
CAN總線通訊協議由德國博世于上世紀80年代發明,第一個使用CAN總線通訊協議的量產車型是1991年的奔馳S級轎車,至今CAN總線依舊是車內主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開始進一步升級,2003年CAN總線升級為HS CAN,但還是第一代技術。2011年第二代CAN總線CAN-FD開始研發,2015年CAN FD標準即ISO11898發布,2019年,CAN FD SIC(SignalImprovement Capability)信號增強版標準CiA(CAN in Automation)601-4發布,2021年CAN FD的輕量級版本CAN FD Light 標準CiA 604-1發布,2021年12月,第三代CAN總線即CAN XL標準CiA 610-1發布,目前CAN XL的標準還未完全完成。這些新標準最終將轉換為ISO11898-2標準。
CAN總線發展歷程
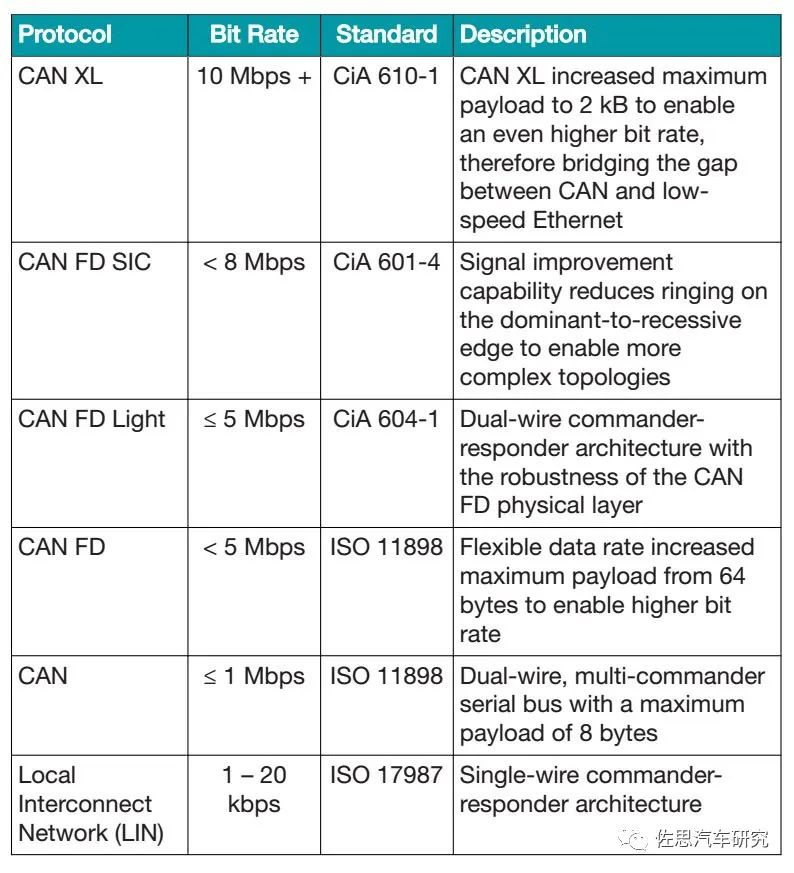
來源:德州儀器
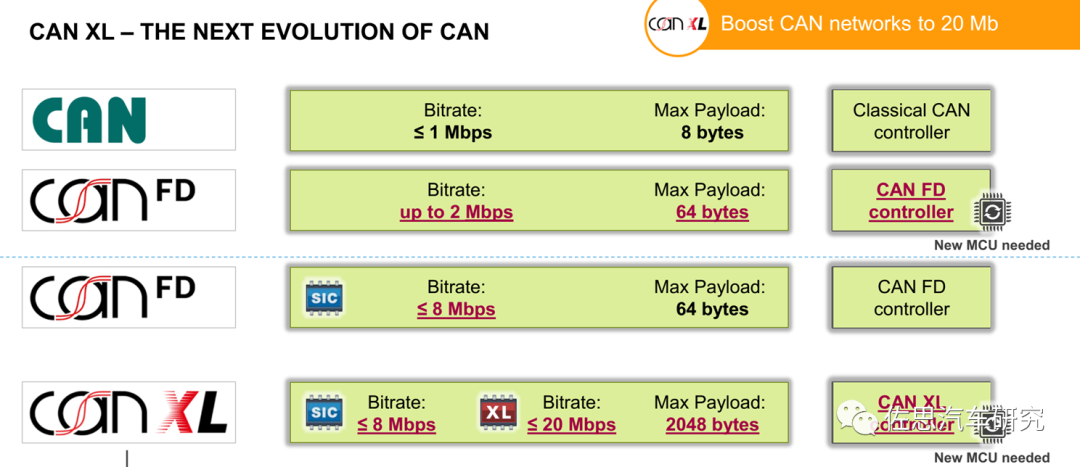
圖片來源:NXP
重大升級需要新的MCU對應,CAN總線的升級領域主要是Payload,從最初的8bytes升級到2048bytes,傳輸效率大大提升,以太網每幀最大是1518bytes,CAN XL已經超過了以太網。
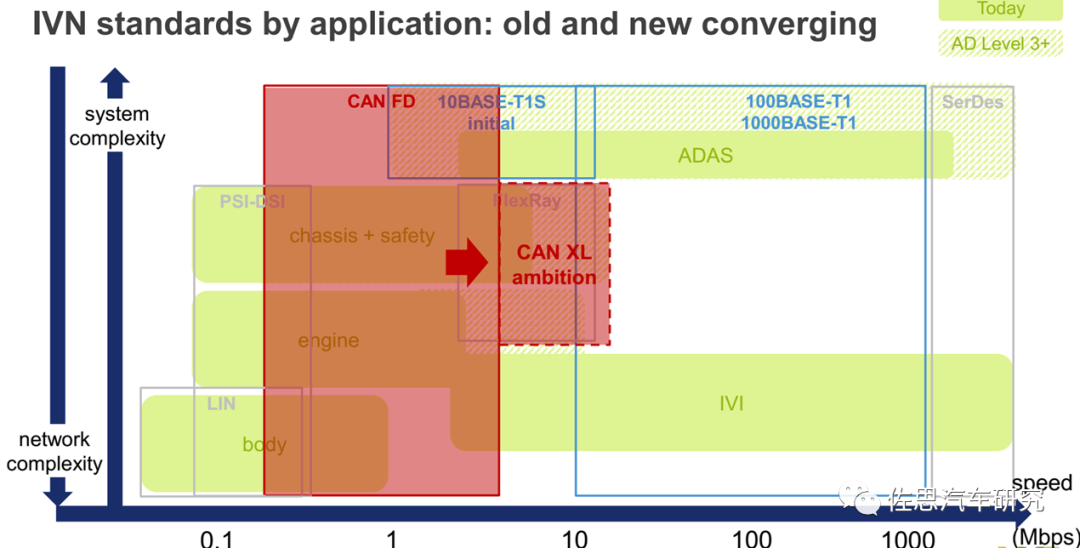
圖片來源:NXP
目前,車身領域主要是LIN總線,氣囊安全領域是PSI總線,底盤、引擎、電控、電池領域主要是CAN總線,歐洲三大豪華車和沃爾沃底盤領域是FlexRay總線。CAN XL第一個取代的就是FlexRay總線,前向毫米波雷達領域主要是CAN-FD總線,域控制器領域主要是以太網,攝像頭與顯示領域主要是解串行與加串行SerDes。
驅動車內總線發展的根源是三大任務:一是自動駕駛,二是軟件定義汽車的服務導向架構,三是電動化。服務導向架構(SOA)主要作用包括大幅降低軟件開發成本,縮短軟件開發周期,從按月計算變為按小時計算;其次是提高OTA效率,縮短OTA時間;最后是V2X或云計算。
目前比較先進的車輛已經處于交叉域控制器時代,如蔚來的ES8,智己的LS7,寶馬的iX。特斯拉的左中右三個區域控制器表明它還是Body Zonal時代。未來將進化到SDV軟件定義汽車時代。
CAN FD的主要缺點是振鈴現象,信號振鈴現象在CAN通訊中是普遍存在的,尤其在星型拓撲結構中當總線電平由顯性狀態切換到隱性狀態時更容易產生。更高的通訊速率意味著更窄的位寬時間,當前CAN FD的2Mbps相較以前HS-CAN的500kbps位寬時間由2000ns縮短為500ns。同樣強度的振鈴干擾,在更高的通訊速率下,由于得不到足夠的時間衰減到隱性差分電壓判定閾值以下,從而更容易導致通訊錯誤。
為減少振鈴效應,目前主流的做法是縮小CAN網絡規模,減少節點數,縮短支線長度,盡量使用線性拓撲結構(linear topology)等。這些措施確實能有效減小振鈴強度,但也帶來了一些缺點:
增加了CAN總線數量,例如將一條10個節點的總線拆分成兩條5個節點的總線;
增加了網關(gateway)的需求,以應對更多不同總線之間的信息交互;
縮短支線長度,變更拓撲結構等措施,與整車模塊布局相沖突。
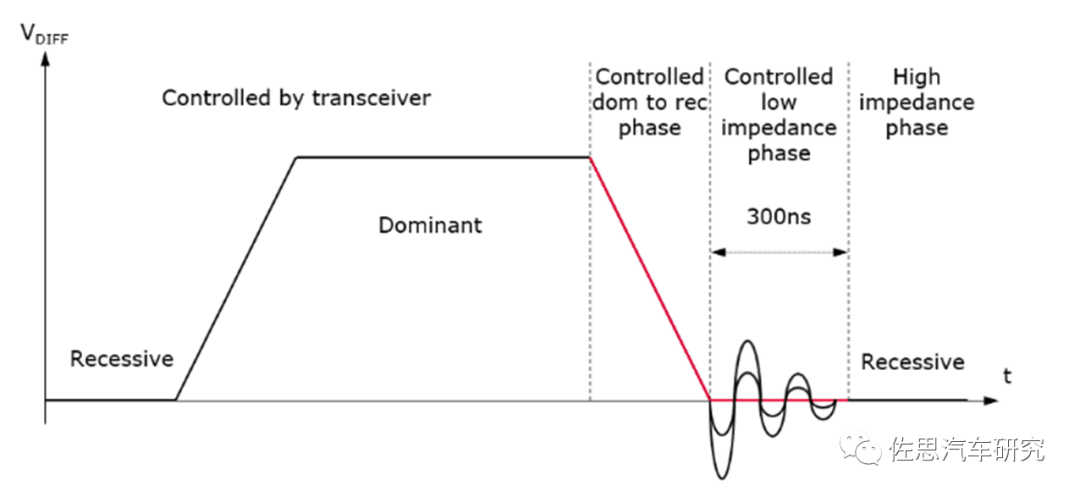
圖片來源:英飛凌
SIC信號增強技術是當總線需要從顯性狀態切換到隱性狀態時,收發器首先會控制總線電平的切換斜率,這一功能在改善EMC表現的同時也適當降低了振鈴強度。在此之后的300ns內收發器將總線控制在低阻抗狀態,從而徹底吸收振鈴能量。
使用SIC后,通訊速率可以提高至8Mbps,目前支持 CAN FDSIC的主要有英飛凌的TLE9371,NXP的TJA1463/1463,德州儀器的TCAN1463。
CAN FD Light僅對從命令節點接收到的CAN FD數據幀起作用,這避免了昂貴的附加電路,響應節點不進行仲裁。通信方案是命令/響應行為,一個命令節點控制連接的響應節點的通信,傳輸的幀符合ISO 11898-1:2015中規定的CAN FD數據幀,這意味著最大有效載荷(數據段)可以達到64字節。支持ISO 11898-1:2015中指定的復雜錯誤檢測功能,但不傳輸錯誤和遠程幀。因此,數據幀的調度應該是周期性的。這也意味著無法保證網絡范圍內的數據一致性。如果需要,這應該在應用程序中解決。
CAN FD Light適用于低成本應用,例如道路車輛的智能前照燈(smartheadlight)。連接的LED集群可以從一個命令節點單獨控制。其他潛在應用包括:供暖(heating),通風(ventilation),air-conditioning空調(HVAC)等系統。CAN FDLight規范不支持比特率切換。因此,最大比特率為1 Mbit/s,但仍比傳統串行通信鏈路(例如EIA 232)和網絡(例如LIN)更快。
CAN XL幀結構總體與CAN FD一致,幀的頭尾是低速模式(約1MBit/s),幀主體是高速模式,高速模式和低速模式通過特定字段劃分。幀格式的簡要說明如下:
Priority ID、AF(Acceptance Field):與CAN ID相比,CAN XL把優先級和message ID的概念做了拆分,Priority ID用于處理優先級,AF用于表示message ID,后文做額外說明;
XL:這個字段包含多個bit,表示此報文是標準CAN報文、CAN FD報文還是CAN XL報文(即兼容CAN、CAN FD);
ADS(Arbitration Data Sequence)、DAS(Data Arbitration Sequence):速率轉換的過渡字段,用于低速率轉高速率、高速率轉低速率;
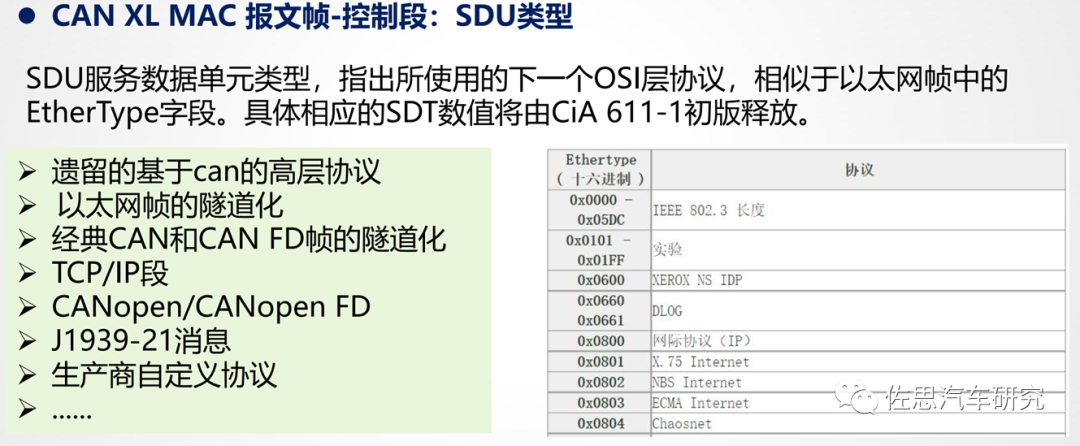
SDT(SDU Type):指示數據類型,后文做額外說明;
SEC:表示是否為加密數據,由于目前的資料有限,可能需要等CAN XL正式發布后再討論其作用與否;
SBC(Stuff Bit Count)、PCRC、FCRC、FCP(Format Check Pattern):用于CRC校驗、錯誤檢測,由于可攜帶數據長度增加了很多,因此設計了前后2處的CRC檢驗,CRC的長度也相應擴展;
VCID(Virtual CAN Network ID):類似以太網中的VLAN。
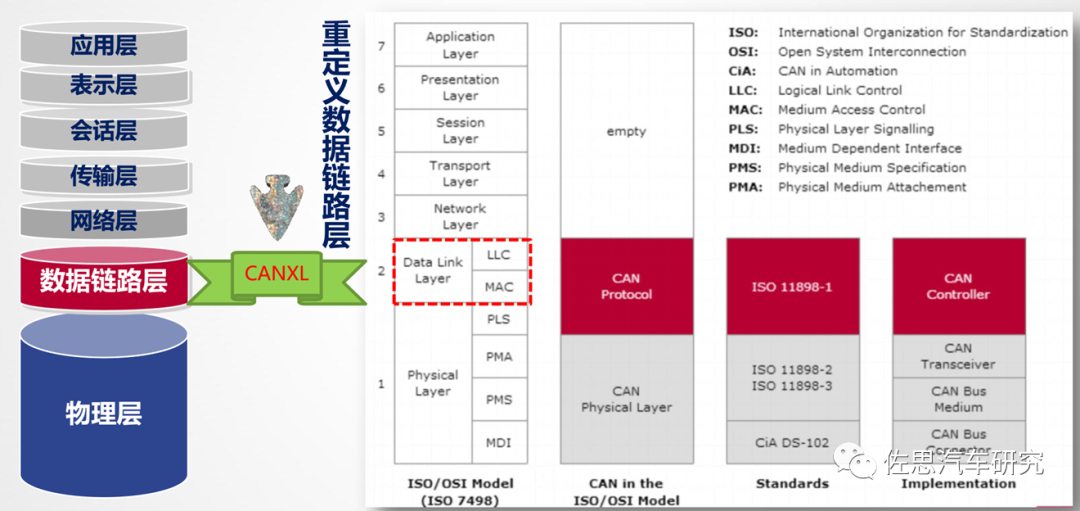
2020年的第17屆國際CAN大會(iCC)上,CiA推出了第三代CAN通信技術CAN-XL(extra long)。CAN XL重新定義兩個數據鏈路層即LLC和MAC。
全新LLC幀格式
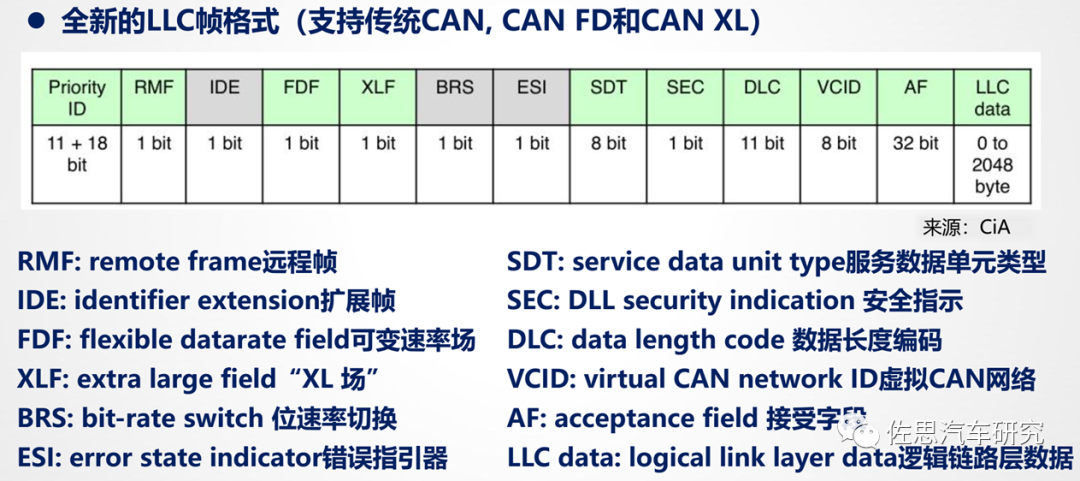
圖片來源:虹科電子
圖片來源:虹科電子
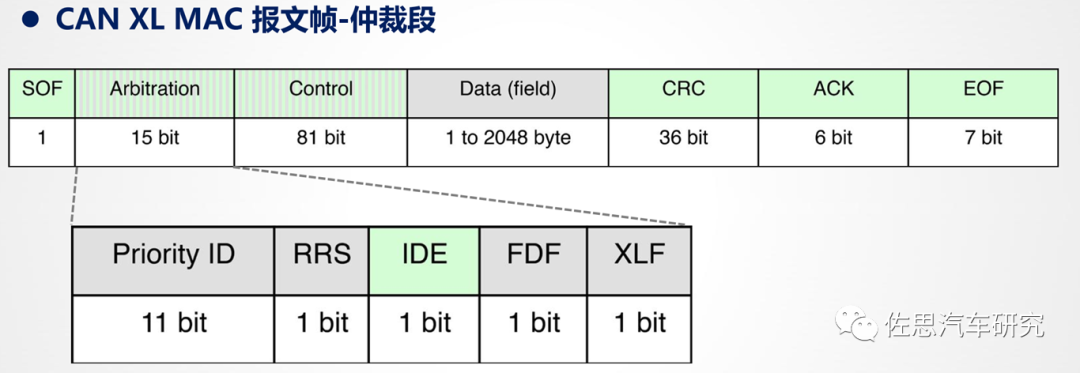
在經典的CAN和CAN FD中,CAN ID段用于仲裁和尋址目的,不過在CAN XL協議中仲裁和尋址功能是分開的。
圖片來源:虹科電子
CAN XL一方面是從CAN FD衍生,繼承了CAN FD的特性(如仲裁機制、錯誤檢測等等),能很好地銜接以CAN為主的車內通信(主要是指基于信號的通信方式);另一方面,CAN XL對其協議做了很大的擴展,允許在CAN XL上運行TCP/IP,CAN XL期望做到對以太網上層協議的良好兼容(特別是面向服務的通信方式)。
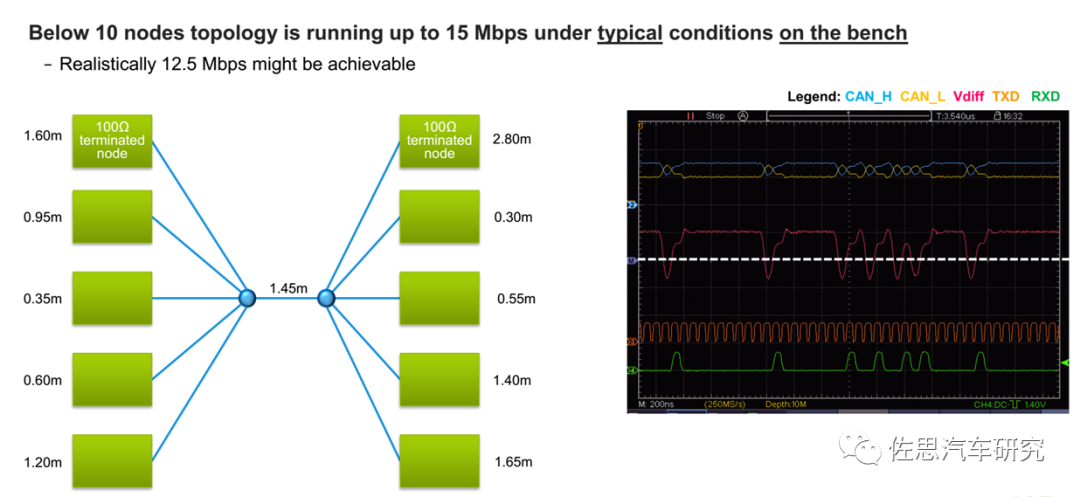
低于10個節點拓撲的速率可達15Mbps。
CANXL典型應用
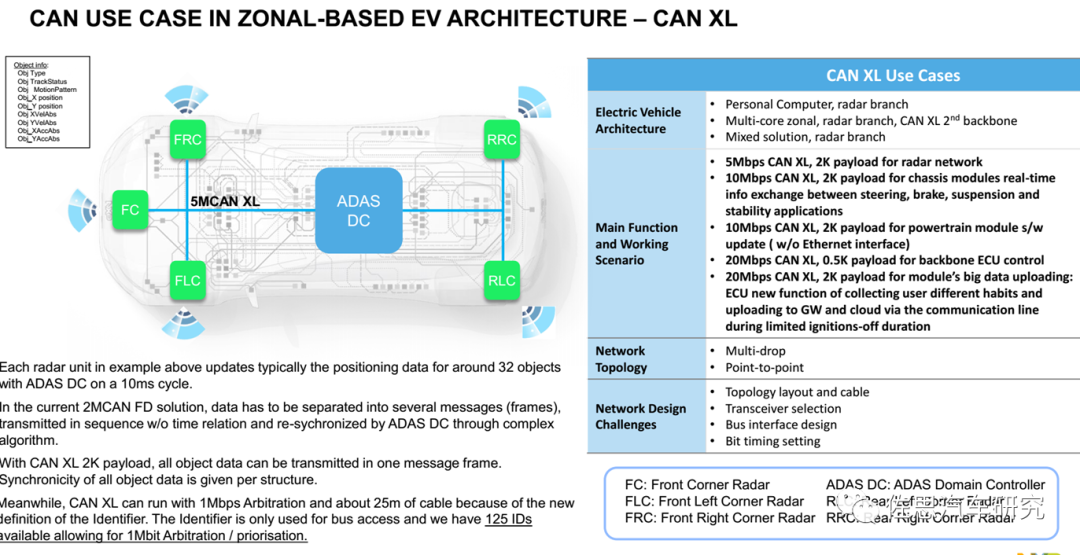
圖片來源:NXP
高性能毫米波雷達是CAN XL最佳應用場合,隨著4D毫米波雷達的大量出現以及角雷達都轉換為77GHz中距離雷達,毫米波雷達可以提供更多信息,早期的毫米波雷達只能提供目標速度、距離和方位角信息,且一般最多監測8-16個目標,Mobileye設計的毫米波雷達通道數高達2000以上(特斯拉的4D毫米波雷達僅為48通道),華為的4D毫米波雷達是288通道。如此高的通道基本上就是近似16線激光雷達,可以提供目標類型、軌跡狀態、Motion Pattern、坐標方位、Velabs、Accabs,最高可監測128-256個目標。
除了毫米波雷達,其他包括汽車標定與診斷、E-CALL緊急呼叫也是CAN XL的目標應用領域。
功耗方面,CAN XL對比以太網優勢明顯,當前的車載以太網對于休眠喚醒的深度支持大多需要I/O或者CAN端口作為控制來實現,這對于車內網絡來說顯然不夠靈活并且也產生額外的成本,或是需要10BBASE-T1S的PHY同樣支持TC10所定義的Sleep/Wake-up機制。而CAN XL由于繼承了CAN本身的休眠喚醒特性且可兼容CAN,有著天然的優勢(CAN XL可以使用標準CAN報文作為喚醒信號,而無需為了適應高速率做額外定義)。
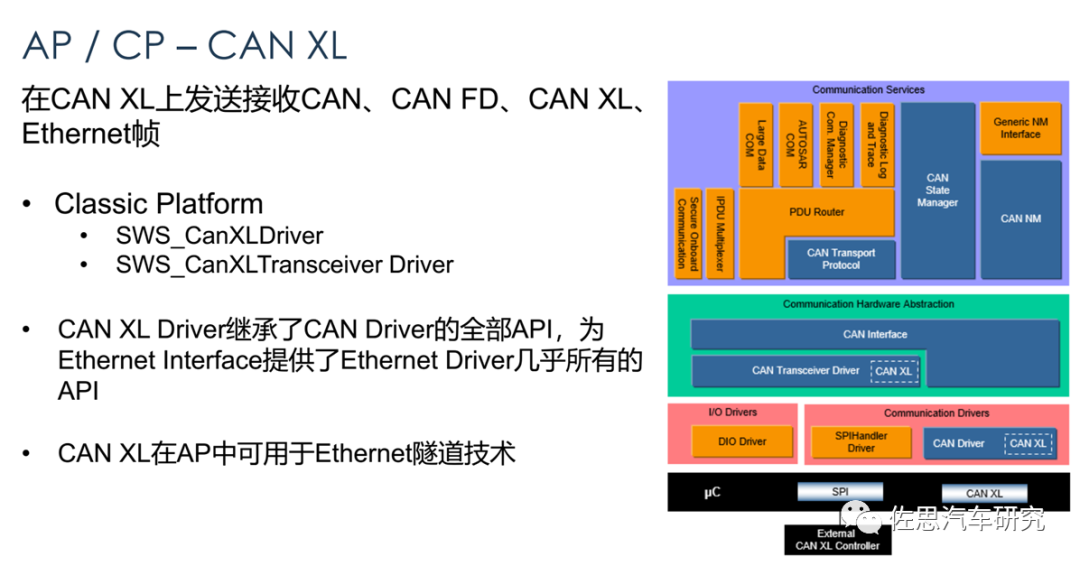
在最新一版AUTOSAR即R22-11上,也對CAN XL做了特別對應,無論AP還是CPU都支持CAN XL。
CAN XL目前最大的缺點是物理層還未定型,標準不夠完善,而其競爭對手車載以太網10Base-T1S已經完成了所有標準,在2019年底發布了IEEE 802.3cg標準,并且ADI、Microchip已經有相關產品量產。
審核編輯:湯梓紅
-
mcu
+關注
關注
146文章
17580瀏覽量
356434 -
CAN總線
+關注
關注
145文章
1966瀏覽量
131797 -
接口
+關注
關注
33文章
8832瀏覽量
152709 -
通訊協議
+關注
關注
10文章
282瀏覽量
20594
原文標題:挑戰車載以太網的CAN XL總線
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
高速CAN總線和低速CAN總線的特性


CAN/CAN FD/CAN XL三大總線協議解讀,是逐步替代關系嗎?






CAN總線概述及應用_CAN總線的應用案例(汽車CAN總線應用)






 工商網監
工商網監

評論