") 異步電機(jī)主要的三種調(diào)速方法解析
異步電機(jī)主要的三種調(diào)速方法解析
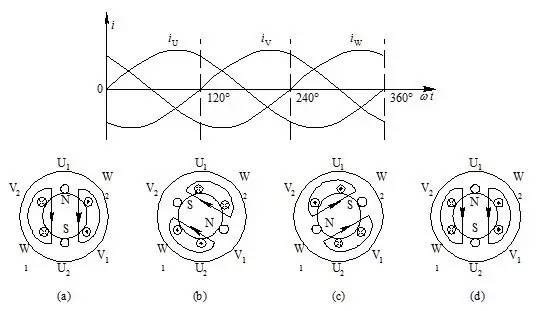
變極調(diào)速
由于一般異步電動(dòng)機(jī)正常運(yùn)行時(shí)的轉(zhuǎn)差率S都很小,電機(jī)的轉(zhuǎn)速n= n1(1-S)決定于同步轉(zhuǎn)速n1。從n1=60f1/P可見,在電源頻率f1不變的情況下,改變定子繞組的極對(duì)數(shù)P,同步轉(zhuǎn)速n1就發(fā)生變化,例如極對(duì)數(shù)增加一倍,同步轉(zhuǎn)速就下降一半,隨之電動(dòng)機(jī)的轉(zhuǎn)速也約下降一半。顯然,這種調(diào)速方法只能做到一級(jí)一級(jí)地改變轉(zhuǎn)速,而不是平滑調(diào)速。

變極電動(dòng)機(jī)一般都用鼠籠式轉(zhuǎn)子,因?yàn)槭蠡\轉(zhuǎn)子的極對(duì)數(shù)能自動(dòng)地隨著定子極對(duì)數(shù)的改變而改變,使定、轉(zhuǎn)子磁場(chǎng)的極對(duì)數(shù)總是相等而產(chǎn)生平均電磁轉(zhuǎn)矩。若為繞線式轉(zhuǎn)子,則定子極對(duì)數(shù)改變時(shí),轉(zhuǎn)子繞組必須相應(yīng)地改變接法以得到與定子相同的極對(duì)數(shù),很不方便。

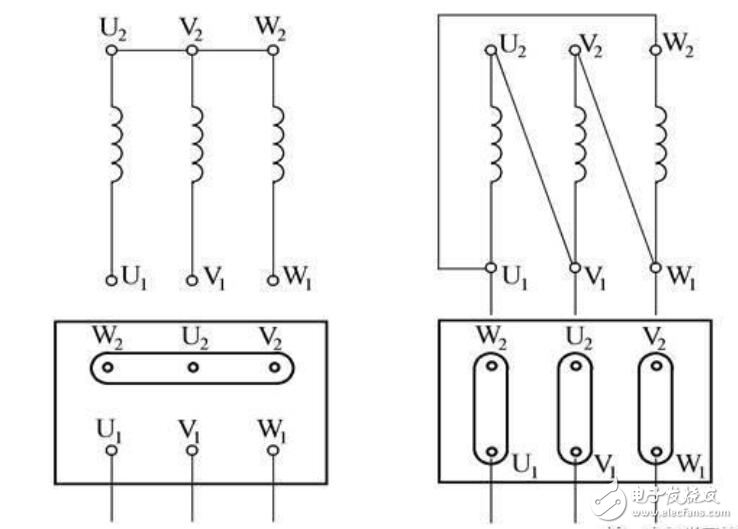
要使定子具有兩種極對(duì)數(shù),容易得到的辦法是用兩套極對(duì)數(shù)不同的定子繞組,每次用其中一套,即所謂雙繞組變極,顯然,這是一個(gè)很不經(jīng)濟(jì)的辦法,只在特殊情況下才采用。理想的辦法是:只裝一套定子繞組而用改變繞組接法來獲得兩種或多種極對(duì)數(shù),即所謂單繞組變極。對(duì)于倍極比情況(如2/4極、4/8極等),單繞組變極早已為人們所采用,隨著科學(xué)技術(shù)的發(fā)展,非倍極比(如4/6極、6/8極等)以及三速(如4/6/8等)采用單繞組變極也得到廣泛應(yīng)用。
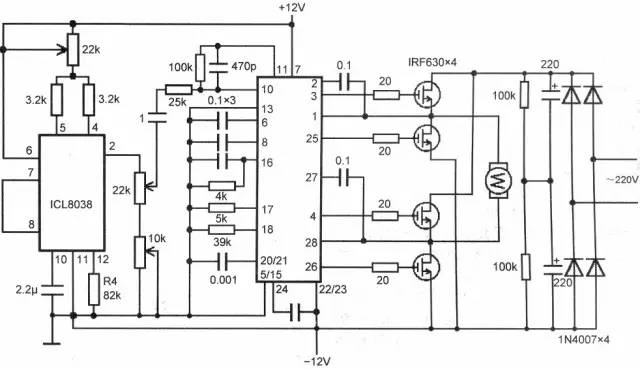
變頻調(diào)速
當(dāng)電源的頻率f1改變時(shí),同步轉(zhuǎn)速n1=60f1/P與頻率成正比變化,于是電動(dòng)機(jī)的轉(zhuǎn)速n也隨之改變,所以改變電源頻率就可以平滑地調(diào)節(jié)異步電動(dòng)機(jī)的轉(zhuǎn)速。

變頻調(diào)速按控制方式不同,可分為U/f控制、轉(zhuǎn)差頻率控制、矢量控制和直接轉(zhuǎn)矩控制等。
(1) U/f控制。U/f控制是為了得到理想的轉(zhuǎn)矩-速度特性,基于在改變電源頻率進(jìn)行調(diào)速的同時(shí),又要保證電動(dòng)機(jī)的磁通不變的思想而提出的。通用型變頻器基本上都采用這種控制方式。U/f控制變頻器結(jié)構(gòu)非常簡(jiǎn)單,缺點(diǎn)是變頻器采用開環(huán)控制方式,不能達(dá)到較高的控制性能,而且在低頻時(shí)必須進(jìn)行轉(zhuǎn)矩補(bǔ)償,才能改善低頻轉(zhuǎn)矩特性。
(2) 轉(zhuǎn)差頻率控制。頻率控制就可以使電動(dòng)機(jī)具有對(duì)應(yīng)的輸出轉(zhuǎn)矩。這種控制方式,在控制系統(tǒng)中需要安裝速度轉(zhuǎn)差頻率控制是一種直接控制轉(zhuǎn)矩的控制方式,它是在U/f控制的基礎(chǔ)上,按照知道異步電動(dòng)機(jī)的實(shí)際轉(zhuǎn)速對(duì)應(yīng)的電源頻率,并根據(jù)希望得到的轉(zhuǎn)矩來調(diào)節(jié)變頻器的輸出感器,有時(shí)還加有電流反饋,以對(duì)頻率和電流進(jìn)行控制,因此是一種閉環(huán)控制方式。該方式可以使變頻器具有良好的穩(wěn)定性,并對(duì)急速的加減速和負(fù)載變動(dòng)有良好的響應(yīng)特性。
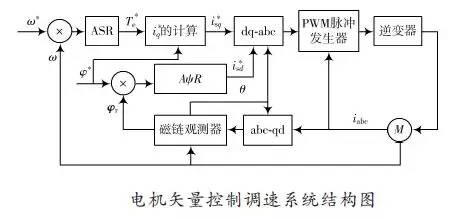
(3)矢量控制。矢量控制是通過矢量坐標(biāo)電路控制電動(dòng)機(jī)定子電流的大小和相位,以達(dá)到對(duì)電動(dòng)機(jī)在d、q、O坐標(biāo)軸系中的勵(lì)磁電流和轉(zhuǎn)矩電流分別進(jìn)行控制,進(jìn)而達(dá)到控制電動(dòng)機(jī)轉(zhuǎn)矩的目的。通過控制各矢量的作用順序、時(shí)間以及零矢量的作用時(shí)間,又可以形成各種PWM波,達(dá)到各種不同的控制目的,例如形成開關(guān)次數(shù)最少的PWM波以減少開關(guān)損耗。目前,在變頻器中實(shí)際應(yīng)用的矢量控制方式主要有基于專差頻率控制的矢量控制方式和無速度傳感器的矢量控制方式兩種。
基于轉(zhuǎn)差頻率的矢量控制方式與轉(zhuǎn)差頻率控制方式兩者的定常特性一致,但是基于轉(zhuǎn)差頻率的矢量控制還要經(jīng)過坐標(biāo)變換對(duì)電動(dòng)機(jī)定子電流的相位進(jìn)行控制。使之滿足一定的條件,以消除轉(zhuǎn)矩電流過渡過程中的波動(dòng)。因此,基于轉(zhuǎn)差頻率的矢量控制方式比轉(zhuǎn)差頻率控制方式在輸出特性方面能得到很大的改善。但是,這種控制方式屬于閉環(huán)方式,需要在電動(dòng)機(jī)上安裝速度傳感器,因此應(yīng)用范圍受到限制。
無速度傳感器矢量控制是通過坐標(biāo)變換處理,分別對(duì)勵(lì)磁電流和轉(zhuǎn)矩電流進(jìn)行控制,然后通過控制電動(dòng)機(jī)定子繞組上的電壓、電流辨識(shí)轉(zhuǎn)速,以達(dá)到控制勵(lì)磁電流和轉(zhuǎn)矩電流的目的。這種控制方式調(diào)速范圍寬,起動(dòng)轉(zhuǎn)矩大,工作可靠,操作方便,但計(jì)算比較復(fù)雜,一般需要專門的處理器來進(jìn)行計(jì)算。因此,該方式實(shí)時(shí)性不是太理想,控制精度受到計(jì)算精度的影響。
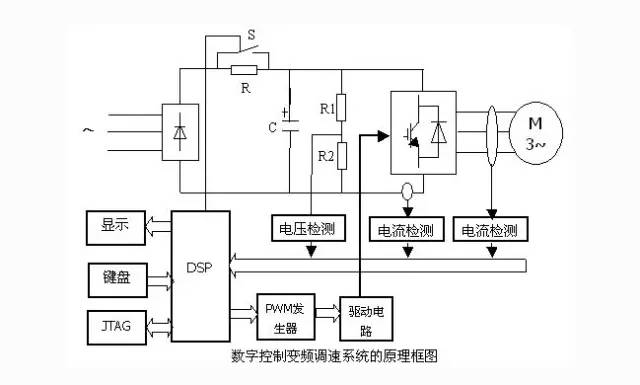
(4)直接轉(zhuǎn)矩控制。直接轉(zhuǎn)矩控制是利用空間矢量坐標(biāo)的概念,在定子坐標(biāo)系下分析交流電動(dòng)機(jī)的數(shù)學(xué)模型,控制電動(dòng)機(jī)的磁鏈和轉(zhuǎn)矩,通過檢測(cè)定子電阻來達(dá)到觀測(cè)定子磁鏈的目的,因此省去了矢量控制等復(fù)雜的變換計(jì)算,系統(tǒng)直觀、簡(jiǎn)潔,計(jì)算速度和精度都比矢量控制方式有所提高。即使在開環(huán)的狀態(tài)下,也能輸出100%的額定轉(zhuǎn)矩,對(duì)于一臺(tái)變頻器向多臺(tái)電動(dòng)機(jī)供電的多拖動(dòng)具有負(fù)荷平衡功能。
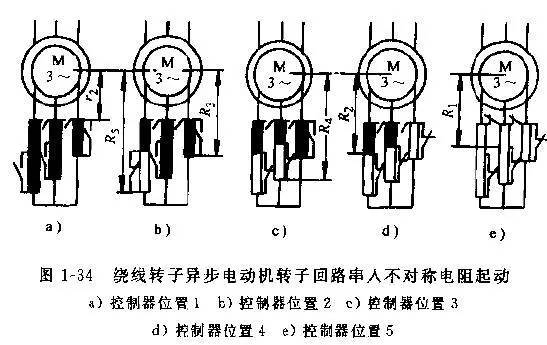
轉(zhuǎn)子回路串電阻調(diào)速
在轉(zhuǎn)子回路串一變阻器調(diào)速只適用于繞線式異步電動(dòng)機(jī)。調(diào)速時(shí)的接線圖和起動(dòng)時(shí)的一樣,所不同的是:一般起動(dòng)變阻器都是短時(shí)工作的,而調(diào)速用的變阻器應(yīng)為長(zhǎng)期工作的。
調(diào)速時(shí)的物理過程和直流電動(dòng)機(jī)在電樞回路中串電阻調(diào)速一樣。在變阻器的電阻增加最初瞬間,電動(dòng)機(jī)的的轉(zhuǎn)速還來不及改變,因此轉(zhuǎn)子電流減小,相應(yīng)地電磁轉(zhuǎn)矩也減小,電動(dòng)機(jī)的轉(zhuǎn)速開始下降,而轉(zhuǎn)子的電勢(shì)開始增加,隨之轉(zhuǎn)子電流又回頭增加。這個(gè)過程一直進(jìn)行到轉(zhuǎn)子電流增加到與其對(duì)應(yīng)的電磁轉(zhuǎn)矩和總負(fù)載轉(zhuǎn)矩互相平衡為止,這時(shí)電動(dòng)機(jī)在一個(gè)較低轉(zhuǎn)速下穩(wěn)定運(yùn)行。
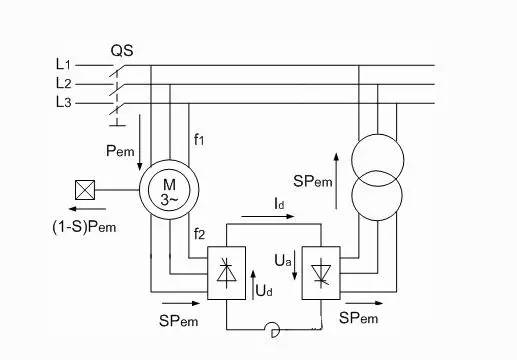
當(dāng)轉(zhuǎn)子回路串入調(diào)速電阻時(shí),若電動(dòng)機(jī)總負(fù)載轉(zhuǎn)矩保持不變,電動(dòng)機(jī)從一個(gè)運(yùn)行點(diǎn)到另一個(gè)運(yùn)行點(diǎn),相應(yīng)地轉(zhuǎn)差率從S1增加到S2,轉(zhuǎn)速則從n1(1-S1)降到n1(1-S2)。增加調(diào)速電阻,轉(zhuǎn)速便越下降。
從轉(zhuǎn)子回路串電阻調(diào)速曲線圖(略)可見在一定的調(diào)速電阻變化范圍內(nèi),調(diào)速范圍的大小隨負(fù)載的輕重而變化;在空載下調(diào)速,則調(diào)速范圍甚小,實(shí)際上達(dá)不到調(diào)速的目的。
此外,在恒轉(zhuǎn)矩調(diào)速時(shí),從電磁轉(zhuǎn)矩參數(shù)表達(dá)式(略)可知,恒轉(zhuǎn)矩調(diào)速時(shí)轉(zhuǎn)差率s將隨轉(zhuǎn)子回路總電阻成正比例變化,總電阻增加一倍,則轉(zhuǎn)差率也增加一倍,于是根據(jù)等效電路可見:恒轉(zhuǎn)矩調(diào)速時(shí),定、轉(zhuǎn)子電流、輸入功率、氣隙磁場(chǎng)和電磁功率皆不變,而與轉(zhuǎn)子回路串入電阻的大小無關(guān)。
于是,如果把轉(zhuǎn)速調(diào)得愈低,即轉(zhuǎn)差率愈大,就需要在轉(zhuǎn)子回路串入愈大的電阻,隨之轉(zhuǎn)子銅耗就愈大,電動(dòng)機(jī)效率就愈低。可見這種調(diào)速方法很不經(jīng)濟(jì),降低轉(zhuǎn)速所減少的輸出功率全部消耗于調(diào)速電阻的銅耗上。另一缺點(diǎn)是轉(zhuǎn)子加電阻后電動(dòng)機(jī)的機(jī)械特性變軟,即負(fù)載變化時(shí)轉(zhuǎn)速將發(fā)生顯著變化。
來源:傳動(dòng)在線
審核編輯:湯梓紅
-
電動(dòng)機(jī)
+關(guān)注
關(guān)注
74文章
4109瀏覽量
96201 -
異步電機(jī)
+關(guān)注
關(guān)注
6文章
427瀏覽量
32845 -
定子
+關(guān)注
關(guān)注
0文章
145瀏覽量
24751
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
異步電機(jī)主要的三種調(diào)速方法解析
如何對(duì)三相異步電機(jī)SPWM變頻調(diào)速系統(tǒng)模型進(jìn)行Simulink仿真
介紹異步電機(jī)的工作原理及調(diào)速方法
基于DSP的異步電機(jī)SVPWM變頻調(diào)速控制系統(tǒng)
基于SVPWM的異步電機(jī)變頻調(diào)速系統(tǒng)的研究
基于SVPWM的異步電機(jī)矢量控制調(diào)速系統(tǒng)仿真
異步電機(jī)調(diào)壓調(diào)速與內(nèi)補(bǔ)償
異步電機(jī)主要的三種調(diào)速方法解析
變頻器在變頻調(diào)速時(shí)對(duì)普通異步電機(jī)的影響
異步電機(jī)結(jié)構(gòu)組成
單相異步電機(jī)調(diào)速方法及調(diào)速原理
異步電機(jī)是什么 啟動(dòng)和調(diào)速方法
電磁調(diào)速異步電機(jī)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論