送數據,T1鎖存數據。右圖則是物理時序讀取數據的最佳狀態,即T0發送數據,然后數據經由 TDATA延遲,然后T1鎖存數據。理想狀態下,讀取數據不用考慮任何物理因數,凡是過去值都會讀取成功。
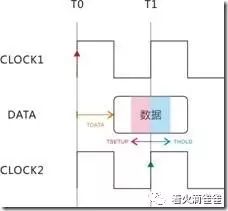
圖18.2 讀取數據(物理時序)。
然而物理狀態下,讀取數據則必須考慮物理因數,但是物理時序也有所謂的理想狀態,即數據被TDATA推擠,然后恰好停留在鎖存沿的正中間。該狀態之所以稱為理想,那是因為建立時間TSETUP與保持時間THOLD都被滿足。
如圖18.2所示,TSETUP從數據中間向左邊覆蓋,THOLD從數據中間向右邊覆蓋,如果兩者不完全覆蓋數據,那么數據的有效性就能得到保證。簡言之,數據是否讀取成功,建立時間還有保持時間都必須得到滿足。但是我們也知道,Verilog不能描述理想以外的東西,即Verilog無力描述TDATA。話雖如此,我們可以改變時鐘位移來達到同樣的效果。
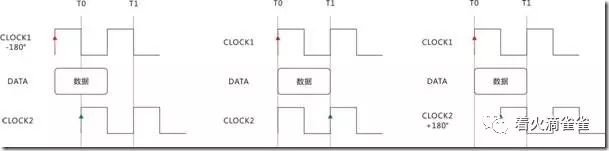
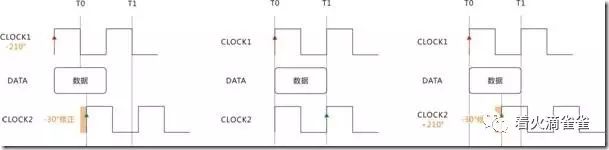
圖18.3 CLOCK1位移 -180°(左圖),沒有位移(中圖),CLOCK2 位移 +180°(右圖),以及修正結果。
常見的理想時序,最多適用在FPGA的內部而已。當描述功活動涉及FPGA的外部,那么理想時序必須考慮對外的情況。如圖18.3所示,中間的理想時序圖可以經由 CLOCK1 位移 -180°,又或者 CLOCK2 位移 +180° 來得到同樣的效果。雖說180° 的位移是理想效果,但是我們還要考慮物理路徑所帶來的影響。根據Alinix 301這只開發板,我們必須追加 -30° 位移才能達到修正的效果。(注意:追加-30° 的修正時序僅僅為適用Alinix 301這只板子而已)。理解完畢以后,我們便可進入正題。
驅動SDRAM而言,簡單可以分為以下四項操作:
(一)初始化
(二)刷新操作
(三)讀操作
(四)寫操作
初始化令SDRAM就緒,刷新操作就是不失掉內容(數據),讀操作就是從SDRAM哪里讀取數據,寫操作就是向SDRAM寫數據。其中,讀寫操作又有單字讀寫,多字讀寫還有頁讀寫。
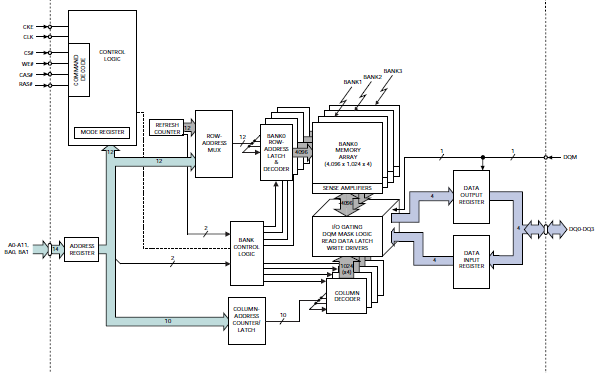
首先,讓我們來分析一下Alinx 開發板上HY57V2562GTR 這只SDRAM。根據手冊,這只SDRAM有256Mb的容量,4個BANK(即一個BANK為64Mb),頻率極限為200Mhz,數據保留周期為 8192 / 64ms。至于引腳定義如表18.1所示:
表18.1 SDRAM的引腳定義
| 分類 | 標示 | 信號 | 說明 |
| 時鐘信號 | CLK | S_CLK | 時鐘源 |
| 地址信號 | BA0~1 | S_BA[1:0] | BANK地址 |
| A0~A12 | S_A[12:0] | 讀寫地址,行列共用,A0~A12為行地址,CA0~CA8為列地址 | |
| 命令信號 | CKE | S_CKE, | 時鐘選,拉高有效 |
| CS | S_NCS, | 片選,拉低有效 | |
| RAS | S_NRAS, | 命令選,拉低有效 | |
| CAS | S_NCAS, | 命令選,拉低有效 | |
| WE | S_NWE | 命令選,拉低有效 | |
| 數據信號 | DQ0~DQ15 | S_DQ[15:0] | 讀寫數據的IO |
| LDQM,UDQM | S_DQM[1:0] | 遮蓋數據,一般拉低無視 |
如表18.1所示,CLK為SDRAM的時鐘源。CKE,CS,RAS,CAS還有WE皆為命令信號,五者相互組合形成以下幾個常用命令,結果如表18.2所示:
表18.2 常用命令。
| 命令 | CKE | CS | RAS | CAS | WE | 說明 |
| NOP | 1 | 0 | 1 | 1 | 1 | 空命令 |
| ACT | 1 | 0 | 0 | 1 | 1 | 激活命令,選擇Bank地址與行地址 |
| WR | 1 | 0 | 1 | 0 | 0 | 寫命令,開始寫數據 |
| RD | 1 | 0 | 1 | 0 | 1 | 讀命令,開始讀數據 |
| BSTP | 1 | 0 | 1 | 1 | 0 | 停止命令,停止讀寫 |
| PR | 1 | 0 | 0 | 1 | 0 | 預充命令,釋放選擇 |
| AR | 1 | 0 | 0 | 0 | 1 | 刷新命令,刷新內容 |
| LMR | 1 | 0 | 0 | 0 | 0 | 設置命令,設置SDRAM |
l NOP為No Operation,即空命令,除了給空時間以外沒有任何意義。
l ACT為Active,即激活命令,用來選擇某Bank某行。
l WR為Write,即寫命令,通知設備開始寫數據。
l RD為Read,即讀命令,通知設備開始讀數據。
l BSTP為Burst Stop,即停止命令,禁止設備繼續讀寫。
l PR為 Precharge,即預充命令,用來釋放某Bank與某行的選擇。
l AR為Auto Refresh,即刷新命令,用來刷新或者更新數據內容。
l LMR為Load Mode Register,即設置命令,用來配置設備參數。
Verilog則可以這樣描述這些命令,結果如代碼18.1所示:
parameter _INIT = 5'b01111, _NOP = 5'b10111, _ACT = 5'b10011, _RD = 5'b10101, _WR = 5'b10100,
_BSTP = 5'b10110, _PR = 5'b10010, _AR = 5'b10001, _LMR = 5'b10000;
代碼18.1
DQ0~DQ15為數據信號。BA0~1與A0~A12皆為地址信號,其中A0~A12行列共用,,然而地址信號可以指向的范圍,如下計算:
2(2 Bank + 13 Row + 9 Column)× 16 bit = 224× 16 bit
= 1.6777216e7 × 16 bit // 16M × 16 bit
= 2.68435456e8 bit
= 262144 kbit
= 256 Mbits
初始化:
初始化除了就緒SDRAM以外,我們還要設置SDRAM內部的 Mode Register,設置內容內容如表18.3所示:
表18.3 Mode Register的內容。
| Mode Register | ||||||||||||
| A12 | A11 | A10 | A9 | A8 | A7 | A6 | A5 | A4 | A3 | A2 | A1 | A0 |
| 0 | 0 | OP Code | 0 | 0 | CAS Latency | BT | Burst Length |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
如表18.3所示,設置內容必須經由地址信號A12~A0。其中A2~A0表示字讀寫的長度,實驗十八為單字讀寫,所以A2~A0設置為3’b000。A3表示讀寫次序,1’b0表示順序讀寫。A6~A4表示 CAS 延遲(也可以視為讀出延遲),設為 3’b011是為讀出更穩定。A9表示讀寫模式,一般都是設置為1’b0。
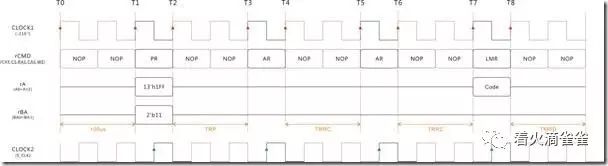
圖18.4 初始化的理想時序圖。
圖18.4是初始化的理想時序圖,其中CLOCK1為 -210°的系統時鐘,CLOCK2為SDRAM的時鐘。rCMD為CKE,CS,RAS,CAS還有WE等命令。rA為A0~A12,rBA為BA0~BA1等地址信號。初始化過程如下所示:
l T0,滿足100us;
l T1,發送PR命令,拉高所有rA與rBA。
l T1半周期,SDRAM讀取。
l T2,滿足TRP;
l T3,發送AR命令。
l T3半周期,SDRAM讀取。
l T4,滿足TRRC,
l T5,發送AR命令。
l T5半周期,SDRAM讀取。
l T6,滿足TRRC,
l T7,發送LMR命令與相關Code(設置內容)。
l T7半周期,SDRAM讀取。
l T8,滿足TMRD。
怎么樣?讀者是不是覺得很單純呢?事后,Verilog則可以這樣描述,結果如代碼18.2所示:
1. case( i )
2.
3. 0: // delay 100us
4. if( C1 == T100US -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
5. else begin C1 <= C1 + 1'b1; end
6.
7. 1: // Send Precharge Command
8. begin rCMD <= _PR; { rBA, rA } <= 15'h3fff; i <= i + 1'b1; end
9.
10. 2: // wait TRP 20ns
11. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
12. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
13.
14. 3: // Send Auto Refresh Command
15. begin rCMD <= _AR; i <= i + 1'b1; end
16.
17. 4: // wait TRRC 63ns
18. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
19. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
20.
21. 5: // Send Auto Refresh Command
22. begin rCMD <= _AR; i <= i + 1'b1; end
23.
24. 6: // wait TRRC 63ns
25. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
26. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
27.
28. 7: // Send LMR Cmd. Burst Read & Write, 3'b011 mean CAS latecy = 3, Sequential, 1 burst length
29. begin rCMD <= _LMR; rBA <= 2'b11; rA <= {3'd0,1'b0,2'd0,3'b011,1'b0, 3'b000}; i <= i + 1'b1; end
30.
31. 8: // Send 2 nop CLK for tMRD
32. if( C1 == TMRD -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
33. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
34.
35. 9: // Generate done signal
36. begin isDone <= 1'b1; i <= i + 1'b1; end
37.
38. 10:
39. begin isDone <= 1'b0; i <= 4'd0; end
40.
41. endcase
代碼18.2
代碼18.2完全按照圖18.4去驅動,讀者只要將i看為T就萬事大吉,其中步驟7發送LMR命令還有設置Code內容。至于步驟8~9則用來產生完成信號。
刷新操作:
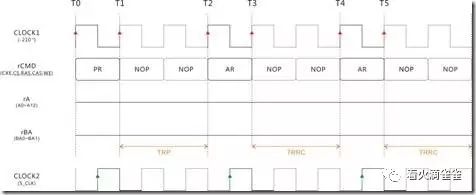
圖18.5 刷新操作的理想時序圖。
所謂定期刷新就是被宮掉的初始化,如圖18.5所示,時序過程如下:
l T0,發送PR命令(拉高所有rA與rBA視喜好而定);
l T0半周期,SDRAM讀取。
l T1,滿足TRP;
l T2,發送AR命令。
l T2半周期,SDRAM讀取。
l T3,滿足TRRC,
l T4,發送AR命令。
l T4半周期,SDRAM讀取。
l T5,滿足TRRC,
Verilog 則可以這樣表示,結果如表18.3所示:
1. case( i )
2.
3. 0: // Send Precharge Command
4. begin rCMD <= _PR; i <= i + 1'b1; end
5.
6. 1: // wait TRP 20ns
7. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
8. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
9.
10. 2: // Send Auto Refresh Command
11. begin rCMD <= _AR; i <= i + 1'b1; end
12.
13. 3: // wait TRRC 63ns
14. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
15. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
16.
17. 4: // Send Auto Refresh Command
18. begin rCMD <= _AR; i <= i + 1'b1; end
19.
20. 5: // wait TRRC 63ns
21. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
22. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
23.
24. 6: // Generate done signal
25. begin isDone <= 1'b1; i <= i + 1'b1; end
26.
27. 7:
28. begin isDone <= 1'b0; i <= 4'd0; end
29.
30. endcase
代碼18.3
除了步驟6~7用來產生完成信號以外,代碼18.3都是據圖18.5描述。SDRAM儲存的內容是非常脆弱的,如果我們不定期刷新內容,該內容有可能會蒸發掉。根據 HY57V2562GTR這只 SDRAM,它的內容儲存周期為 8192 / 64ms,然而定期刷新的計算如下:
64ms / 8192 = 7.8125us
換言之,每隔7.8125微妙就要刷新一次所有內容。
寫操作:
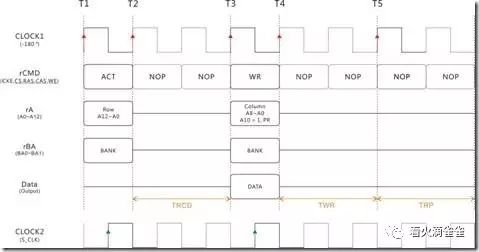
圖18.6 寫操作的理想時序圖。
圖18.6是寫操作的理想時序圖,過程如下:
l T1,發送ACT命令,BANK地址與行地址;
l T1半周期,SDRAM讀取;
l T2,滿足TRCD;
l T3,發送WR命令,BANK地址與列地址,還有寫數據;
l T3半周期,SDRAM讀取
l T4,滿足TWR;
l T5,滿足TRP。
正如前面說過,ACT命令式用來選擇BANK地址與行地址,然而關鍵就在T3。T3除了發送WR命令,列地址,還有些數據以外,A10拉高是為了執行預充電。所謂預充電就是釋放BANK地址,行地址與列地址等的選擇。因此,滿足TWR以后,我們還要滿足TRP的釋放時間,好讓SDRAM有足夠的時間自行釋放選擇。
Verilog則可以這樣描述,結果如代碼18.4所示:
1. case( i )
2.
3. 0: // Set IO to output State
4. begin isOut <= 1'b1; i <= i + 1'b1; end
5.
6. 1: // Send Active Command with Bank and Row address
7. begin rCMD <= _ACT; rBA <= iAddr[23:22]; rA <= iAddr[21:9]; i <= i + 1'b1; end
8.
9. 2: // wait TRCD 20ns
10. if( C1 == TRCD -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
11. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
12.
13. 3: // Send Write cmd with row address, pull up A10 1 clk to PR
14. begin rCMD <= _WR; rBA <= iAddr[23:22]; rA <= { 4'b0010, iAddr[8:0] }; i <= i + 1'b1; end
15.
16. 4: // wait TWR 2 clock
17. if( C1 == TWR -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
18. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end ?
19.
20. 5: // wait TRP 20ns
21. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
22. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
23.
24. 6: // Generate done signal
25. begin isDone <= 1'b1; i <= i + 1'b1; end
26.
27. 7:
28. begin isDone <= 1'b0; i <= 4'd0; end
29.
30. endcase
代碼18.4
根據前面的計算,BA1~BA0再加上 RA12~A0與 CA8~A0以后,一共有24位寬,詳細的位分配如表18.4所示:
表18.4 Addr的位分配。
| 位分配 | 地址內容 |
| Addr[23:22] | BANK地址 |
| Addr[21:9] | 行地址 |
| Addr[8:0] | 列地址 |
如代碼18.4所示,步驟用來設置IO口為輸出。步驟1為rA賦值行地址,步驟3則為rA賦值列地址,并且拉高A10以示自行預充電。步驟6~7用來產生完成信號。
讀操作:
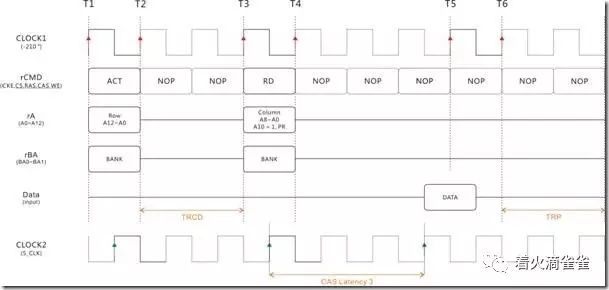
圖18.7 讀操作的理想時序。
圖18.7為讀操作的理想時序,大致過程如下:
l T1,發送ACT命令,BANK地址與行地址;
l T1半周期,SDRAM讀取;
l T2,滿足TRCD;
l T3,發送RD命令,BANK地址與列地址;
l T3半周期,SDRAM讀取命令。
l T4,滿足 CAS Latency。
l T5,讀取數據。
l T6,滿足TRP。
讀操作與寫操作的過程大同小異,除了WR命令變成RD命令以外,A10為1同樣表示自行預充電,余下就是滿足CAS Latency。好奇的同學一定會覺得疑惑,為何CL 為3呢?其實沒什么,只是直感上覺得3這個數字比較順眼一點。注意CL的計算方式是讀取RD命令以后開始計算。
Verilog可以這樣描述,結果如代碼18.5所示:
1. case( i )
2.
3. 0:
4. begin isOut <= 1'b0; D1 <= 16'd0; i <= i + 1'b1; end
5.
6. 1: // Send Active command with Bank and Row address
7. begin rCMD <= _ACT; rBA <= iAddr[23:22]; rA <= iAddr[21:9]; i <= i + 1'b1; end
8.
9. 2: // wait TRCD 20ns
10. if( C1 == TRCD -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
11. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
12.
13. 3: // Send Read command and column address, pull up A10 to PR.
14. begin rCMD <= _RD; rBA <= iAddr[23:22]; rA <= { 4'b0010, iAddr[8:0]}; i <= i + 1'b1; end
15.
16. 4: // wait CL 3 clock
17. if( C1 == CL -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
18. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
19.
20. 5: // Read Data
21. begin D1 <= S_DQ; i <= i + 1'b1; end
22.
23. 6: // wait TRP 20ns
24. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
25. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
26.
27. 7: // Generate done signal
28. begin isDone <= 1'b1; i <= i + 1'b1; end
29.
30. 8:
31. begin isDone <= 1'b0; i <= 4'd0; end
32.
33. endcase
代碼18.5
代碼18.5完全根據圖18.7描述,除了步驟7~8用于產生完成信號以外。SDRAM的基本操作大致上就是這樣而已,完后我們便可以開始建模了。
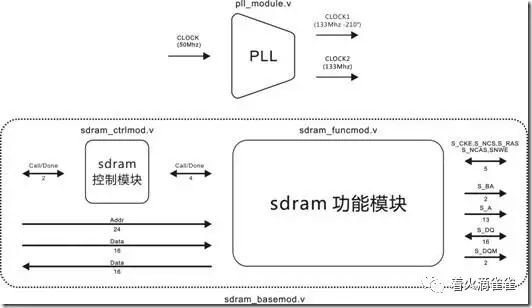
圖18.8 SDRAM基礎模塊的建模圖。
圖18.8是SDRAM基礎模塊的建模圖,SDRAM基礎模塊的內容包括SDRAM控制模塊,還有SDRAM功能模塊。外圍的PLL模塊應用頻率為133Mhz向左位移210°的CLOCK1,還有133Mhz的CLOCK2。CLOCK1用作系統時鐘,CLOCK用作SDRAM時鐘。如果PLL模塊硬要分類的話,它應該屬于特殊性質的即時類吧!?
SDRAM控制模塊主要負責一些操作的調度,左邊2位Call/Done由外部調用,其中 [1]為寫操作 [0]為讀操作;右邊4位Call/Done為調用SDRAM功能模塊,其中 [3]為寫操作 [2]為讀操作 [1]為刷新 [0]為初始化。SDRAM功能模塊的右邊是驅動SDRAM硬件資源的頂層信號,左邊的問答信號被控制模塊調用以外,地址信號還有數據信號都直接連接外部。
審核編輯:劉清
-
FPGA
+關注
關注
1629文章
21729瀏覽量
602997 -
SDRAM
+關注
關注
7文章
423瀏覽量
55205 -
Verilog
+關注
關注
28文章
1351瀏覽量
110074 -
鎖存器
+關注
關注
8文章
906瀏覽量
41496 -
時鐘源
+關注
關注
0文章
93瀏覽量
15956
原文標題:Fpga Verilog SDRAM模塊① — 單字讀寫
文章出處:【微信號:zhuyandz,微信公眾號:FPGA之家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
關于FPGA讀寫SDRAM問題?
求助 關于片外SDRAM讀寫問題
【每周FPGA案例】至簡設計系列- SDRAM讀寫控制器
如何使用Verilog實現基于FPGA的SDRAM控制器?
ref sdr sdram verilog代碼
使用Verilog實現基于FPGA的SDRAM控制器
基于FPGA的高速SDRAM控制器的視頻應用
FPGA讀寫SDRAM的實例和SDRAM的相關文章及一些SDRAM控制器設計論文
基于SDRAM控制器軟核的Verilog設計







 工商網監
工商網監
評論