

一、PID控制
PID控制又稱比例積分微分控制,是一種閉環(huán)控制。下面以圖1所示的恒壓供水系統(tǒng)為例來說明PID控制原理。
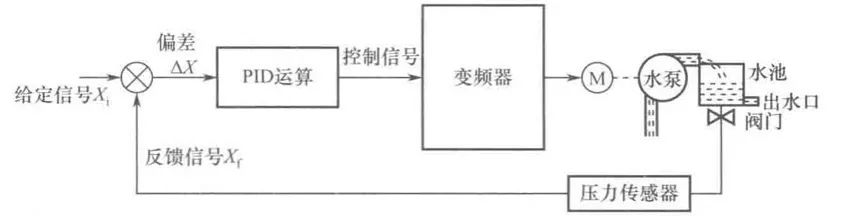
圖6-59 恒壓供水系統(tǒng)的PID控制
電動機(jī)驅(qū)動水泵將水抽入水池,水池中的水除了經(jīng)出水口提供用水外,還經(jīng)閥門送到壓力傳感器,傳感器將水壓大小轉(zhuǎn)換成相應(yīng)的電信號Xf,Xf反饋到比較器與給定信號Xi進(jìn)行比較,得到偏差信號△X(△X=Xi-Xf)。
若△X>0,表明水壓小于給定值,偏差信號經(jīng)PID運算得到控制信號,控制變頻器,使之輸出頻率上升,電動機(jī)轉(zhuǎn)速加快,水泵抽水量增多,水壓增大。
若△X<0,表明水壓大于給定值,偏差信號經(jīng)PID運算得到控制信號,控制變頻器,使之輸出頻率下降,電動機(jī)轉(zhuǎn)速變慢,水泵抽水量減少,水壓下降。
若△X=0,表明水壓等于給定值,偏差信號經(jīng)PID運算得到控制信號,控制變頻器,使之輸出頻率不變,電動機(jī)轉(zhuǎn)速不變,水泵抽水量不變,水壓不變。
由于控制回路的滯后性,會使水壓值總與給定值有偏差。例如,當(dāng)用水量增多水壓下降時,△X>0,控制電動機(jī)轉(zhuǎn)速變快,提高水泵抽水量,從壓力傳感器檢測到水壓下降到控制電動機(jī)轉(zhuǎn)速加快,提高抽水量,恢復(fù)水壓需要一定時間。通過提高電動機(jī)轉(zhuǎn)速恢復(fù)水壓后,系統(tǒng)又要將電動機(jī)轉(zhuǎn)速調(diào)回正常值,這也要一定時間,在這段回調(diào)時間內(nèi)水泵抽水量會偏多,導(dǎo)致水壓又增大,又需進(jìn)行反調(diào)。這樣的結(jié)果是水池水壓會在給定值上下波動(振蕩),即水壓不穩(wěn)定。
采用了PID運算可以有效減少控制環(huán)路滯后和過調(diào)問題(無法徹底消除)。PID運算包括P運算、1運算和D運算。P(比例)運算是將偏差信號△X按比例放大,提高控制的靈敏度:1(積分)運算是對偏差信號進(jìn)行積分運算,消除P運算比例引起的誤差和提
高控制精度,但積分運算使控制具有滯后性:;D(微分)運算是對偏差信號進(jìn)行微分運算,使控制具有超前性和預(yù)測性。
審核編輯:劉清
-
plc
+關(guān)注
關(guān)注
5031文章
13773瀏覽量
472436 -
電動機(jī)
+關(guān)注
關(guān)注
75文章
4156瀏覽量
98313 -
PID控制
+關(guān)注
關(guān)注
10文章
461瀏覽量
41053 -
S7-200
+關(guān)注
關(guān)注
13文章
411瀏覽量
51167
原文標(biāo)題:西門子S7-200 SMART PLC-PID 指令及相關(guān)內(nèi)容說明(上)
文章出處:【微信號:中泰PLC自動化教學(xué),微信公眾號:中泰PLC自動化教學(xué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
S7-200西門子PLC視頻教程大全
西門子S7-200 PLC應(yīng)用100例

西門子S7-200以太網(wǎng)通訊解決方案

西門子PLC S7-200常見的71個故障匯總及解決辦法
西門子PLC S7-200smart程序下載錯誤分析
Simatic S7-200 SMART PLC介紹
西門子PLC S7-200 SMART PID控制功能分享

PLC西門子S7-200smart和S7-1200的區(qū)別?
西門子S7-200 Smart PLC加密設(shè)置全面指南

S7協(xié)議讀取西門子S7-200 Smart PLC數(shù)據(jù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論