 闡述基于激光三角測距法的激光雷達原理
闡述基于激光三角測距法的激光雷達原理
激光三角測距法作為低成本的激光雷達設計方案,可獲得高精度、高性價比的應用效果,并成為室內服務機器人導航的首選方案,本文將對激光雷達核心組件進行介紹并重點闡述基于激光三角測距法的激光雷達原理。
激光雷達四大核心組件
激光雷達主要由激光器、接收器、信號處理單元和旋轉機構這四大核心組件構成。
激光器:激光器是激光雷達中的激光發射機構。在工作過程中,它會以脈沖的方式點亮。
接收器:激光器發射的激光照射到障礙物以后,通過障礙物的反射,反射光線會經由鏡頭組匯聚到接收器上。
信號處理單元:信號處理單元負責控制激光器的發射,以及接收器收到的信號的處理。根據這些信息計算出目標物體的距離信息。
旋轉機構:以上3個組件構成了測量的核心部件。旋轉機構負責將上述核心部件以穩定的轉速旋轉起來,從而實現對所在平面的掃描,并產生實時的平面圖信息。
激光三角測距法原理
目前激光雷達的測量原理主要有脈沖法、相干法和三角法3種,脈沖法和相干光法對激光雷達的硬件要求高,但測量精度比激光三角法要高得多,故多用于軍事領域。而激光三角測距法因其成本低,精度滿足大部分商用及民用要求,故得到了廣泛關注。
激光三角測距法主要是通過一束激光以一定的入射角度照射被測目標,激光在目標表面發生反射和散射,在另一角度利用透鏡對反射激光匯聚成像,光斑成像在CCD(Charge-coupled Device,感光耦合組件)位置傳感器上。當被測物體沿激光方向發生移動時,位置傳感器上的光斑將產生移動,其位移大小對應被測物體的移動距離,因此可通過算法設計,由光斑位移距離計算出被測物體與基線的距離值。由于入射光和反射光構成一個三角形,對光斑位移的計算運用了幾何三角定理,故該測量法被稱為激光三角測距法。
按入射光束與被測物體表面法線的角度關系,激光三角測距法可分為斜射式和直射式兩種。
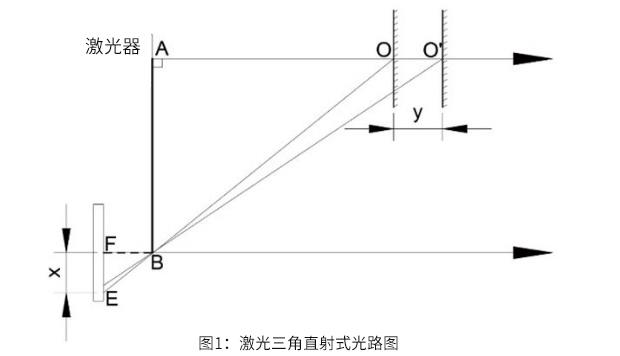
1、直射式激光三角測距法
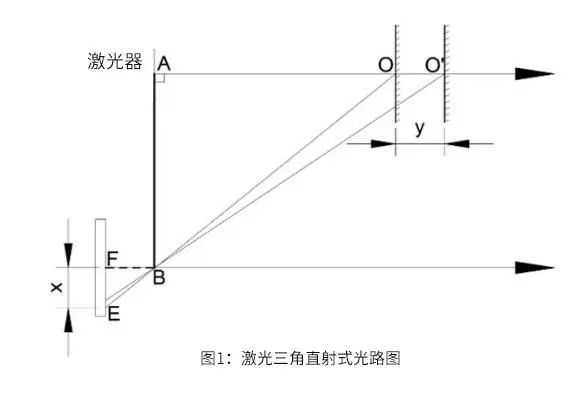
如圖1所示,當激光光束垂直入射被測物體表面,即入射光線與被測物體表面法線共線時,為直射式激光三角法。
2、斜射式激光三角測距法
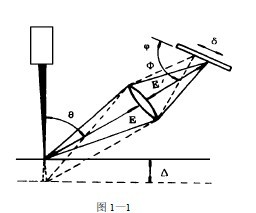
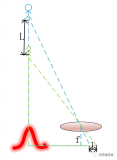
當光路系統中,激光入射光束與被測物體表面法線夾角小于90°時,該入射方式即為斜射式。如圖2所示的光路圖為激光三角法斜射式光路圖。
由激光器發射的激光與物體表面法線成一定角度入射到被測物體表面,反(散)射光經B處的透鏡匯聚成像,最后被光敏單元采集。
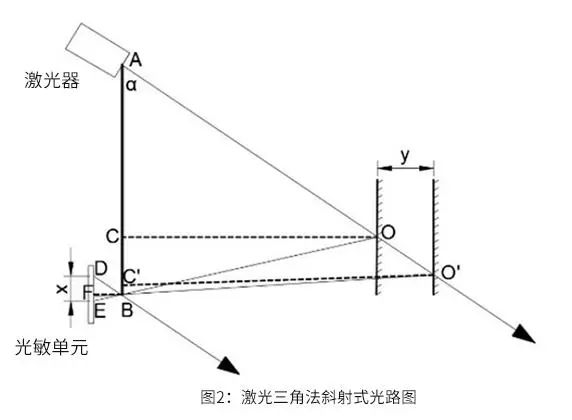
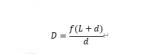
由圖2可知入射光AO與基線AB的夾角為α,AB為激光器中心與CCD中心的距離,BF為透鏡的焦距f,D為被測物體距離基線無窮遠處時反射光線在光敏單元上成像的極限位置。DE為光斑在光敏單元上偏離極限位置的位移,記為x。當系統的光路確定后,α、AB與f均為已知參數。由光路圖中的幾何關系可知△ABO∽△DEB,則有邊長關系:
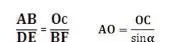
則易知
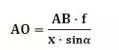
在確定系統的光路時,可將CCD位置傳感器的一個軸與基線AB平行(假設為y軸),則由通過算法得到的激光光點像素坐標為(Px,Py)可得到x的值為:

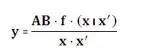
其中CellSize是光敏單元上單個像素的尺寸,DeviationValue是通過像素點計算的投影距離和實際投影距離x的偏差量。當被測物體與基線AB產生相對位移時,x改變為x,由以上條件可得被測物體運動距離y為:
總結
無論是直射式還是斜射式激光三角測距法,均可實現對被測物體的高精度、非接觸測量,但直射式分辨率沒有斜射式高。
審核編輯:劉清
-
機器人
+關注
關注
211文章
28379瀏覽量
206914 -
接收器
+關注
關注
14文章
2468瀏覽量
71871 -
激光器
+關注
關注
17文章
2514瀏覽量
60331 -
信號處理
+關注
關注
48文章
1026瀏覽量
103258 -
激光雷達
+關注
關注
968文章
3967瀏覽量
189824
原文標題:【光電智造】激光三角測距法原理
文章出處:【微信號:今日光電,微信公眾號:今日光電】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
激光雷達分類以及應用
一文詳解激光雷達核心指標,實用性和可靠性第一
激光雷達的核心重要指標到底是什么?
激光雷達除了可以激光測距外,還可以怎么應用?
自動駕駛激光雷達新型探測器:近紅外MPPC
機器人和激光雷達都不可或缺
TOF激光雷達
激光雷達類型:TOF雷達與三角測距雷達
掃地機器人的兩種測距方式:TOF激光雷達和三角測距






 工商網監
工商網監
評論