 詳解SystemVue中AtoD模型的help文件
詳解SystemVue中AtoD模型的help文件
(1) 看懂軟件中ADC模型的help文件,需要懂的知識點也是不少的哈!
比如說,SystemVue中的AtoD模型,上面的設置參數要搞明白,那也不容易的。
打開AtoD模型的參數設置,首先映入眼簾的是這個。
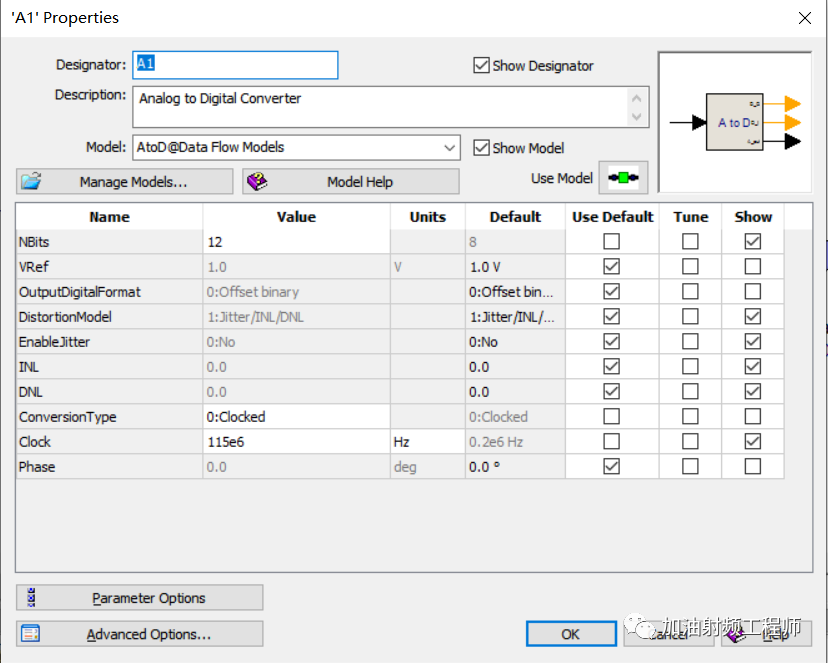
這里有10項設置。如果做了選擇以后,項目數又會增多。
(2)參照help文件,先來說一說前3項哈!
NBits,就是我們平時說的8位,12位ADC中的8位和12位。即設置ADC的分辨率,這個設定完后,ADC就有2^NBits個量化電平。
比如說,Nbits=3,那么ADC就有8個量化電平。
VRef,是設定ADC的參考電壓。輸入信號的幅度,需要位于[-Vref,Vref]之間,否則就會發生clipping。
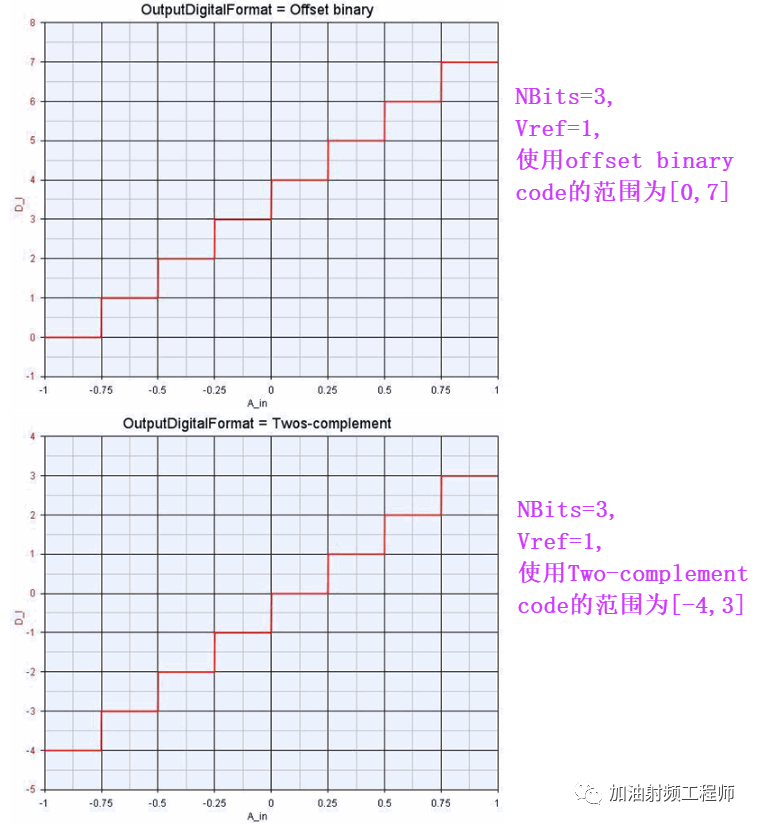
OutputDigitalFormat,設定ADC輸出的編碼模式。如果OutputDigitalFormat=Offset binary,那么ADC的數字輸出在[0,2^NBits-1]之間;如果OutputDigitalFormat=Twos-complement,那么ADC的輸出就在[-2^(NBits-1),2^(NBits-1)-1]。
help文件中,畫了兩幅圖,很好的把上面的三個參數聯系起來了。
(3)還有INL, DNL參數。
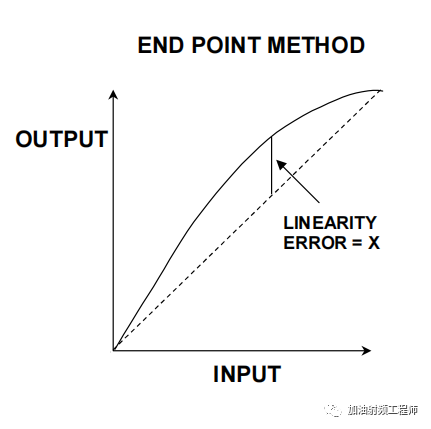
INL全稱是integral nonlinearities,積分非線性。
INL是指在補償完offset error和gain error后的ADC的傳輸函數與理想ADC傳輸函數的偏移,單位為LSB。
文獻【1】中提到,ADI一般采用End Point Method來測量INL,即取測得曲線的首尾的點連成直線,并且調整完offset error和gain error以后,如下圖所示。
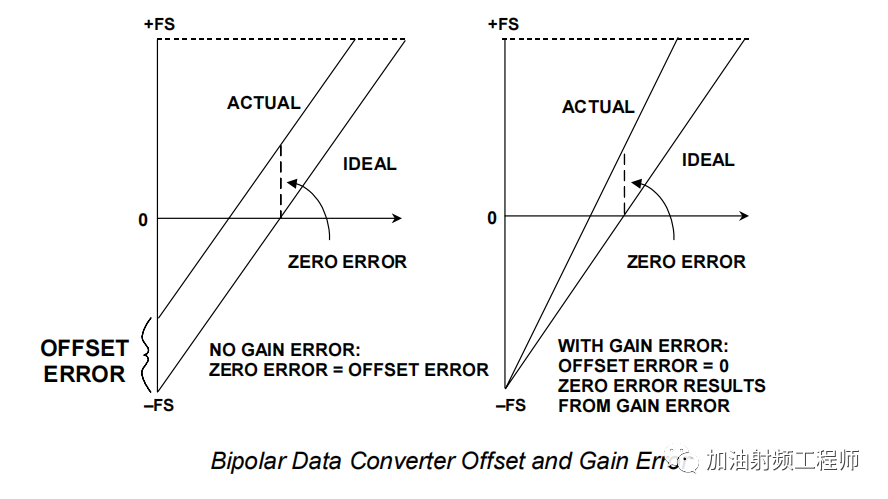
那什么是gain error和offset error呢,看下面的圖就明白了。
DNL,是differential nonlinearities,差分非線性,定義的是任意碼偏離理想的1LSB步進的程度。
在理想情況下,模擬信號中一個LSB的變化,嚴格地對應數字碼中一個LSB的變化。但是實際情況下,不是。
比如說,2bit的ADC,共有4個碼。理想情況下步進為1LSB,如下圖實線所示,但是實際上,可能小了0.5LSB或者1LSB。
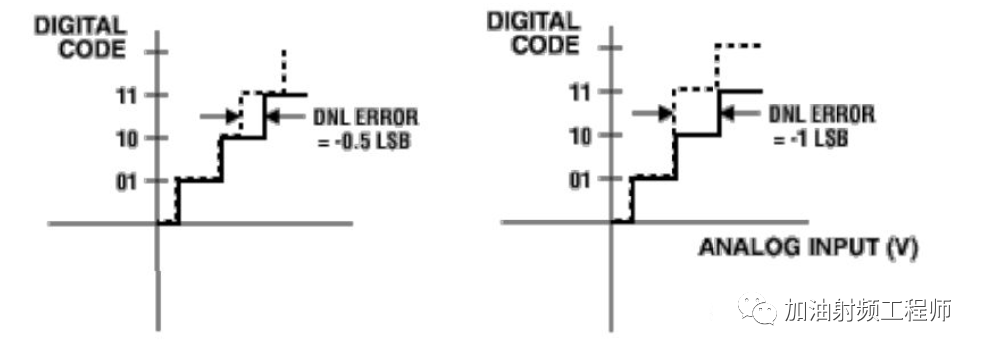
DNL誤差小于1LSB,才能保證ADC具有no missing codes。所謂no missing code,是指當輸入模擬電壓在[-Vref,Vref]中變化時,ADC的輸出數據會包含所有的碼。
(4)在EnableJitter選項中,有三種,分別位No, Time Domain, Frequency Domain。
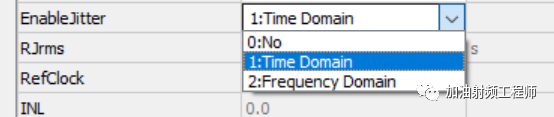
這個抖動可以用時域的抖動或者頻域的相噪來表示。這樣子,還是很貼心的。這樣就不需要去找小軟件來進行兩者的轉換了。
審核編輯:湯梓紅
-
adc
+關注
關注
98文章
6495瀏覽量
544466 -
參數
+關注
關注
11文章
1829瀏覽量
32195 -
模型
+關注
關注
1文章
3226瀏覽量
48807 -
SystemVue
+關注
關注
2文章
12瀏覽量
13693
發布評論請先 登錄
相關推薦
關于SystemVue中MathLang器件的使用
3D模型文件格式之OBJ詳解
怎么在SystemVue 2013中創建零件向導
用SystemVue軟件完成無線通信系統的設計、測試與
安捷倫推出衛星通信SystemVue參考設計平臺
labview開發軟件中help文件的調用子VI

SystemVue的簡單介紹





 工商網監
工商網監
評論