

1. 雷達的基本概念
無線電探測及測距(Radio Detection and Ranging), 發射電磁波并接收目標反射的回波信號,通過對比發射信號與回收信號,獲取目標的位置、速度等信息。
1.1 毫米波雷達分類
雷達的分類
? 所發射電磁波的頻段,決定了雷達的基本性能特點
? 超視距雷達、微波雷達、毫米波雷達、激光雷達、…
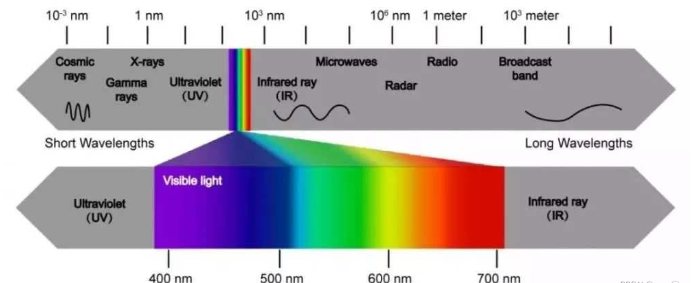
?按照用途分類:軍用,氣象,導航,車載
?按照波長分類:米,分米,厘米,毫米
?按照波形分類:脈沖,連續波
按照波長和用途分類
?長波雷達(米,分米),分辨率低,穿透性強
?一般用于廣播,軍事預警,衛星通訊等
?短波雷達(厘米,毫米),分辨率高,穿透性差
?一般用于測繪,短程通訊,車載應用等
按照波形分類
?脈沖雷達
?通過脈沖發送和接收的時間差來確定目標的距離
?不能確定目標的速度
?連續波雷達
?發射信號在時間上是連續的
?發射信號的頻率是隨著時間變化的(調頻連續波)
1.2 信息的傳輸
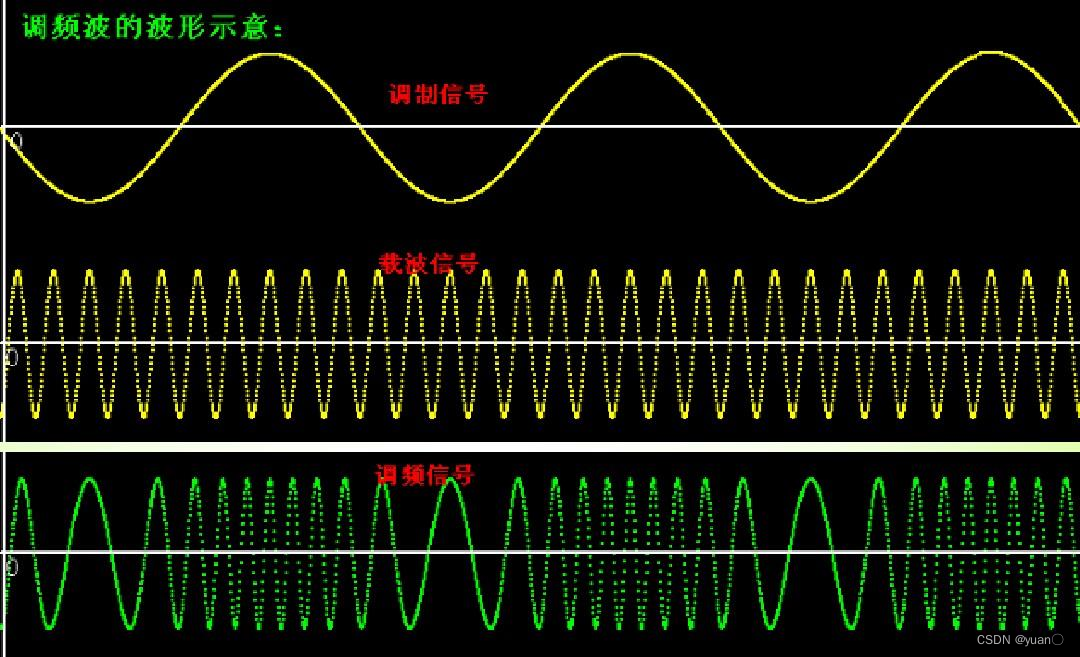
調制:將調制信號(待傳輸信息)混合到載波信號(起到載運作用的信號)的過程,可分為調頻,調幅,調相。 解調:相反的過程,即從混合信號中恢復出待傳輸信息。 帶寬:調制信號頻譜的寬度,帶寬高有利于傳輸更多數據。
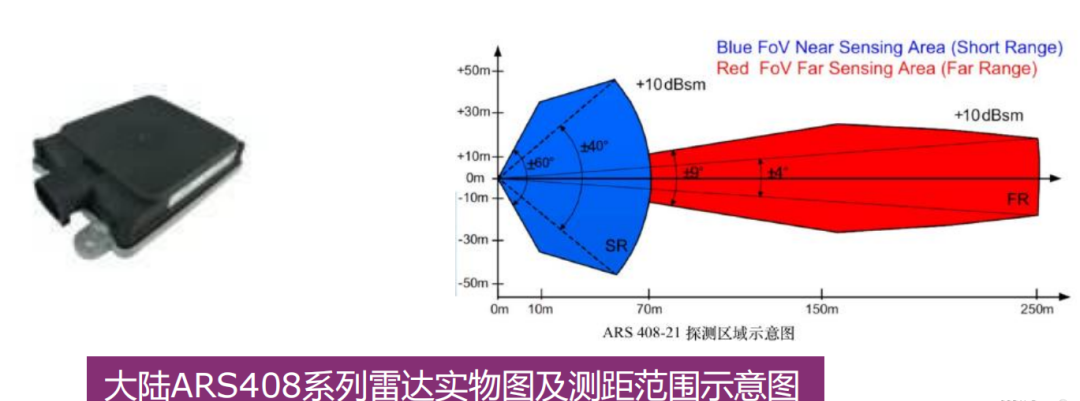
?毫米波雷達使用的電磁波波長介于1-10mm,波長短、頻段寬,比較 容易實現窄波束,雷達分辨率高,不易受干擾
?早期被應用于軍事領域,隨著雷達技術的發展與進步,毫米波雷達傳 感器開始應用于汽車電子、無人機、智能交通等多個領域。
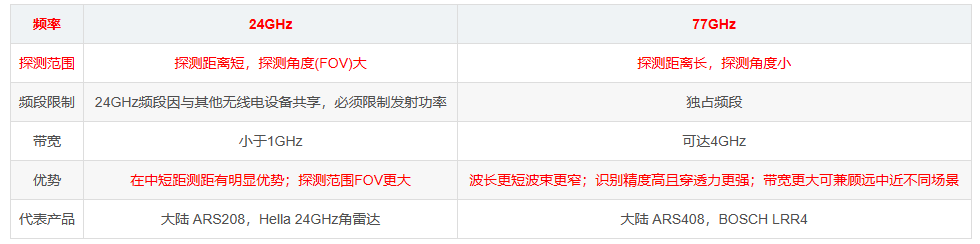
1.3毫米波雷達的信號頻段
1.4 毫米波雷達工作原理
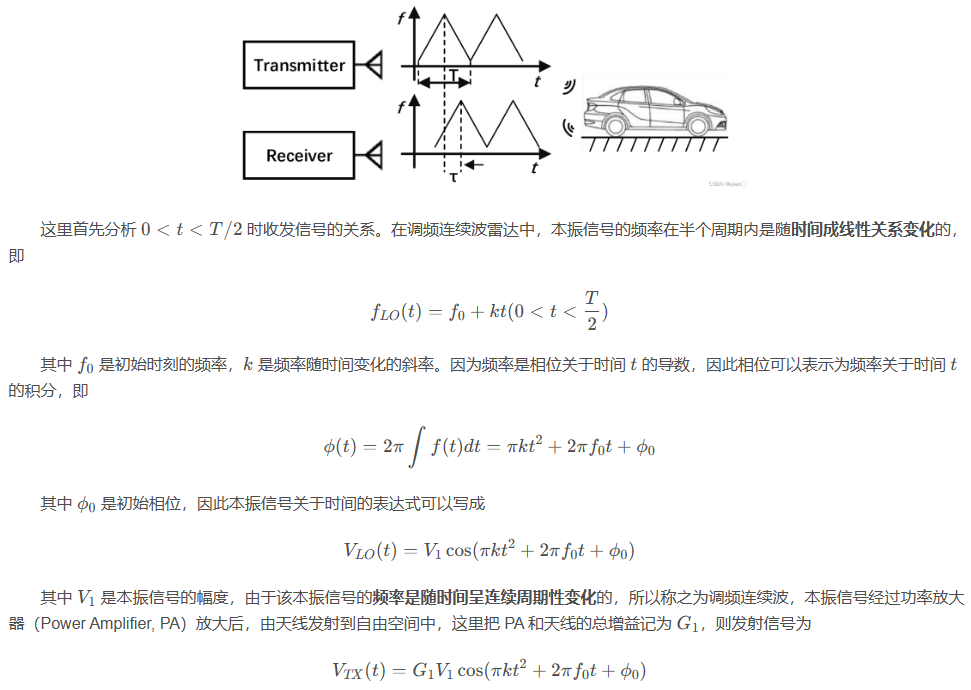
在車載毫米波雷達中,目前主要有三種調制方案:調頻連續波(FrequencyModulated Continuous Wave, FMCW),頻移鍵控(Frequency Shift Keying, FSK)以及相移鍵控(Phase Shift Keying, PSK)。 主流車載毫米波雷達所采用的的調制信號為調頻連續波FMCW。
其基本原理是在發射端發射一個頻率隨時間變化的信號,經目標反射后被接收機接收,通過反射信號和接收信號之間的混頻,得出兩個信號的頻率差,隨后通過電磁波傳播公式和多普勒效應公式求出目標距離和速度。 測距測速是通過分析發射和接收的調頻連續之間的區別來實現。 測量角度是通過計算不同天線單元之間的延時差來計算。
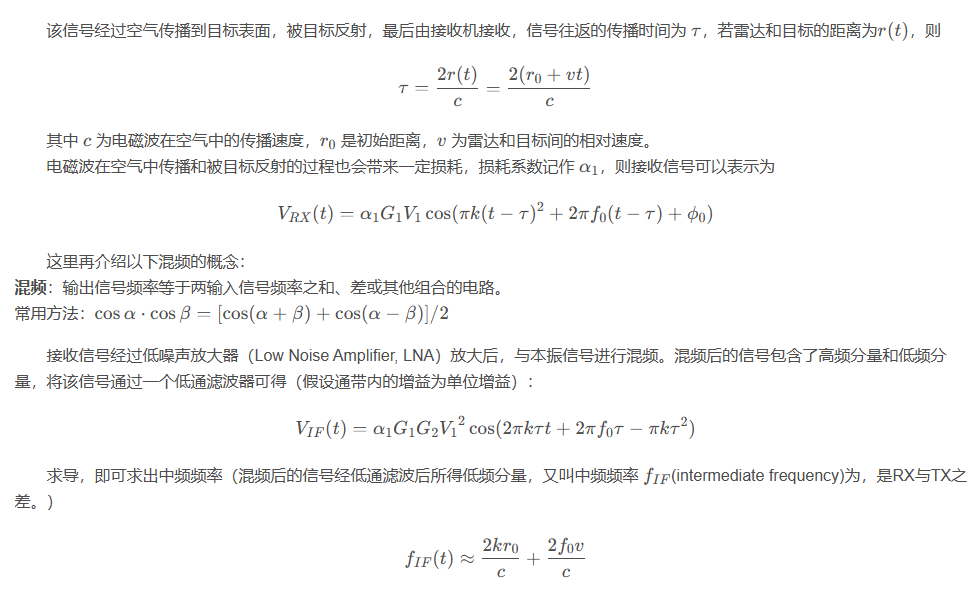
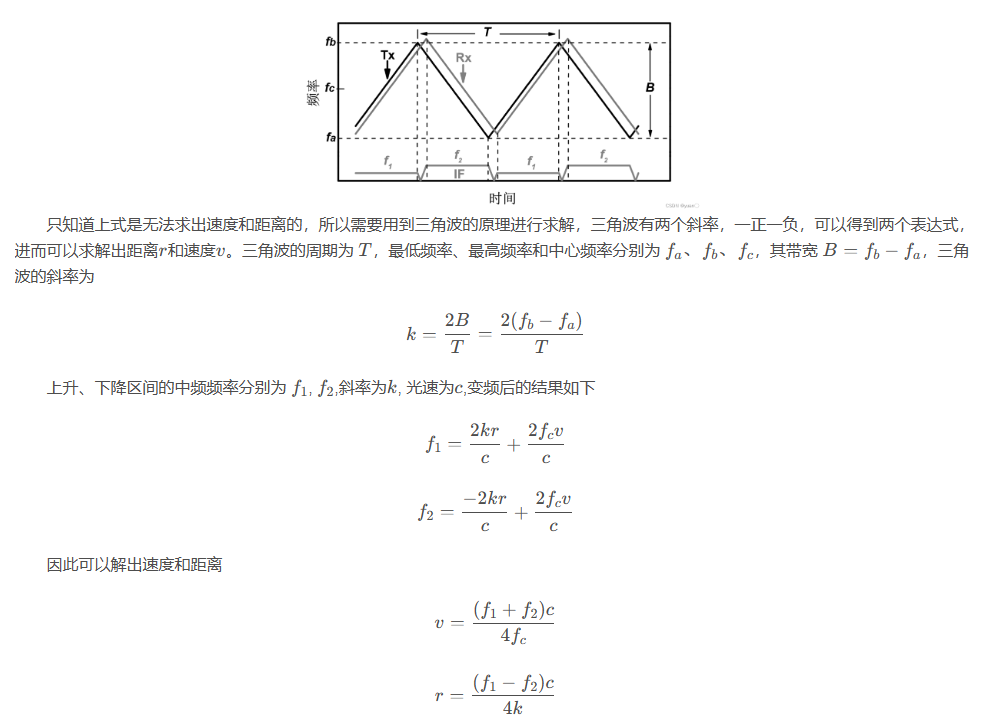
1.4.1 毫米波雷達測速測距的數學原理
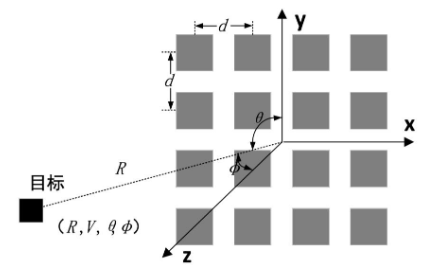
1.4.2 毫米波雷達測角度的數學原理
一對收發機所采集到的信號是不具備角度信息的, 因此需要采用多路發射多路接收的架構,或者采用相控陣架構。 短波長和小天線孔徑就很有必要了,短波長意味著波束更窄,能量更加集中;更小的孔徑尺寸意味著系統上能集成更多的天線單元,這些都有利于提高角分辨率。
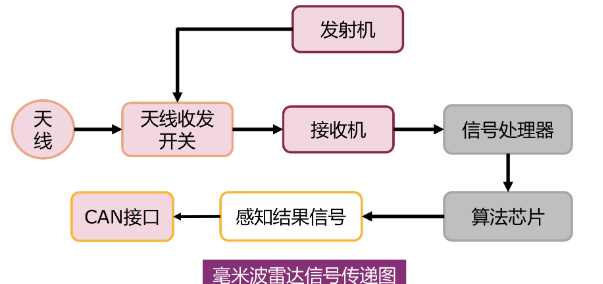
1.4.3 硬件接口
?天線向外發射毫米波,接收目標反射信號
?信號處理器完成回波信號處理
?算法芯片完成原始點云目標的進一步處理
?CAN接口完成毫米波處理數據的發送以及配置信息的輸入
1.4.4 關鍵零部件
毫米波雷達的天線接發系統
? PCB板實現MMIC(單片微波集成電路)
? 包括接收電路單元,負責發射與接收連續調頻波
毫米波雷達的信號處理芯片
? 包含信號處理器和算法芯片
? 完成回波信號處理與目標感知結果的計算
1.4.5 數據的協議與格式
傳輸層協議:網口UDP/IP協議,或者CAN接口
?控制器局域網總線(CAN,Controller Area Network)是一種用 于實時應用的串行通訊協議總線
數據格式:按照CAN編碼機制,確定雷達的輸入配置信息與輸出數據格式 數據格式:按照CAN編碼機制,確定雷達的輸入配置信息與輸出數據格式
?CAN報文
13個字節 信息段(5Byte)+數據段(8Byte) 數據段按照事先規定好的報文規則進行編碼和解碼
?CAN報文解析使用方法

數據內容:不同內容使用不同的CAN協議 Cluster類型:包含3類message:
?Header(數量n)
?+n個數據消息(距離/角度/速度)
?+n個質量消息(數據的方差)(1≤n ≤ 256)
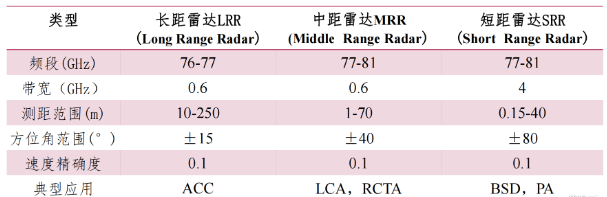
1.5車載毫米波雷達的重要參數
常見參數:
?測量性能 測距范圍
距離/水平角/速度 分辨率 (可對兩個物體進行區分的最小單位)
距離/水平角/速度 精度 (測量不確定性)
?操作條件 雷達發射功率、傳輸能力、電源、功耗、操作溫度
1.6 車載毫米波雷達的三種典型應用
毫米波雷達具有全天侯適應性,是高級別自動駕駛實現必備的環境感知傳感器。 77GHz及79GHz雷達是未來車載毫米波雷達的發展方向,國內正處于快速追趕時期。

2. FMCW雷達的工作流程
PS:此部分主要是為了簡單理解FMCW雷達的工作原理,是對第一章內容的補充。
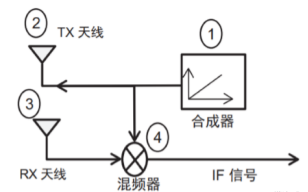
總結一下,FMCW雷達的工作流程:
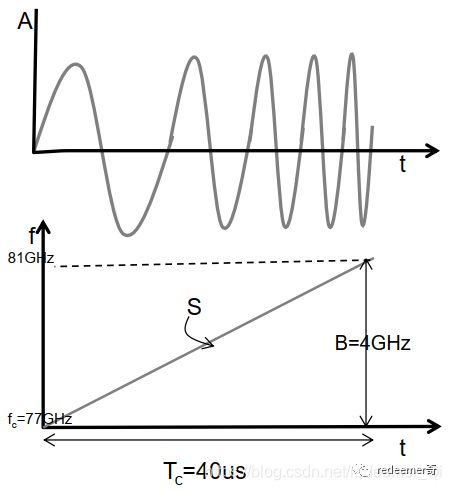
?合成器生成一個線性調頻信號 ;
?發射天線( TX )發射線性調頻信號;
?接收天線( RX )捕獲目標對線性調頻信號的反射;
?混頻器將RX和TX信號合并到一-起,生成一個中頻(IF )信號。
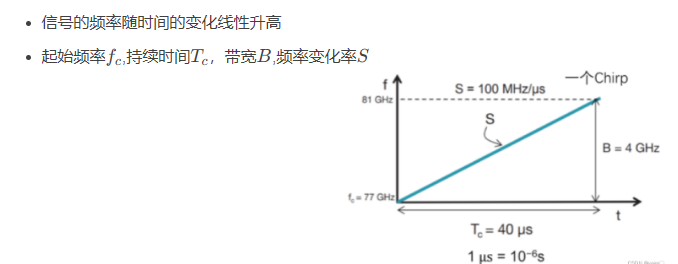
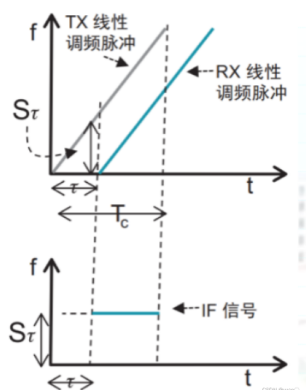
2.1 線性調頻脈沖信號
對于一個脈沖信號
2.2 混頻器
作用:將TX和RX的信號合并生成一個新的信號IF TX發射信號:
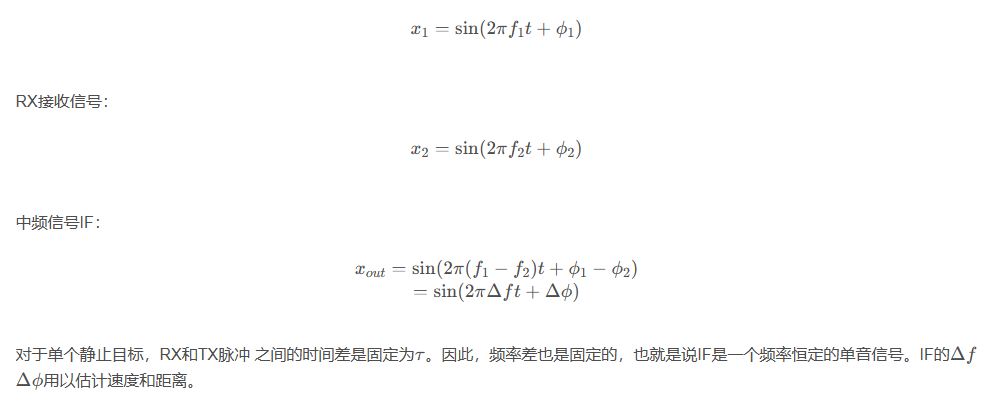
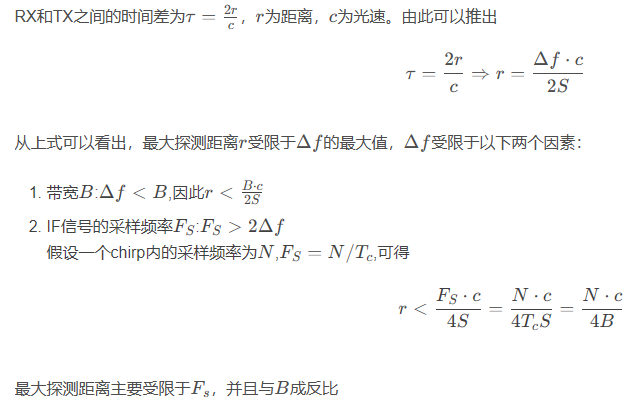
2.3單目標距離估計
PS:此處估計為了簡要分析,雷達與目標的相對速度為0。
2.4多目標距離估計

圖片來源
?來自三個目標的RX接收信號,每個信號有不同的延時,延時和與目標的距離成正比。
?不同的RX接收信號轉化為多個單音信號,每個信號的頻率差是恒定的(fb1 , fb2 , fb3 )
?混頻器輸出的是多個單音信號的疊加。對該信號進行FFT操作,會產生一個具有不同的峰值的頻譜,每個峰值表示在特定距離處的目標。
距離分辨率是指雷達能區分兩個不同目標的最小距離。傅里葉變換理論指出:觀測時間窗口T,可以分辨間隔超過1 / T Hz的頻率分量。 因此,兩個目標反射信號頻率差的差值需要滿足。
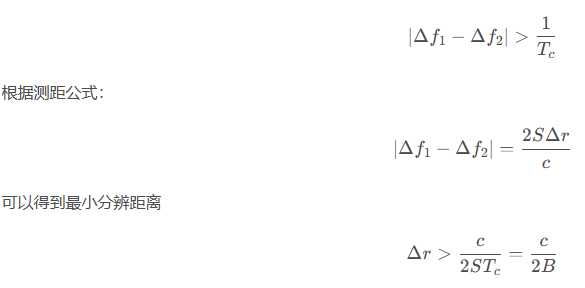
因此,從式子中我們可以得到提高分辨率的方法:提高帶寬B,延長chirp信號。
2.5 單目標速度估計
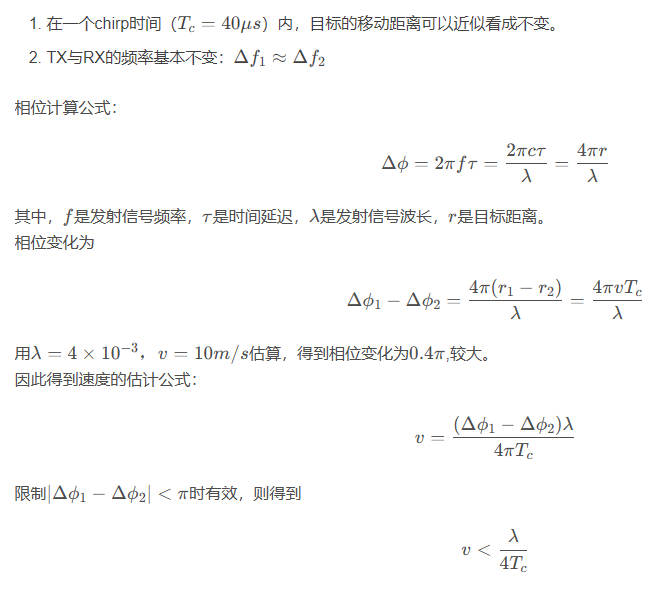
FMCW雷達會發射兩個間隔Tc的線性調頻脈沖(兩個Chirp) ,相應的IF信號為:
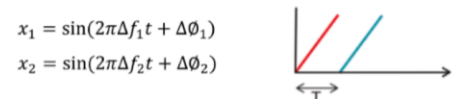
在這里有兩個近似條件:

2.6多目標速度估計
發射一組M個等間隔線性調頻脈沖(M個Chirp),對N這個維度進行FFT處理(距離FFT) ,得到M個頻譜。

?如果目標距離相同,速度不同,M個頻譜的峰值相同,但相位不同,包含來自多個目標的相位成分。
?如果目標距離不同,速度不同,M個頻譜都會出現多個峰值,每個峰值的相位都不同。 對M這個維度進行FFT處理(速度FFT) ,可以分離多個相位分量。

速度分辨率:雷達能區分兩個不同目標的最小速度差。
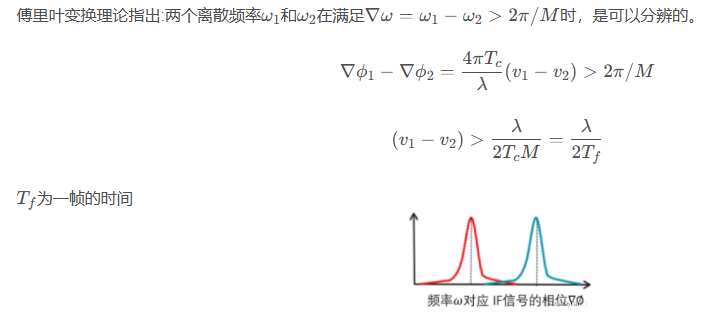
提高速度分辨率的方法:提高幀時間,Chirp時 間固定的話等價于增加Chirp個數。

審核編輯:劉清
-
接收機
+關注
關注
8文章
1218瀏覽量
54247 -
無線電
+關注
關注
60文章
2162瀏覽量
117685 -
電磁波
+關注
關注
21文章
1478瀏覽量
54453 -
激光雷達
+關注
關注
971文章
4197瀏覽量
192013 -
毫米波雷達
+關注
關注
107文章
1083瀏覽量
65181
原文標題:毫米波雷達基本原理深度解析
文章出處:【微信號:中科聚智,微信公眾號:中科聚智】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
車載毫米波雷達的技術原理與發展
車載毫米波雷達的原理是什么?
ADAS系統無人駕駛的眼睛毫米波雷達
FMCW毫米波雷達的基本原理





 工商網監
工商網監

評論