 上海汽檢×TüV南德從聯合國法規《自動車道保持系統ALKS》淺談智駕安全
上海汽檢×TüV南德從聯合國法規《自動車道保持系統ALKS》淺談智駕安全
上海機動車檢測認證技術研究中心有限公司(以下簡稱“上海汽檢”)與TüV南德意志集團(以下簡稱“TüV南德”)致力聯動中國車企共創高級別自動駕駛海外認證三方合作新范式,三方共同打造出海測試認證的最佳實踐,以促進智能駕駛行業安全合規發展。
聯合國法規UN- R157型式批準是汽車品牌自證智能駕駛能力領先的技術高地之一,雙方將圍繞UN-R157共同淺談智能駕駛安全。 安全是自動駕駛的最基本要求,驗證確認自動駕駛系統滿足法規要求是商業化落地的前提。本文將圍繞國際法規UN-R157提出的ALKS系統的功能需求和安全需求,基于聯合國WP.29 自動駕駛測試評價方法(VMAD)工作組提出的NATM(New Assessment/Testing Method)自動駕駛驗證確認框架,進一步分析多支柱法(Multi-pillar Approach)在ALKS驗證確認過程中的實踐方案。 多支柱法來源于NATM,是由VMAD基于當前最佳實踐提出的驗證自動駕駛系統安全的框架,目前在國際上取得了廣泛的認同。多支柱法包括一個場景目錄和五種驗證方法。
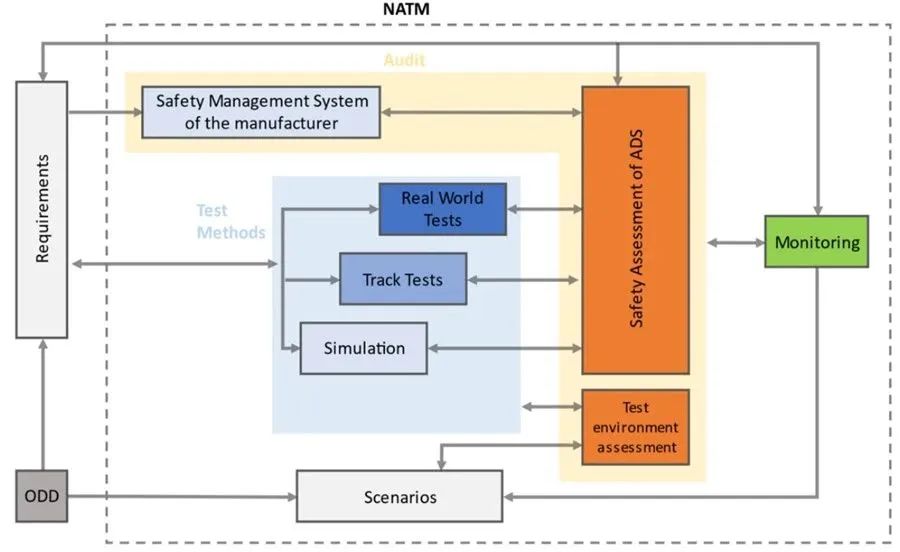
上圖為VMAD多支柱法框架
UN-R157提出的ALKS系統的需求和ODD (Operational Design Domain,運行設計域)是NATM多支柱法的主要輸入來源。其中,仿真/虛擬測試、封閉場地測試、實際道路測試將利用各自的優勢覆蓋不同場景下的測試驗證。審核與評估旨在確保ALKS系統提供方已建立完善的安全管理體系,并評估基于該安全管理體系完成安全風險管控活動,同時評估不同測試活動之間協同互補以實現總體測試場景覆蓋度。而運行中監控及上報則關注產品進入市場后的安全相關數據收集和分析,為前期審核評結論估持續提供證據,并在實際運行中反饋和調整系統需求,以及擴展研發過程的場景庫。
ALKS系統的場景庫來源于功能定義過程中確定的ODD,識別和定義測試場景需考慮如駕駛員行為、事故統計數據、特定場景中交通參與人員行為特征、車輛動力學特征、基于場景屬性隨機生成的合理場景等不同因素。多支柱法中定義不同測試方式的目的是通過利用不同測試手段的優勢互補,達成基于場景測試的覆蓋率目標,其中測試手段的優缺點對比梳理如下。

仿真/封閉場地/實際道路測試
仿真測試環境可以提供實車測試過程中搭建難度較大或危險系數較高的場景,例如多交通參與者的復雜交互場景或必然發生危險碰撞場景等。仿真測試同時對仿真工具鏈和仿真模型提出嚴格要求,只有同一場景在仿真測試和實車測試中結果保持一致的條件下,仿真測試結果才能被采信。仿真測試工具鏈及場景中使用的模型在應用于ALKS系統測試驗證前,需通過工具鏈和仿真模型的可信度評估。
封閉場地則要求具備高度還原測試場景的能力,用于ALKS系統在不同風險的運行場景中的實車測試。同時,針對同一場景,基于封閉場地的測試結果可用于驗證仿真測試環境的可信度。
實際道路測試執行的前提是在仿真測試和封閉場地測試中,ALKS系統已經滿足預期的功能及安全需求。在實際道路測試過程中,ALKS系統對實際環境的感知能力和對車輛的實際控制策略將會成為測試的重要部分。同時,實際道路測試過程產生的記錄數據可用于驗證仿真測試和封閉場地測試的可信度,實際道路測試過程中產生的未知場景也可用于擴展當前場景庫。

圖源shutterstock,ID:646014577
審核與評估
安全管理體系是主機廠進行ALKS系統全生命周期管理的基礎,其中涉及到研發、生產、運營和報廢等階段,以及各階段使用的流程、方法論和工具等。同時,安全管理體系主要從人員、組織和技術等三個不同方面進行管理。針對安全管理體系的審核主要基于汽車相關的安全標準和法規,主機廠建立安全管理體系時,需充分考慮風險和安全管理、安全文化建設、組織內部溝通機制、組織對外溝通機制和組織層級質量管理體系等不同維度的體系需求。面向ALKS功能的安全管理體系,主機廠同時需要建立功能上市后的監控及上報流程及功能升級流程。
安全評估主要關注從識別ALKS系統相關的安全風險到系統研發過程中針對識別出來的風險進行的一系列安全相關活動,最后通過驗證和確認來確保系統不存在不合理的安全風險。UN-R157明確提出車輛控制需求、人機交互需求、車內外感知需求、數據記錄需求、網絡安全和軟件升級需求。因此,在UN-R157的合規安全評估過程中,相關法規需求會基于不同測試方法的驗證結果完成安全評估。
運行中監控及上報
多支柱法的三種不同測試方法,以及審核與評估,旨在完成自動駕駛系統上市前的安全驗證和確認。運行中監控及上報主要錨定系統上市后實際運行中持續收集數據,通過收集到的數據證明自動駕駛系統在實際運行中沒有引發不合理的安全風險。該驗證方法有別于安全需求中涉及到的系統狀態實時監控,運行中監控及上報更側重于安全相關數據的監控及上報,例如風險控制策略觸發事件,駕駛員誤用事件,車輛控制權轉移事件等安全相關事件。
圖源shutterstock,ID:1125744236
各支柱間如何協同
多支柱法提出的初衷,旨在通過結合不同支柱的優點并用于自動駕駛系統的驗證和確認工作中,以實現客觀且可復現的驗證和確認過程,同時將安全相關的驗證工作延伸到車輛上市后的整個生命周期中。不同測試方法的選取主要取決于具體的需求和ODD,高風險的測試場景可以在仿真環境下進行測試;低風險的測試場景可以通過不同的測試手段進行測試,同時封閉場地測試或實際道路測試的結果可用于驗證仿真環境的可信度。審核與評估不僅用于自動駕駛系統的安全評估,也用于組織層級安全管理體系的評估,確保在產品研發過程中識別出來的安全風險可以通過有效的驗證策略控制在合理范圍內。運行中監控及上報確保自動駕駛系統在整個生命周期中,可以通過運行中采集到的數據,將安全風險反饋給相關機構,實現功能的迭代并將安全風險控制在合理范圍內。
上海汽檢自動駕駛仿真測試及場地測試能力
自動駕駛仿真實驗室現已具備智能駕駛全鏈路仿真測試服務能力,涵蓋仿真場景庫、場景采集服務、SIL/MIL/HIL/VIL/DIL在環測試、線控系統測試等4大項13小項仿真測試服務,可為主機廠提供定制化整車自動駕駛系統(感知、決策、執行)在環仿真測試,支持攝像頭暗箱/注入式在環測試、毫米波雷達暗箱/注入式硬件在環、激光雷達注入式硬件在環、線控制動系統在環測試、線控轉向系統在環測試、線控驅動控制系統在環等測試方式。
在場地資源上,臨港智能網聯汽車綜合測試示范區,是交通運輸部、工業和信息化部在 2019 年聯合認定的三家智能網聯汽車自動駕駛封閉場地測試基地之一,還包含高快速路、城市道路在內的智能網聯汽車開放測試道路,具備收費站、匝道、高快速路長直道、彎道、坡道、隧道、交通信號燈、雨霧模擬器等基礎設施;廣德測試基地建有直徑300m的動態廣場和長度約2.2km的容納10個車道的長直道;在設備資源上,擁有T-Box、ASEVA、VideoVbox等行業內一流的數據采集設備,支持自動駕駛測試數據記錄評估。
-
智能駕駛
+關注
關注
3文章
2507瀏覽量
48743 -
仿真測試
+關注
關注
0文章
84瀏覽量
11303 -
自動駕駛
+關注
關注
784文章
13787瀏覽量
166408
原文標題:報道 | 上海汽檢×TüV南德從聯合國法規《自動車道保持系統ALKS》淺談智駕安全
文章出處:【微信號:汽車與新動力,微信公眾號:汽車與新動力】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

廣電計量與上海汽檢簽署戰略合作協議
TüV南德與中汽數據解讀汽車行業循環再生規范,共促產業綠色轉型
霞智科技Titan 810榮獲TüV南德歐盟CE-MD認證證書

聚焦歐盟電池法規,TüV南德與天合儲能簽署電池法規合作協議




TüV南德:建立可持續網絡安全是對企業數字化保護的重中之重

TüV南德推出產品溯源管理平臺PTM,助供應鏈提升透明度


TüV南德攜亞馬遜云科技舉辦消費類產品強制法規網絡安全研討會






 工商網監
工商網監
評論