 基于NID-SLAM對神經SLAM在動態環境下的性能提升
基于NID-SLAM對神經SLAM在動態環境下的性能提升
1. 寫在前面
今天筆者為大家推薦一篇動態環境下視覺SLAM的最新工作,實現了精確的位姿估計,并能建立動態場景下的稠密地圖。整個框架基于NeRF實現,可惜算法沒有開源,但是這個設計思路可以做為參考。
2. 摘要
神經隱式表示已經被探索用于增強視覺SLAM算法,特別是在提供高保真度的稠密地圖方面。現有的方法在靜態場景中運行穩健,但與移動物體引起的干擾相抗衡。本文提出了NID - SLAM,顯著提高了神經SLAM在動態環境下的性能。我們提出了一種新的方法來增強語義掩碼中不準確的區域,特別是邊緣區域。利用深度圖像中存在的幾何信息,該方法能夠準確地去除動態物體,從而降低相機漂移的概率。此外,我們引入了針對動態場景的關鍵幀選擇策略,增強了相機對大尺度目標的跟蹤魯棒性,提高了建圖效率。在公開的RGB - D數據集上的實驗表明,本文方法在動態環境下的跟蹤精度和建圖質量方面優于競爭性的神經SLAM方法。
3. 效果展示
輸入帶有動態目標的RGB-D序列,可以生成全局靜態地圖,這個空洞補全效果很不錯。
4. 具體原理是什么?
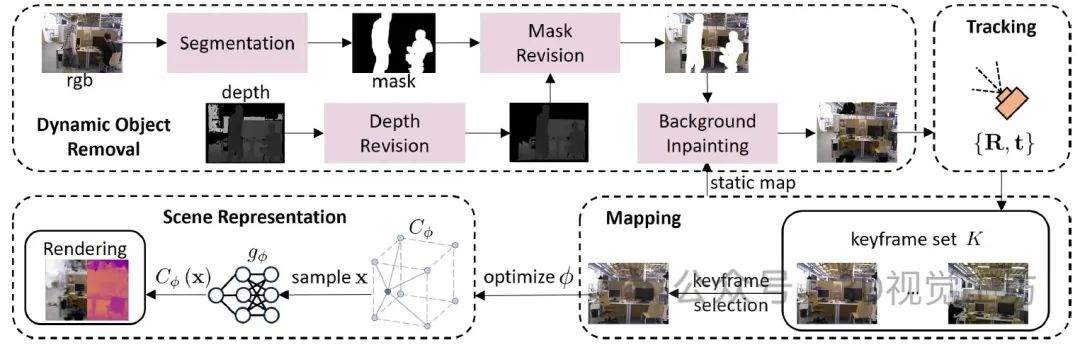
系統概述,包括:1 )動態物體移除:通過語義分割和掩膜修正,精確地移除RGB - D圖像中的動態物體,然后徹底地恢復被遮擋的背景。2 ) .跟蹤:通過最小化損失來優化相機位姿{ R,t }。3 )建圖:采用掩膜引導策略選擇關鍵幀,優化特征網格場景表示。4 )場景表示:通過面聚焦點采樣實現預測顏色和深度值的高效繪制。
5. 和其他SOTA方法對比如何?
TUM數據集上相機跟蹤結果,評價指標是ATE RMSE [ m ] (↓),表示相關文獻未提及這個數據。

TUM數據集動態序列的建圖結果。
6. 總結
這篇文章介紹了一種動態RGB-D神經SLAM方法NID - SLAM。證明了神經SLAM能夠在動態場景中實現高質量的建圖和合理的空洞補全。利用動態物體移除,可以實現穩定的相機跟蹤,并創建可重用的靜態地圖。去除動態物體后準確獲得的圖像,也可以用于進一步的應用,如機器人導航。
作者也提到了NID -- SLAM的局限性:實時性受限于分割網絡的速度,需要實現分割質量和速度之間的平衡。結合神經網絡的預測能力,而不是僅僅依靠靜態地圖,可以得到更全面、更準確的背景修復。
審核編輯:黃飛
-
神經網絡
+關注
關注
42文章
4771瀏覽量
100720 -
SLAM
+關注
關注
23文章
423瀏覽量
31824
原文標題:來了!NID-SLAM:動態環境也能搞NeRF SLAM!
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是SLAM?視覺SLAM怎么實現?


AGV激光雷達SLAM定位導航技術
SLAM技術的應用及發展現狀
讓機器人完美建圖的SLAM 3.0到底是何方神圣?
SLAM大法之回環檢測
激光SLAM與VSLAM定位導航方法誰主沉浮?
SLAM技術目前主要應用在哪些領域
激光SLAM與視覺SLAM有什么區別?
SLAM的相關知識點分享

視覺SLAM是什么?視覺SLAM的工作原理 視覺SLAM框架解讀






 工商網監
工商網監
評論