") 科學(xué)家研發(fā)仿生小鼠機(jī)器人,可用于災(zāi)后救援和探測檢修等領(lǐng)域
科學(xué)家研發(fā)仿生小鼠機(jī)器人,可用于災(zāi)后救援和探測檢修等領(lǐng)域
現(xiàn)今的四足機(jī)器人在運(yùn)動(dòng)能力方面已經(jīng)取得顯著進(jìn)步,但與自然界的動(dòng)物相比,還存在一定的差距。
動(dòng)物們能夠高效地利用其軀干來增強(qiáng)運(yùn)動(dòng)能力,比如貓科動(dòng)物能通過扭轉(zhuǎn)身體順利通過曲折地形,以及通過軀干儲存和釋放能量,實(shí)現(xiàn)快速移動(dòng)和靈活轉(zhuǎn)變方向。
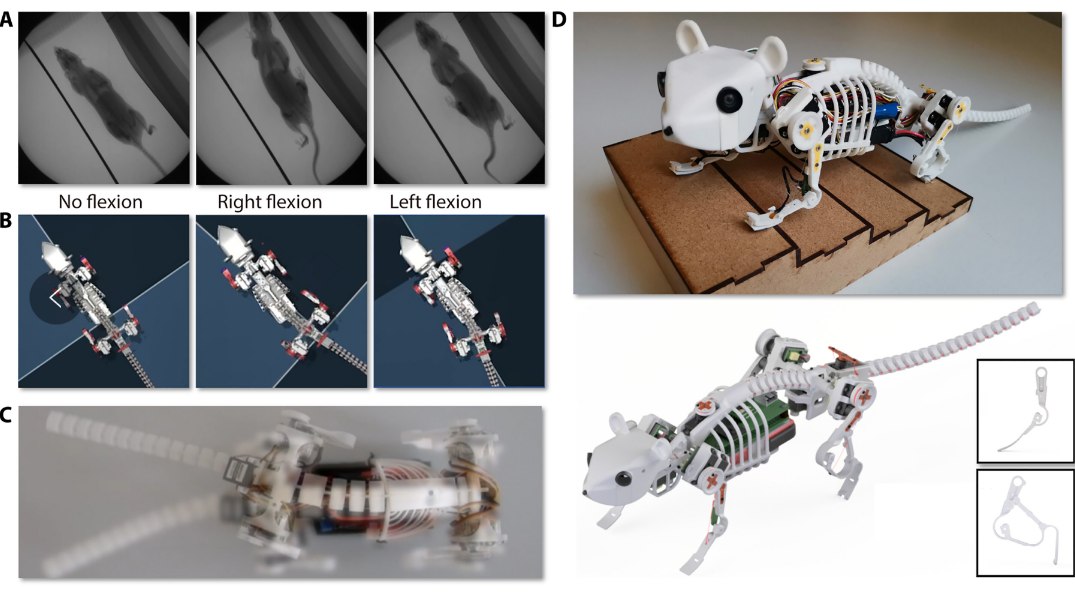
近日,在一項(xiàng)研究德國慕尼黑工業(yè)大學(xué)邴振山博士和所在團(tuán)隊(duì)首次揭示了柔性脊柱在提升足式機(jī)器人運(yùn)動(dòng)能力方面的重要性。
他們設(shè)計(jì)并開發(fā)了一款帶有柔性脊柱的老鼠型機(jī)器人,并開發(fā)了一系列基于脊柱的機(jī)器人運(yùn)動(dòng)步態(tài)和控制算法。通過實(shí)驗(yàn),他們驗(yàn)證了脊柱在提升機(jī)器人運(yùn)動(dòng)能力,包括穩(wěn)定性、速度和轉(zhuǎn)彎能力方面的重要作用。
本次研究得到了三位審稿人的高度評價(jià)與認(rèn)可。其中一位審稿人對他們的工作表示極大的贊賞,認(rèn)為這項(xiàng)成果在仿生四足機(jī)器人研究領(lǐng)域具有巨大潛力,論文也突顯了本次工作在未來足式機(jī)器人發(fā)展方向上的重要影響,以及柔性脊柱在提升機(jī)器人性能方面的關(guān)鍵作用。
第二位審稿人提供了具體的修改建議,例如增加與優(yōu)化后的基于模型的控制器和剛性脊柱版本的機(jī)器人進(jìn)行比較的內(nèi)容。
第三位審稿人則對他們設(shè)計(jì)的柔性脊柱結(jié)構(gòu)和驅(qū)動(dòng)方式表示贊賞,特別是通過 3D打印技術(shù)制造的復(fù)雜軀干結(jié)構(gòu),以及通過精巧設(shè)計(jì)實(shí)現(xiàn)的機(jī)器人脊柱的柔性和強(qiáng)度。
此外,審稿人還肯定了他們采用繩驅(qū)動(dòng)方式對機(jī)器人結(jié)構(gòu)進(jìn)行的合理優(yōu)化。
老鼠機(jī)器人的潛在應(yīng)用領(lǐng)域主要集中在復(fù)雜狹小地形的災(zāi)后救援、探測檢修等任務(wù)上。這與生物學(xué)家利用訓(xùn)練過的非洲大鼠進(jìn)行類似任務(wù)的現(xiàn)實(shí)情況相呼應(yīng)。
例如,有的生物學(xué)家已經(jīng)通過在大鼠身上安裝攝像頭模組,并通過訓(xùn)練來控制其運(yùn)動(dòng),從而使它們能夠執(zhí)行探測和偵察等特殊任務(wù)。
老鼠機(jī)器人與生物大鼠的主要區(qū)別在于它們無需經(jīng)過訓(xùn)練即可執(zhí)行任務(wù)。這些機(jī)器人可以自主操作或在操作人員的操控下完成相關(guān)任務(wù)。
這意味著在執(zhí)行災(zāi)后救援、排雷等任務(wù)時(shí),老鼠機(jī)器人能夠提供更高的靈活性和可控性,同時(shí)減少對實(shí)際動(dòng)物的依賴和潛在風(fēng)險(xiǎn)。
“在這項(xiàng)研究過程中,最引人入勝的部分無疑是實(shí)驗(yàn)結(jié)果證實(shí)了理論假設(shè)和控制模型。當(dāng)然,這個(gè)過程同樣伴隨著諸多困難和挑戰(zhàn)。”研究人員表示。
由于機(jī)器人的高度定制化,測試過程中經(jīng)常出現(xiàn)各種硬件故障。課題組不得不頻繁加班,不斷在“測試-故障-維修”的循環(huán)中努力。
然而,通過不懈的嘗試和反復(fù)實(shí)驗(yàn),他們最終通過詳細(xì)的實(shí)驗(yàn)和數(shù)據(jù)驗(yàn)證了柔性脊柱在提升足式機(jī)器人運(yùn)動(dòng)能力方面的重要作用。
(來源:Science Robotics)
未來,他們將繼續(xù)深入研究柔性脊柱在足式機(jī)器人運(yùn)動(dòng)中的作用。在目前的工作中,他們主要關(guān)注了脊柱橫向擺動(dòng)的效果。
接下來,他們打算探索柔性脊柱在縱向平面內(nèi)擺動(dòng)對機(jī)器人運(yùn)動(dòng)能力的影響。
同時(shí),這個(gè)新的研究方向?qū)⒂兄谒麄兏娴乩斫馊嵝约怪倪\(yùn)動(dòng)學(xué)和動(dòng)力學(xué)特性,以及它如何影響機(jī)器人的整體運(yùn)動(dòng)效率和靈活性。
通過對脊柱縱向擺動(dòng)的研究,該團(tuán)隊(duì)期望能夠進(jìn)一步提升機(jī)器人在復(fù)雜地形中的適應(yīng)性和敏捷性,這對于提升其在災(zāi)后救援、偵察探測等應(yīng)用場景中的實(shí)用性將是至關(guān)重要的。
對于未來發(fā)展邴振山表示:“下一步我計(jì)劃回國工作,在國內(nèi)高校中尋求教職位置。希望能夠在國內(nèi)繼續(xù)老鼠機(jī)器人的研究,推動(dòng)國家機(jī)器人技術(shù)進(jìn)步,并培養(yǎng)機(jī)器人相關(guān)人才。”
-
控制器
+關(guān)注
關(guān)注
112文章
16332瀏覽量
177812 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28380瀏覽量
206918 -
3D打印
+關(guān)注
關(guān)注
26文章
3547瀏覽量
109028
原文標(biāo)題:科學(xué)家研發(fā)仿生小鼠機(jī)器人,可用于災(zāi)后救援和探測檢修等領(lǐng)域
文章出處:【微信號:tjrobot,微信公眾號:天津機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
【書籍評測活動(dòng)NO.51】具身智能機(jī)器人系統(tǒng) | 了解AI的下一個(gè)浪潮!
知行機(jī)器人獲誠美資本與中關(guān)村智友聯(lián)合領(lǐng)投
AI for Science:人工智能驅(qū)動(dòng)科學(xué)創(chuàng)新》第4章-AI與生命科學(xué)讀后感
英偉達(dá)預(yù)測機(jī)器人領(lǐng)域或迎“GPT-3時(shí)刻”
Jim Fan展望:機(jī)器人領(lǐng)域即將迎來GPT-3式突破
天津大學(xué)科學(xué)家突破人類大腦器官成功驅(qū)動(dòng)機(jī)器人
Al大模型機(jī)器人
新華社:突破性成果!祝賀我國科學(xué)家成功研發(fā)這一傳感器!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論