 3D納米制造的軟體微型機器人,超靈敏彈簧作為板載傳感器和執行器
3D納米制造的軟體微型機器人,超靈敏彈簧作為板載傳感器和執行器
微尺度生物和特定的活動細胞利用基于蛋白質的彈簧狀響應結構來感知、抓取和移動。在人造微機械上實現這種生物機械傳導功能,以用于單細胞操作具有挑戰性,這是由于需要一種生物適用的納米尺度彈簧系統,并對皮牛頓級別(piconewton-scale)的力具有足夠大且可編程的應變響應。
據麥姆斯咨詢報道,近日,中國科學院深圳先進技術研究院、德國開姆尼茨工業大學(Chemnitz University of Technology)、德累斯頓工業大學(Dresden University of Technology)等機構的研究人員組成的團隊在Nature Nanotechnology 期刊上發表了題為“3D nanofabricated soft microrobots with super-compliant picoforce springs as onboard sensors and actuators”的論文,提出了一種具有皮牛級力靈敏度的超順應性納米結構彈簧系統(皮牛級彈簧),可通過3D納米加工技術集成到單細胞尺度的功能性軟體微機械中。研究人員展示了這些皮牛級彈簧組件作為能量轉換機制的有效設計可編程性,可用于集成構建定制的軟體微機械,并在單細胞尺度上具有板載傳感和執行功能,可用于微型機器人的抓取和運動。將有源軟體彈簧集成到3D納米制造中,為創建與生物實體無干擾交互的生物相容性軟體微型機器人提供了一條途徑。
該皮牛級彈簧組件是通過彈性體光刻膠復合物的光交聯制造的(圖1a)。光刻膠包含一種提供彈性的彈性體、一種提供生物相容性和與水溶液氫鍵親和力的水凝膠,以及嵌入的提供磁化的約20 nm的超順磁納米顆粒(MNP)。圖1b顯示了所制造的皮牛級彈簧示例的高分辨率3D重建圖像。具有懸臂形、弧形、螺旋形和鋸齒形等各種幾何形狀的皮牛級彈簧組件可進行3D納米制造,以滿足不同軟體微機械的順應性和復雜性要求,從而感知和施加皮牛級的力(圖1c和1d)。
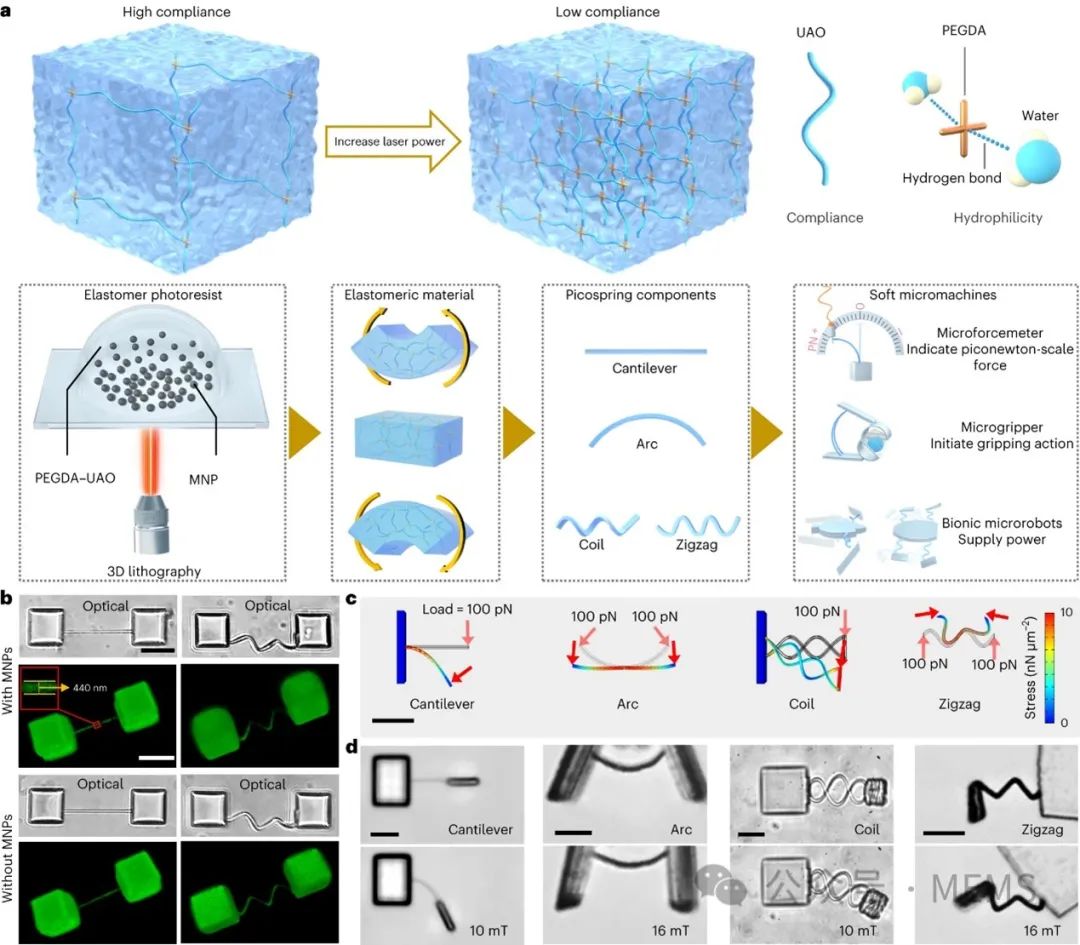
圖1 具有可編程彈性分布的基于皮牛級彈簧的微機械的制造
研究人員利用光學阱基于經典懸臂梁法表征材料的彈性(圖2a和2b)。在相同的捕獲功率下,以較低激光功率制造的懸臂梁呈現出較高的偏轉。如圖2c所示,當激光功率從5.00 mW增加到6.25 mW時,彈性材料的楊氏模量已經增加了5倍以上,并在增加到25 mW時其值增加了200倍以上,這使得通過局部編程激光功率對皮牛級彈簧材料的彈性進行寬范圍編程成為可能。
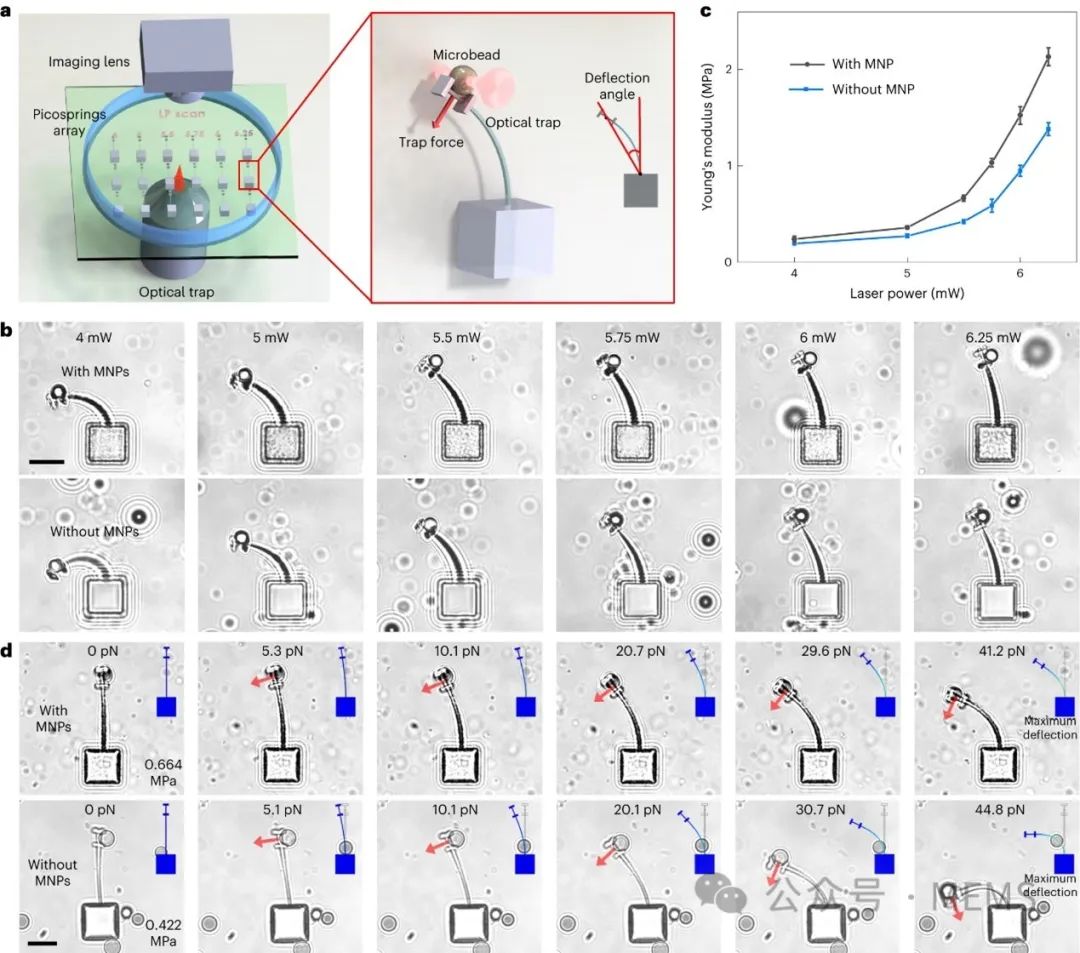
圖2 基于懸臂梁方法的皮牛級彈簧材料的力學表征
得益于其力指示器功能,皮牛級彈簧還可以提供輕柔的力,并可根據其變形程度進行調節,以啟動復雜的機械動作。研究人員展示了一種長度為40 μm的磁性微夾具,它使用皮牛級彈簧作為彈性自閉合末端執行器進行單細胞操作,如圖3a和3b所示。其皮牛級彈簧采用弧形,可在有限的長度內獲得更高的角偏轉。在高磁場(例如16 mT)下,磁扭矩將磁性微夾具指狀物的易磁軸與磁場方向對齊,從而打開微夾具。當磁場減弱時,它逐漸關閉。
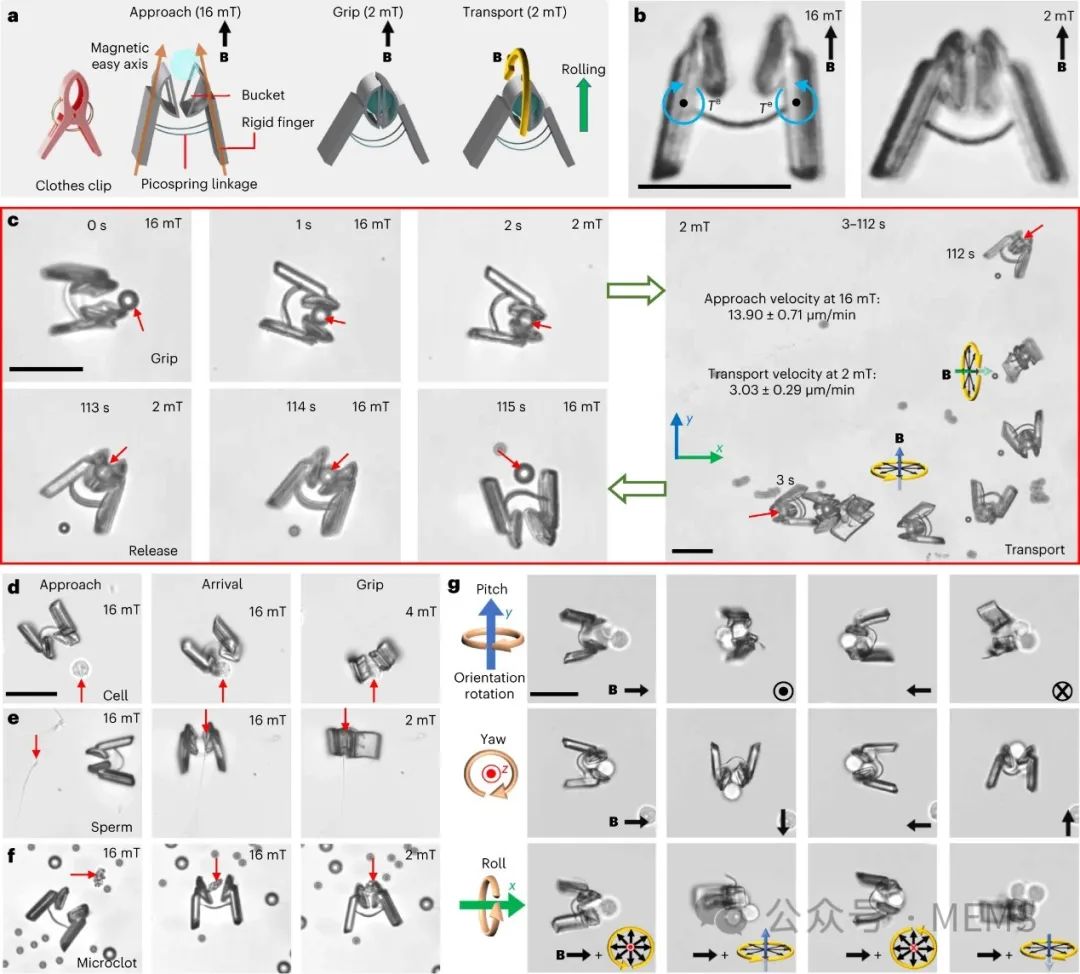
圖3 用于啟動對細胞物體抓取動作的超順應性皮牛級彈簧
與傳統的彈簧相似,本研究提出的皮牛級彈簧也可以通過編程釋放存儲的能量來為機器提供動力。圖4a顯示的是微振蕩器陣列的驅動。如圖4b所示,磁彈性材料使人們能夠構建具有板載執行機構的復雜的基于皮牛級彈簧的微型機器人,例如,帶有螺旋形彈簧的全磁性“微型企鵝”(長度為20 μm)和帶有鋸齒形皮牛級彈簧的部分磁性“微型龜”(長度為50?μm)。這些微型機器人被設計為利用其可移動磁性部件作為受外部磁場驅動的彈簧卷繞器。圖4c、4f分別顯示了微型企鵝和微型龜的變形模式。
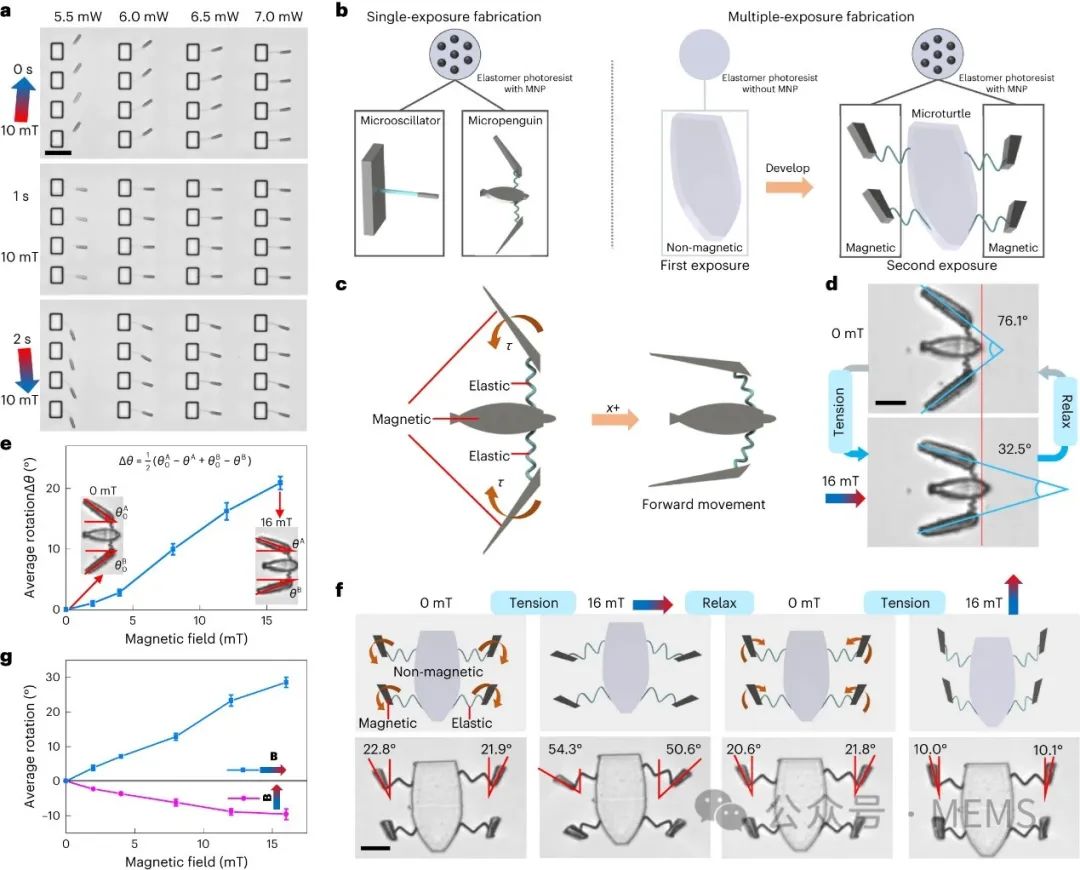
圖4 驅動微型機器人的超順應性皮牛級彈簧
皮牛級彈簧系統通過將磁勢能穩定地轉換為動能來抵消流體耗散,從而成為軟體微型機器人的板載執行器。圖5a說明了用于控制微型企鵝的方向切換策略。作為一種軟體執行器,皮牛級彈簧還可以通過僅進行二維形態變換來實現微型機器人的運動,而無需平面外運動。圖5c和5d顯示了一種用于控制部分磁性微型龜的順序運動策略。
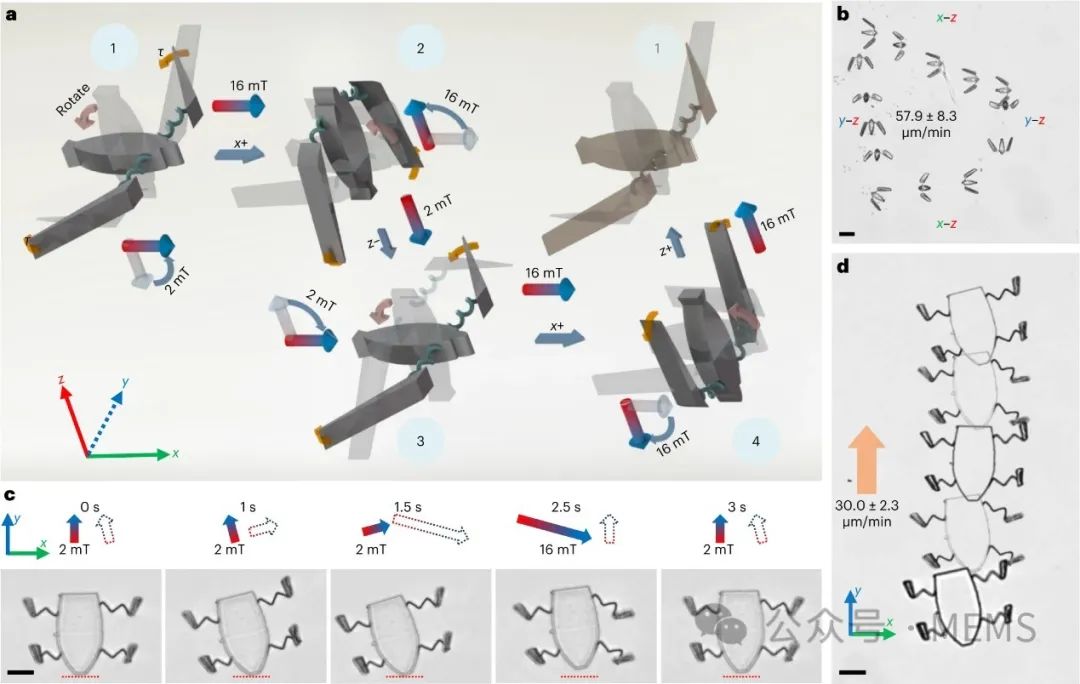
圖5 基于皮牛級彈簧的微型機器人的運動
綜上所述,這項研究展示了具有可編程彈性分布的基于皮牛級彈簧的軟體微型機器人的3D納米制造。皮牛級彈簧可實現微米級的變形,可直接用于控制生物條件下單細胞尺度的微機械的復雜動作。不同配置的皮牛級彈簧可以處理不同的任務。利用皮牛級彈簧變形與其輸出彈性力之間的相關性,研究人員開發了一種用于操縱單細胞的具有可調節夾持力的純機械微夾具。除了對抓取動作的開關控制之外,皮牛級彈簧系統還能夠為不受束縛的微型機器人持續提供動力。所提出的皮牛級彈簧具有超低力變形,有望用于構建片上AFM、微加速器和微生物活檢鑷等新型柔性微機械。
論文鏈接:
https://doi.org/10.1038/s41565-023-01567-0
-
傳感器
+關注
關注
2550文章
51038瀏覽量
753086 -
3D
+關注
關注
9文章
2875瀏覽量
107486 -
微型機器人
+關注
關注
0文章
111瀏覽量
19557
原文標題:3D納米制造的軟體微型機器人,超靈敏彈簧作為板載傳感器和執行器
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
微型拉壓力傳感器—中航電測機器人用系列傳感器

Sonair推出用于機器人避障的3D超聲波傳感器
3D激光線掃輪廓傳感器在汽車行業的汽車車縫檢測的應用

清華大學:軟體機器人柔性傳感技術最新研究進展

3D霍爾效應位置傳感器的基本原理及其應用案例
機器人控制系統的基本單元有哪些
3D打印遙控氣墊船、微型步行機器人、變壓器式實驗室電源|DF創客周刊(第77期)
工業機器人的觸覺傳感器有哪些?傳感器作用是什么?
基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性






 工商網監
工商網監
評論