 七軸開源協作機械臂myArm視覺跟蹤技術!
七軸開源協作機械臂myArm視覺跟蹤技術!
引言
ArUco標記是一種基于二維碼的標記,可以被用于高效的場景識別和位置跟蹤。這些標記的簡單性和高效性使其成為機器視覺領域的理想選擇,特別是在需要實時和高精度跟蹤的場景中。結合機器學習和先進的圖像處理技術,使用ArUco標記的機械臂系統可以實現更高級的自動化功能,如精確定位、導航和復雜動作的執行。
本案例旨在展示結合ArUco標記和機械臂運動控制技術,實現對機械臂的高精度控制和姿態跟蹤。通過分析和解釋腳本的不同組成部分,本文將探討如何通過機器視覺識別技術和復雜的數據處理算法,來增強機械臂的操作能力。此外,還將展示機械臂在捕捉和響應環境變化方面的能力,以及如何通過編程和算法優化來提高整體系統的效率和準確性。
技術概述
機械臂-myArm 300 Pi
myArm 300 Pi是大象機器人最新出的一款七自由度的機械臂,搭載樹莓派4B 4g芯片,專門為機器人定制了ubuntu mate 20.04操作系統。myArm提供了7自由度的靈活性,使它超越6自由度機器人,讓機器人手臂的移動可以如同人類手臂一樣靈活。
myArm內置接口可以進行超高難度的肘關節姿態變換,在實踐教學中,可以用于機器人姿態研究、機器人運動路徑規劃學習、機器人冗余自由度的管理和利用、正逆運動學、ROS機器人開發環境、機器人應用開發、編程語言開發和底層數據處理等多種機器人相關的學科教育。開放了樹莓派4B開發板和末端Atom近乎100%的硬件接口,可以搭配用戶個人的樹莓派4B及M5Atom的周邊配件,進行個性化的場景開發,以滿足不同用戶的創意開發。
ArUco 碼標記
ArUco 標記是一種二維條形碼系統,它在機器視覺領域中被廣泛用于標記檢測和空間定位。這些標記由黑白圖案組成,通常呈正方形,中心包含一個獨特的二進制模式,使其能夠被計算機視覺系統快速而準確地識別。


ArUco 標記的特點:
唯一性:每個 ArUco 標記具有獨特的編碼,允許識別系統輕松區分不同的標記
低成本:與其他高級定位系統相比,ArUco 標記不需要昂貴的設備或復雜的安裝,可以直接打印ArUco標記。
定位和導航:在機器視覺系統中,ArUco 標記被用作參考點,幫助機械臂或移動機器人定位自身位置或導航至特定位置。
姿態估計:通過分析攝像頭捕捉到的 ArUco 標記圖像,系統能夠計算出標記相對于攝像頭的位置和方向(即姿態)。這對于精確控制機械臂或其他自動化設備至關重要。
相關軟件和庫
操作系統:Ubuntu mate 20.04
編程語言:Python 3.9+
主要功能包:pymycobot,OpenCV,numpy,math
pymycobot-控制機械臂運動的庫,多種控制接口
OpenCV- 提供了豐富的圖像處理和視頻分析功能,包括對象檢測,面部識別,運動跟蹤,圖形濾波等
Numpy-是一個核心科學計算哭,它提供了高性能的多維數組對象和工具,用于處理大量數據。
Math-提供了一系列基本的數學運算函數和常量,如三角函數、指數和對數函數、各種數學常數等。
系統設計與實現
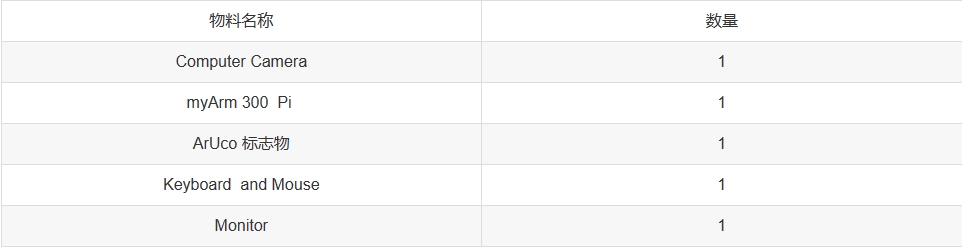
物料準備

機械臂的姿態跟蹤
定義:姿態跟蹤通常指的是監測和記錄一個物體在三維空間中的精確位置(平移)和方向(旋轉),即其“姿態”。
技術應用:在機械臂的應用中,姿態跟蹤涉及到實時監控和控制機械臂自身的各個關節和末端執行器的精確位置和方向。這通常需要復雜的傳感器系統和算法,以實現高精度的控制。
用途:姿態跟蹤對于執行精密的操作任務非常關鍵,如在制造業中的裝配、焊接、在醫療領域中的外科手術輔助
項目組成部分
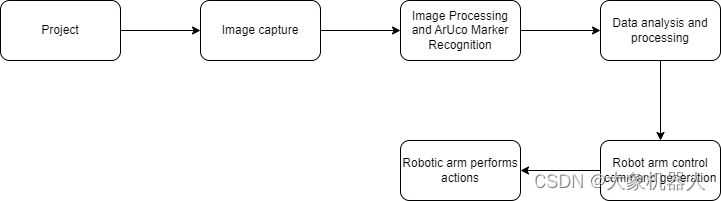
整個系統的架構主要分為以下幾個部分:
1.硬件組成:機械臂,usb攝像頭以及使用到的設備。
2.軟件和控制系統:通過OpenCV識別ArUco 標記,控制算法,機械臂運動控制的系統來實現案例。
3.數據流程:用于圖像的捕捉,圖像處理,數據分析和轉換,機械臂的執行。
功能實現
圖像捕捉
使用到OpenCV捕獲圖像的方法
# 初始化攝像頭 cap = cv2.VideoCapture(0) # 0代表默認攝像頭的序號 #讀取圖像幀 ret, frame = cap.read() #顯示圖像 cv2.imshow('video", frame) def capture_video(): cap = cv2.VideoCapture(0) if not cap.isOpened(): print("Can't open camera") return try: while True: ret, frame = cap.read() if not ret: print("Can't read the pic from camera") break cv2.imshow('Video Capture', frame) # enter 'q' quit if cv2.waitKey(1) & 0xFF == ord('q'): break finally: cap.release() cv2.destroyAllWindows()
圖像處理與ArUco標記識別
對攝像頭捕獲的圖像進行處理以及對ArUco的標記碼進行識別
#檢測ArUco標記 def detect_marker_corners(self, frame: np.ndarray) -> Tuple[NDArray, NDArray, NDArray]: # 灰度化 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) corners : Any ids : Any rejectedImgPoints : Any corners, ids, rejectedImgPoints = self.detector.detectMarkers(gray) return corners, ids, rejectedImgPoints #在圖像中標記出ArUco碼,并且在每個標志上繪制坐標軸 def draw_marker(self, frame: np.ndarray, corners, tvecs, rvecs, ids) -> None: # cv2.aruco.drawDetectedMarkers(frame, corners, None, borderColor=(0, 255, 0)) cv2.aruco.drawDetectedMarkers(frame, corners, ids, borderColor=(0, 200, 200)) for i in range(len(ids)): corner, tvec, rvec, marker_id = corners[i], tvecs[i], rvecs[i], ids[i] cv2.drawFrameAxes(frame, self.mtx, self.dist, rvec, tvec, 30, 2) while True: ret, frame = cap.read() corners, ids, rejectedImgPoints = aruco_detector.detect_marker_corners(frame) if ids is not None: detector.draw_marker(frame, corners, tvecs, rvecs, ids) ArucoDetector.draw_position_info(frame, corners, tvecs) cv2.imshow('Video Capture', frame) # enter 'q' quit if cv2.waitKey(1) & 0xFF == ord('q'): break
數據解析與處理
因為該案例要做的是姿態跟蹤,所以我們在檢測ArUco標記的時候得檢測該姿態,標注每個旋轉向量(rvec)和平移向量(tvecs),這些向量描述了標記相對于攝像頭的三位位置和方向。
def estimatePoseSingleMarkers(self, corners): """ This will estimate the rvec and tvec for each of the marker corners detected by: corners, ids, rejectedImgPoints = detector.detectMarkers(image) corners - is an array of detected corners for each detected marker in the image marker_size - is the size of the detected markers mtx - is the camera matrix distortion - is the camera distortion matrix RETURN list of rvecs, tvecs, and trash (so that it corresponds to the old estimatePoseSingleMarkers()) """ marker_points = np.array([[-self.marker_size / 2, self.marker_size / 2, 0], [self.marker_size / 2, self.marker_size / 2, 0], [self.marker_size / 2, -self.marker_size / 2, 0], [-self.marker_size / 2, -self.marker_size / 2, 0]], dtype=np.float32) rvecs = [] tvecs = [] for corner in corners: corner : np.ndarray retval, rvec, tvec = cv2.solvePnP(marker_points, corner, self.mtx, self.dist, None, None, False, cv2.SOLVEPNP_IPPE_SQUARE) if retval: rvecs.append(rvec) tvecs.append(tvec) rvecs = np.array(rvecs) tvecs = np.array(tvecs) (rvecs - tvecs).any() return rvecs, tvecs
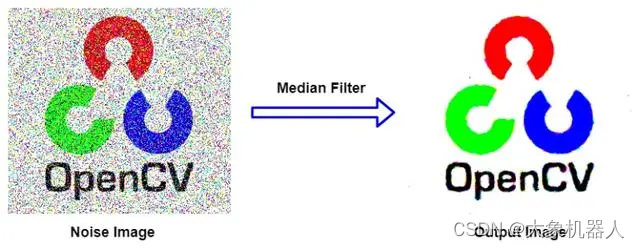
捕獲數據的時候會大量的數據,為了提高檢測的準確性需要使用濾波器來進行對數據的處理。
用到了中值濾波器,平均濾波器還有二階濾波器。
中值濾波器:中值濾波器非常有效于去除所謂的“椒鹽”噪聲,同時保持信號的邊緣信息。它在圖像處理中常用于去除噪點,同時不會使圖像模糊。
平均濾波器:平均濾波器常用于去除隨機噪聲、平滑和軟化數據。在圖像處理中,它可以用于平滑圖像,但可能會導致邊緣信息丟失,可以看到圖像處理過后會模糊一些。
二階濾波器:精確控制信號頻率成分時使用,例如在信號處理和控制系統中,用于減少振蕩和提高穩定性,特別是在姿態估計和精確運動控制中。
def median_filter(pos, filter, filter_len):
if not np.any(filter):
# 如果濾波器為空,用pos填充濾波器
filter[:] = pos
# 將pos加入濾波器
filter[filter_len - 1] = pos
# 移動濾波器中的元素
for i in range(filter_len - 1):
filter[i] = filter[i + 1]
# 計算中值并存儲到輸出數組中
output = np.median(filter)
return output
def Average_filter(pos, filter, filter_len):
if not np.any(filter):
# 如果濾波器為空,用pos填充濾波器
filter[:] = pos
# 將pos加入濾波器
filter[filter_len - 1] = pos
# 移動濾波器中的元素
for i in range(filter_len - 1):
filter[i] = filter[i + 1]
# 計算中值并存儲到輸出數組中
output = np.mean(filter)
return output
def twoorder_filter_single_input(input):
global prev1
global prev2
global prev_out1
global prev_out2
if np.array_equal(prev1, np.zeros(3)):
output, prev1, prev_out1 = input, input, input
return output
if np.array_equal(prev2, np.zeros(3)):
prev2, prev_out2 = prev1, prev_out1
output, prev1, prev_out1 = input, input, input
return output
fc = 20 # Hz 截止頻率 (設計的濾波器頻率)
fs = 100 # Hz 斬波頻率 (采樣頻率)
Ksi = 10 # 品質因數
temp1 = (2 * 3.14159 * fc)**2
temp2 = (2 * fs)**2
temp3 = 8 * 3.14159 * fs * Ksi * fc
temp4 = temp2 + temp3 + temp1
K1 = temp1 / temp4
K2 = 2 * K1
K3 = K1
K4 = 2 * (temp1 - temp2) / temp4
K5 = (temp1 + temp2 - temp3) / temp4
output = K1 * prev2 + K2 * prev1 + K3 * input - K4 * prev_out2 - K5 * prev_out1
# 更新全局變量
prev2, prev1, prev_out2, prev_out1 = prev1, input, prev_out1, output
return output
從檢測到的標記(如ArUco標記)中提取機械臂或相機的姿態信息,并對提取的角度數據進行濾波處理,最終獲得目標的坐標。
機械臂控制命令生成
在機械臂運動控制的方式上,我們得設置它的運動模式
# Set end coordinate system 1-tool arm.set_end_type(1) time.sleep(0.03) # Set tool coordinate system arm.set_tool_reference([-50, 0, 20, 0, 0, 0]) time.sleep(0.03) # Set command refresh mode arm.set_fresh_mode(0) time.sleep(0.03)
在獲取到目標坐標,就得發送給機械臂去執行命令。
from pymycobot import MyArm
arm = MyArm("COM11",debug=False)
# 發送坐標控制機械臂運動
arm.send_coords(target_coords, 10, 2)
關鍵技術點
關鍵的技術點主要在幾個方面:
ArUco 檢測:
ArUco 標記的檢測是整個系統運行的基礎。通過攝像頭識別這些標記,系統能夠獲取關于標記位置和方向的關鍵信息。這些信息對于機械臂的精確控制和操作至關重要,尤其是在需要精確位置調節的應用中,如在自動化、機器人編程和增強現實中。
使用圖像處理技術,用openCV庫從攝像頭捕獲的圖像中識別標記,并且提取他們的位置和姿態信息。
濾波技術:
在處理圖像數據或機械臂傳感器數據時,濾波技術是保證數據質量和系統穩定性的關鍵。它們幫助去除數據中的噪聲和誤差,從而提高系統的準確性和可靠性。
機械臂控制:
在開始實現機械臂姿態跟蹤前提,需要設置其運動模式。確保機械臂的運動與預期任務相匹配、提高操作的精度和可靠性非常關鍵。通過調整坐標系統、工具參考點和指令執行方式,可以使機械臂更加適應特定的操作環境和任務需求。
https://twitter.com/i/status/1733806097050558951
總結
在該項目中,深入了解圖像處理和機器視覺的原理,特別是ArUco標記檢測和位姿最終方面。可以掌握各種濾波技術的應用,理解它們在提高數據質量和系統性能中的重要。總而言之,該項目可以實踐應用各個方面。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28466瀏覽量
207313 -
開源
+關注
關注
3文章
3363瀏覽量
42535 -
python
+關注
關注
56文章
4797瀏覽量
84752 -
機械臂
+關注
關注
12文章
515瀏覽量
24609
發布評論請先 登錄
相關推薦
OrangePi AIpro應用:機械臂應用開發指南

工業機器人和機械臂的設計、功能和應用有哪些區別?
開源六軸協作機器人myCobot 320結合人臉表情識別情緒!


機器視覺控制軸運動原理是什么
大象機器人開源協作機械臂機械臂接入GPT4o大模型!

國產Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
大象機器人開源協作機械臂myCobot 630 全面升級!
大象機器人發布智能遙操作機械臂組合myArm M&C,加速具身智能研究與發展!

機械臂技術的前沿探索:年度案例回顧!
如何去提升機械臂的位置控制性能?

【先楫HPM5361EVK開發板試用體驗】(原創)5.手把手實戰AI機械臂
【國產FPGA+OMAPL138開發板體驗】(原創)2.手把手玩轉游戲機械臂
大象機器人六軸協作機械臂myCobot 320 進行手勢識別!

使用ChatGPT學習大象機器人六軸協作機械臂mechArm!






 工商網監
工商網監
評論