

01 摘要
大多同時(shí)定位于建圖(SLAM)系統(tǒng)在傳統(tǒng)上假定的都是靜態(tài)世界,這與現(xiàn)實(shí)世界的場(chǎng)景不符。為了使機(jī)器人能夠在動(dòng)態(tài)環(huán)境中安全導(dǎo)航和規(guī)劃,必須采用能夠處理動(dòng)態(tài)目標(biāo)的表示。動(dòng)態(tài)SLAM是SLAM研究中的一個(gè)新興領(lǐng)域,它不僅提高了整體系統(tǒng)的精度,還提供了目標(biāo)運(yùn)動(dòng)的額外估計(jì)。
最新的文獻(xiàn)提供了動(dòng)態(tài)SLAM的兩種主要表示方法,將動(dòng)態(tài)目標(biāo)點(diǎn)在世界坐標(biāo)系或者目標(biāo)坐標(biāo)系中表示。盡管在局部參考系中表達(dá)目標(biāo)點(diǎn)可能看上去很直觀,但是這可能無(wú)法獲得最精確、最魯棒的解決方案。
本文對(duì)各種動(dòng)態(tài)SLAM公式進(jìn)行深入分析,確定解決該問(wèn)題的最佳方法。基于此目的,本文引入一種使用GTSAM的與前端無(wú)關(guān)的框架——用于評(píng)估各種動(dòng)態(tài)SLAM公式。
02 介紹
同時(shí)定位和建圖(SLAM)是一個(gè)已被研究三十余載的問(wèn)題。SLAM系統(tǒng)使機(jī)器人能夠構(gòu)建環(huán)境的表示,同時(shí)還能在該環(huán)境中定位自身。當(dāng)下的許多SLAM解決方案是在假設(shè)環(huán)境大部分由靜態(tài)元素組成的前提下執(zhí)行的,很遺憾,這在動(dòng)態(tài)目標(biāo)豐富的現(xiàn)實(shí)世界中可能不成立。
傳統(tǒng)上,SLAM系統(tǒng)將與運(yùn)動(dòng)目標(biāo)相關(guān)聯(lián)的傳感器數(shù)據(jù)作為異常值,并且在估計(jì)過(guò)程中剔除它們,而忽略任何與動(dòng)態(tài)目標(biāo)相關(guān)的有用信息。將目標(biāo)集成到SLAM框架中的優(yōu)勢(shì)是,生成的地圖可以直接向?qū)Ш胶腿蝿?wù)規(guī)劃系統(tǒng)通知待估計(jì)的目標(biāo)運(yùn)動(dòng)和場(chǎng)景結(jié)構(gòu),提高了機(jī)器人系統(tǒng)在復(fù)雜動(dòng)態(tài)環(huán)境中的魯棒性。因此,SLAM中的一項(xiàng)新興策略是結(jié)合對(duì)場(chǎng)景中動(dòng)態(tài)目標(biāo)的觀測(cè)結(jié)果,并且估計(jì)其運(yùn)動(dòng)。在本文中,我們將這種系統(tǒng)稱(chēng)為動(dòng)態(tài)SLAM系統(tǒng)。
最近,已經(jīng)探索了多目標(biāo)視覺(jué)里程計(jì)和基于圖優(yōu)化的動(dòng)態(tài)SLAM系統(tǒng),以基于靜態(tài)點(diǎn)和動(dòng)態(tài)點(diǎn)觀測(cè)結(jié)果來(lái)聯(lián)合定位機(jī)器人并且估計(jì)靜態(tài)結(jié)構(gòu)和場(chǎng)景中剛體目標(biāo)的運(yùn)動(dòng)/軌跡。這些系統(tǒng)通常采用局部、滑動(dòng)窗口或者批量?jī)?yōu)化技術(shù),文獻(xiàn)中給出了這些優(yōu)化問(wèn)題中表示變量的各種方式。在設(shè)計(jì)SLAM系統(tǒng)時(shí),選擇合適的表示是非常重要的,因?yàn)檫@決定了系統(tǒng)的魯棒性、精度和效率。因此,對(duì)不同表示進(jìn)行正規(guī)分析是至關(guān)重要的,這些表示清楚地描述了此類(lèi)系統(tǒng)成功執(zhí)行的情況。
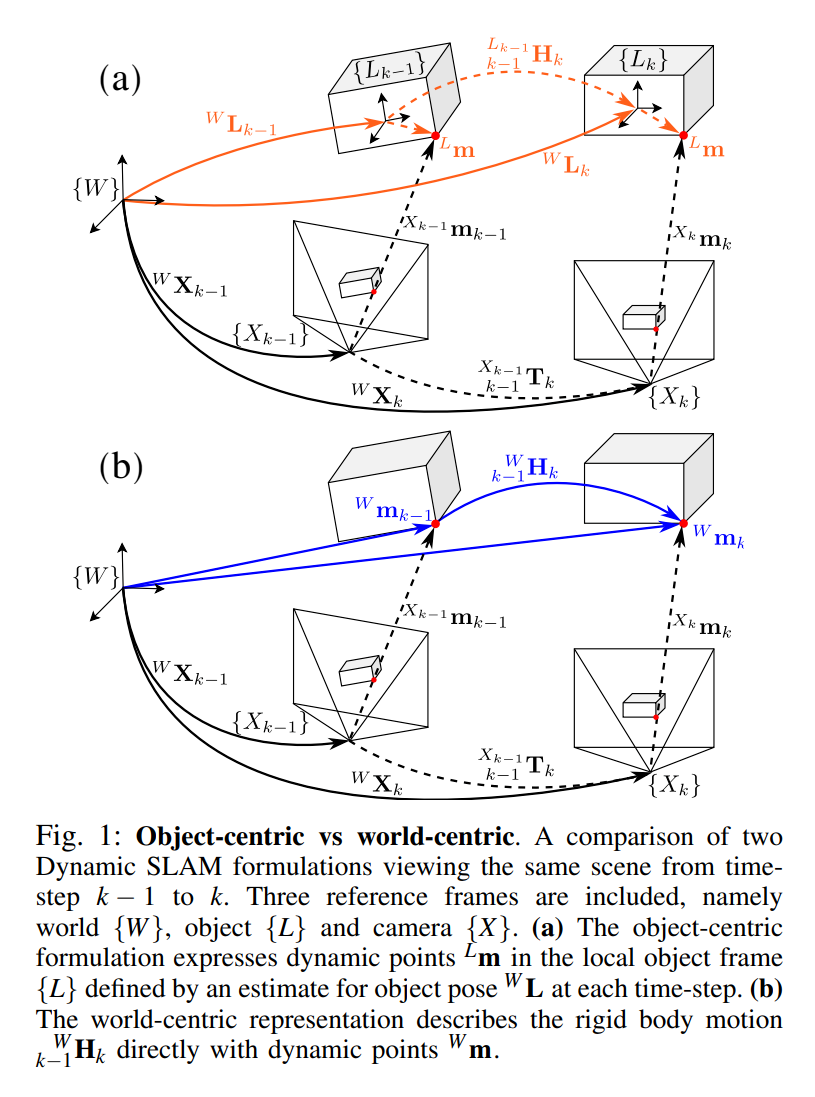
圖1 展示了以目標(biāo)為中心 vs 以世界為中心。圖1(a)展示了一種更直觀的方法,其中觀測(cè)到的動(dòng)態(tài)點(diǎn)在其對(duì)應(yīng)目標(biāo)的局部坐標(biāo)系中表示,本文稱(chēng)之為以目標(biāo)為中心。
局部表達(dá)的點(diǎn)可以被建模為相對(duì)于目標(biāo)坐標(biāo)系的靜態(tài)點(diǎn),以增強(qiáng)剛體假設(shè),因此可以由因子圖中的單個(gè)狀態(tài)變量來(lái)表示。然而,目標(biāo)坐標(biāo)系的位姿是無(wú)法直接觀測(cè)的,并且當(dāng)根據(jù)目標(biāo)的部分觀測(cè)進(jìn)行估計(jì)時(shí)可能是不可靠的。
一種替代方法是在已知的參考坐標(biāo)系中表達(dá)動(dòng)態(tài)點(diǎn),例如相機(jī)坐標(biāo)系或者地圖/世界坐標(biāo)系。我們先前的工作VDO-SLAM證明了SE(3)運(yùn)動(dòng)可以在包含世界坐標(biāo)系的任何參考坐標(biāo)系中表達(dá)。根據(jù)這一點(diǎn)并且通過(guò)在世界坐標(biāo)系中表示動(dòng)態(tài)目標(biāo)點(diǎn),避免了估計(jì)目標(biāo)位姿,并且產(chǎn)生了精確的結(jié)果。本文將這種表示稱(chēng)為以世界為中心,如圖1(b)所示。
本文探索了如何在動(dòng)態(tài)SLAM系統(tǒng)中更好地表示目標(biāo)。為此,我們引入了一個(gè)基于因子圖的優(yōu)化框架,用于開(kāi)發(fā)和測(cè)試不同的動(dòng)態(tài)SLAM表示。基于最先進(jìn)的文獻(xiàn),我們實(shí)現(xiàn)了以世界和目標(biāo)為中心的表示,嚴(yán)格分析了由此產(chǎn)生的SLAM系統(tǒng)的精度和魯棒性。基于這一分析,本文提出了動(dòng)態(tài)SLAM表示,其最精確且最魯棒地估計(jì)相機(jī)位姿和目標(biāo)運(yùn)動(dòng)。
本文的貢獻(xiàn)如下:
1)本文引入了一組詳細(xì)的數(shù)學(xué)公式和圖結(jié)構(gòu),用于在SLAM問(wèn)題中估計(jì)自身運(yùn)動(dòng)和跟蹤動(dòng)態(tài)目標(biāo);
2)本文使用現(xiàn)實(shí)世界數(shù)據(jù)集嚴(yán)格分析、評(píng)估和測(cè)試各種表示;
3)本文提供了一個(gè)使用GTSAM的動(dòng)態(tài)SLAM優(yōu)化框架,該框架實(shí)現(xiàn)了本文中提出的各種表示。
03 背景
3.1 參考坐標(biāo)系和符號(hào)
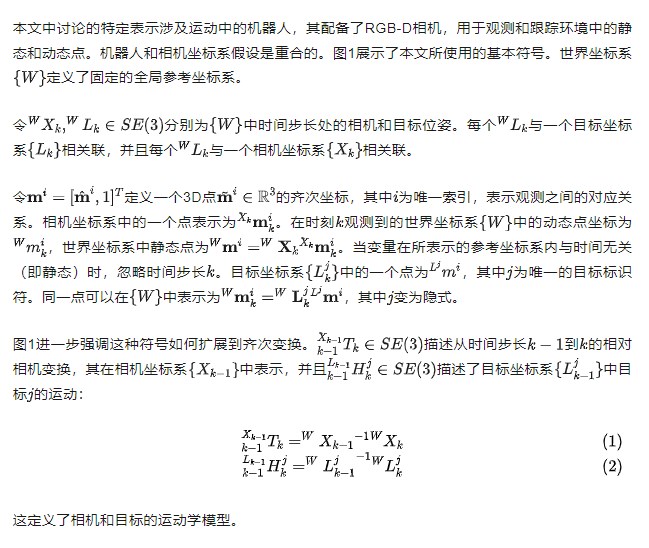
3.2 位姿變換和坐標(biāo)系變化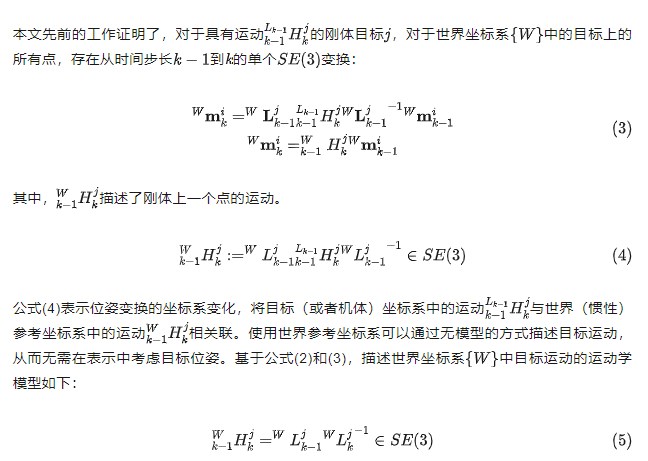
04 表示
本節(jié)引入了若干種表示,在基于因子圖的動(dòng)態(tài)SLAM估計(jì)框架中定義變量并且建模這些變量之間的關(guān)系(因子),類(lèi)似于最先進(jìn)的方法。本文將這些表示分為以世界為中心或者以目標(biāo)為中心。
4.1 SLAM前端
4.2 以世界為中心的表示
4.3 以目標(biāo)為中心的表示
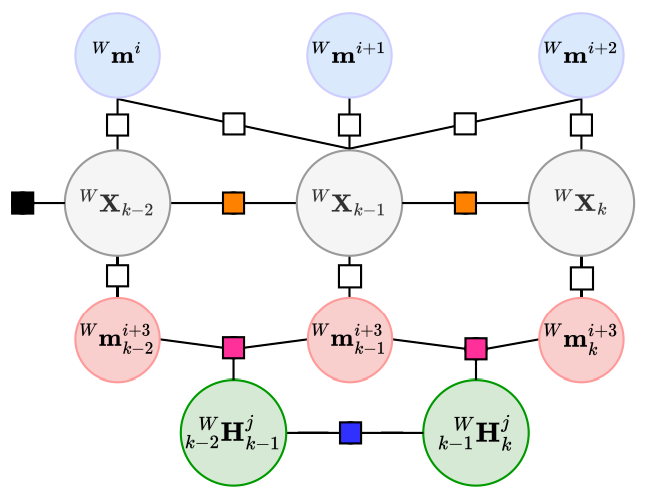
以目標(biāo)為中心的方法估計(jì)世界坐標(biāo)系中的相機(jī)位姿、靜態(tài)點(diǎn)、目標(biāo)運(yùn)動(dòng)和位姿。對(duì)應(yīng)的因子圖如圖3所示,其中我們強(qiáng)調(diào)了用于實(shí)驗(yàn)的公式的不同變體。
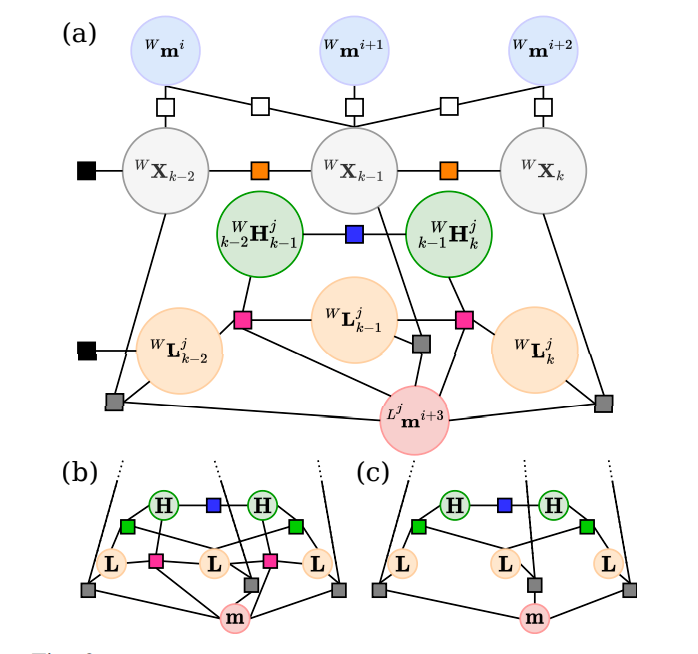
圖3 展示了以目標(biāo)為中心表示的因子
4.4 目標(biāo)運(yùn)動(dòng)學(xué)因子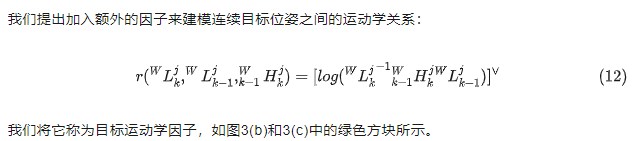
05 總結(jié)與未來(lái)展望
本文對(duì)動(dòng)態(tài)SLAM的多種解決方案進(jìn)行了全面分析,并且在現(xiàn)有現(xiàn)實(shí)世界數(shù)據(jù)集上評(píng)估了所提出的表示。為此,我們使用GTSAM開(kāi)發(fā)了一個(gè)與前端無(wú)關(guān)的優(yōu)化框架,其可以輕松地實(shí)現(xiàn)并且測(cè)試不同的配置。根據(jù)動(dòng)態(tài)目標(biāo)及其對(duì)應(yīng)點(diǎn)觀測(cè)在因子圖中的表示方式,這些表示分為以目標(biāo)為中心和以世界為中心。以目標(biāo)為中心的表示更為直觀,因?yàn)榛趧傮w假設(shè),目標(biāo)點(diǎn)相對(duì)于目標(biāo)局部坐標(biāo)系是靜態(tài)的。然而,本文分析表明,以世界為中心的表示可以產(chǎn)生更精確的目標(biāo)運(yùn)動(dòng)估計(jì),同時(shí)在相機(jī)位姿估計(jì)方面也表現(xiàn)更好,并且在優(yōu)化過(guò)程中展現(xiàn)更好的穩(wěn)定性。在未來(lái),我們計(jì)劃對(duì)研究成果進(jìn)行正式描述,也可以提前提供明確的指導(dǎo)方案。
審核編輯:劉清
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29489瀏覽量
211558 -
RGB
+關(guān)注
關(guān)注
4文章
803瀏覽量
59591 -
SLAM
+關(guān)注
關(guān)注
24文章
435瀏覽量
32317
原文標(biāo)題:悉尼大學(xué)新作:坐標(biāo)系在動(dòng)態(tài)SLAM中究竟有多重要?
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
CAD制圖軟件新手攻略:坐標(biāo)系及標(biāo)注坐標(biāo)
內(nèi)存時(shí)序究竟有多重要呢?究竟該如何去選擇內(nèi)存條呢?
解決電壓方程在靜止坐標(biāo)系與運(yùn)動(dòng)坐標(biāo)系轉(zhuǎn)換問(wèn)題
坐標(biāo)系與魚(yú)雷運(yùn)動(dòng)參數(shù)

OPENGL坐標(biāo)系介紹 世界坐標(biāo)系和當(dāng)前繪圖坐標(biāo)系區(qū)別

帶你來(lái)剖析機(jī)器人的坐標(biāo)系吧!
自動(dòng)駕駛各個(gè)坐標(biāo)系

三坐標(biāo)如何建立坐標(biāo)系?

世界坐標(biāo)系、相機(jī)坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系

深度剖析機(jī)器人的四大坐標(biāo)系

機(jī)器人中都有哪些坐標(biāo)系

應(yīng)用衛(wèi)星通信領(lǐng)域的一個(gè)坐標(biāo)轉(zhuǎn)換過(guò)程—機(jī)體坐標(biāo)系與ENU坐標(biāo)系的轉(zhuǎn)換

三坐標(biāo)測(cè)量機(jī)的機(jī)器坐標(biāo)系和原點(diǎn)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論