


一、霍爾電機原理說明
霍爾電機就是帶霍爾傳感器的直流無刷電機。霍爾傳感器位于霍爾板上。 通過霍爾傳感器判斷電機當前運動狀態,控制器根據霍爾采集的信號控制三相輸出,讓電機持續正常的工作,霍爾傳感器的優點是便宜,而且幾乎可以安裝在任何無刷直流電機上,其中升降桌應用最為常見。

使用霍爾傳感器的另一個原因是,在無法接近電機軸,或者無法將傳感器安裝到電機軸上的情況下,霍爾傳感器安裝在電機轉子周圍,這使得它們非常非侵入性且易于集成。
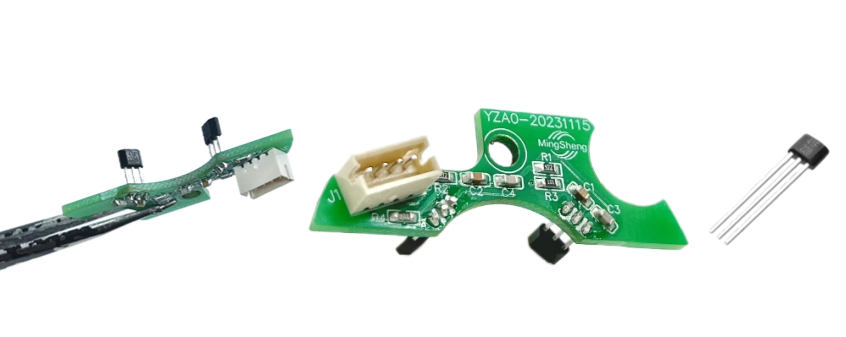
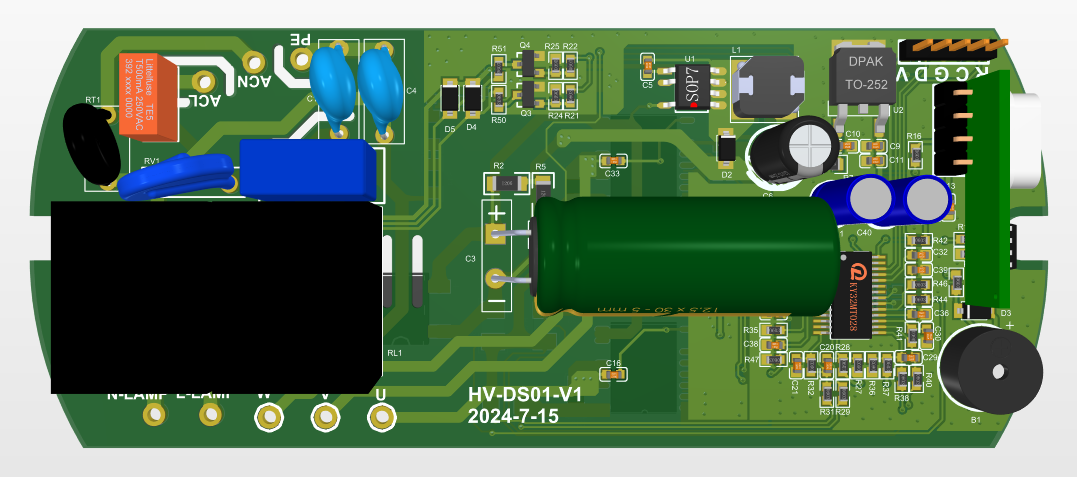
二、霍爾傳感器板
該霍爾板中霍爾是采用FS41霍爾,該霍爾是雙極鎖存霍爾開關,3.0-28V的電壓供電,50MA的輸出電流。
三、基于霍爾傳感器的位置檢測方法
為了掌握好恰當的換相時刻,減少電機的轉矩波動,得到最大的轉矩,轉子位置的檢測非常重要。
位置傳感器在無刷直流電機中起著檢測轉子磁極位置、為BLDC控制提供正確換相信息的作用。位置傳感器將轉子磁極的位置信號轉換成電信號后送入控制器中,控制器控制定子繞組換相,使電樞繞組中的電流隨著轉子位置的變化按一定次序變化,通過氣隙形成步進式旋轉磁場,驅動永磁轉子連續不斷地旋轉。
霍爾傳感器具有體積小,成本較低的特點,通常直接在BLDC電機的定子上安裝三個開關型HALL傳感器檢測轉子位置,間隔60°或者120°安裝方式。
霍爾效應原理:磁場會對位于其中的帶電導體內運動的電荷載流子施加一個垂直于其運動方向的力,該力會使得正負電荷分別積聚到導體的兩側。電荷在導體兩側的積累會平衡磁場的影響,在導體兩側建立穩定的電勢差。產生這一電勢差的過程就叫做霍爾效應。霍爾傳感器使根據霍爾效應制作的一種磁場傳感器,它可以有效的反映通過霍爾元件的此密度。
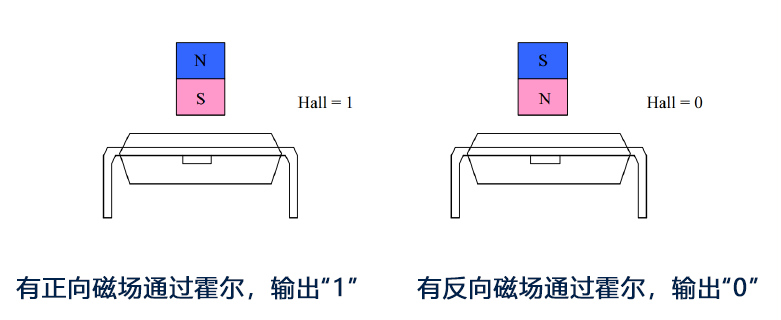
無論何時,只要轉子的磁極掠過霍爾元件,根據轉子當前的極性,霍爾元件會輸出對應邏輯電平0或1,這樣只要根據三個霍爾元件產生的電平,就可以判斷當前轉子的位置,決定電機換相的順序。
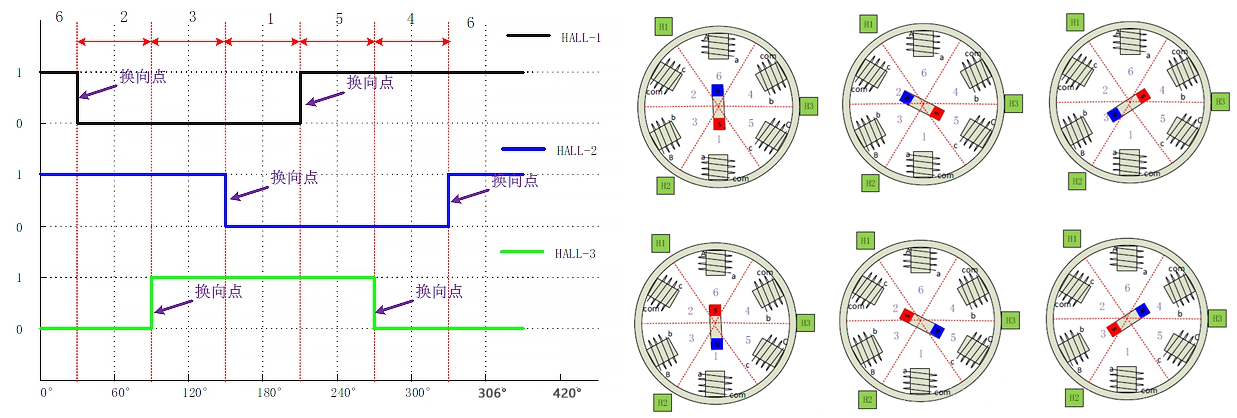
在一個電周期內,三相HALL傳感器所產生的開關狀態是不重復的,每一個開關狀態所占的電角度相等。以120°安裝的HALL傳感器為例,3個HALL傳感器的輸出信號相位互差120°,每轉過60°電角度,其中一個HALL傳感器狀態就會改變。在一個電周期內,3個HALL信號的組合有6種狀態,正好對應于“六步換相”過程。
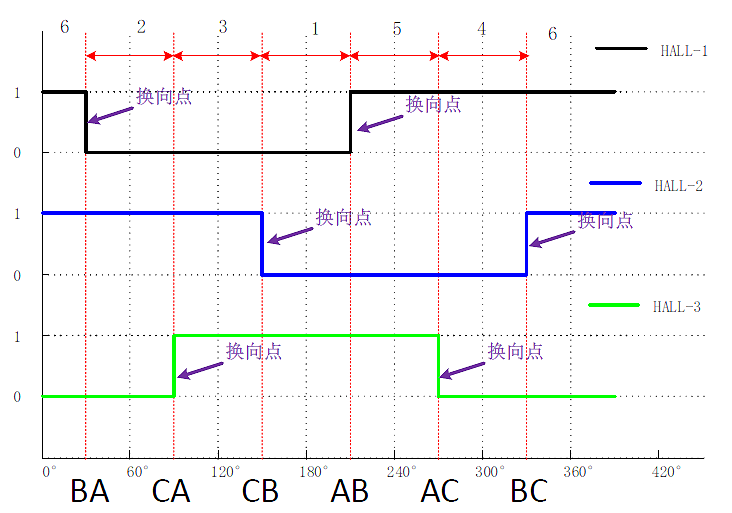
確定好轉子位置后,根據轉子位置進行換相控制,如下圖所示,注意與上圖位置稍作了變化。
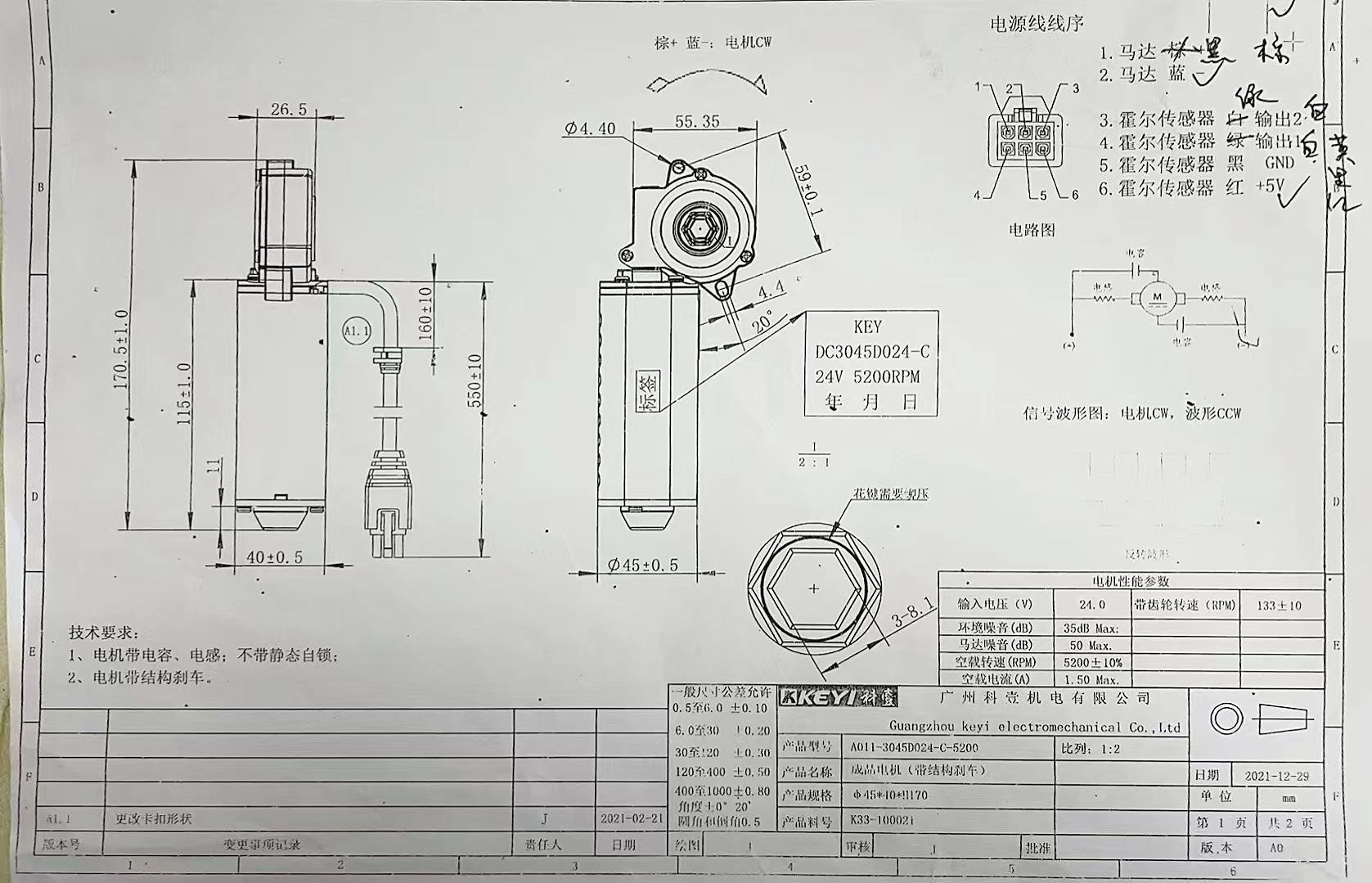
四、成品電機的結構圖
審核編輯 黃宇
-
霍爾傳感器
+關注
關注
28文章
761瀏覽量
64477 -
無刷電機
+關注
關注
60文章
896瀏覽量
47467
發布評論請先 登錄
電機驅動中霍爾轉子位置傳感器介紹
無刷直流電機驅動方案控制板設計以及相關產品應用
東芝推出適用于三相直流無刷電機的新款柵極驅動IC

直流無刷電機的優點是什么?直流無刷電機選型時有哪些注意事項?
直流無刷電機主要應用在哪些方面?直流無刷電機的控制策略有哪些?
直流無刷電機的主要特點是什么?直流無刷電機具體可以組成哪些結構?
物體識別桌 AR物體識互動桌 電容屏實物識別漫游桌
其利天下技術·低速無刷電機如何更好的控制?無刷電機驅動方案開發
什么是無刷電機?它的工作原理是什么??

直流無刷電機 智能高效的動力之選
其利天下技術·無刷電機常見的5種啟動方式及優缺點·無刷電機驅動方案設計開發





 工商網監
工商網監

評論