") 用這套組件來設(shè)計(jì)智能運(yùn)動控制的電機(jī)驅(qū)動系統(tǒng)!
用這套組件來設(shè)計(jì)智能運(yùn)動控制的電機(jī)驅(qū)動系統(tǒng)!
在向智能制造轉(zhuǎn)變的過程中,采用先進(jìn)技術(shù)提高了產(chǎn)量、生產(chǎn)率、靈活性、效率和安全性,同時降低了成本。在這一過程中,智能運(yùn)動控制是關(guān)鍵因素。為此,通常需要對老舊工廠進(jìn)行更新改造,將定速電機(jī)及控制器更換為性能優(yōu)越的運(yùn)動控制設(shè)備。這些設(shè)備依靠先進(jìn)的檢測技術(shù)實(shí)現(xiàn)精確的運(yùn)動和功率控制。為了獲得最佳的工作流程和生產(chǎn)靈活性,設(shè)計(jì)人員還必須在生產(chǎn)設(shè)備和制造執(zhí)行系統(tǒng)之間建立實(shí)時連接。
目前,有許多先進(jìn)技術(shù)和系統(tǒng)級解決方案可用于向智能運(yùn)動控制的遷移,但設(shè)計(jì)人員往往只能靠自己來拼湊系統(tǒng)。這種情況正在發(fā)生改變,現(xiàn)在已經(jīng)有了全面的的成套解決方案,可協(xié)助設(shè)計(jì)人員開始運(yùn)動控制設(shè)計(jì)。其中包括用于多軸控制電機(jī)速度和扭矩的隔離式電流檢測和位置反饋元件,以及用于機(jī)器健康監(jiān)測以減少計(jì)劃外停機(jī)時間的傳感器。此外,還包括高速網(wǎng)絡(luò)接口,以便在機(jī)器與更高級別的控制和管理網(wǎng)絡(luò)之間共享數(shù)據(jù)。
本文簡要討論了改進(jìn)運(yùn)動控制的重要性。然后介紹AnalogDevices用于智能運(yùn)動控制的解決方案,包括電源、檢測和網(wǎng)絡(luò)組件,并討論如何使用這些解決方案。
為什么需要更智能化的電機(jī)控制
電機(jī)是工業(yè)運(yùn)動控制的基礎(chǔ),占工業(yè)用電量的 70%。該工業(yè)用電量約占全球用電量的 50%。因此,人們在提高運(yùn)動控制效率方面投入了大量精力,且智能電機(jī)控制帶來了諸多好處。
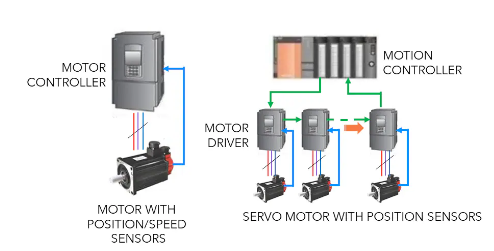
早期的運(yùn)動控制依賴基本的電網(wǎng)連接式電機(jī),如今已發(fā)展成為復(fù)雜的多軸伺服電機(jī)機(jī)器人執(zhí)行器。這種演化式發(fā)展跟蹤了日益增長的復(fù)雜性,以滿足實(shí)現(xiàn)智能制造要求的更高效率、性能、可靠性和自給自足的需求(圖 1)。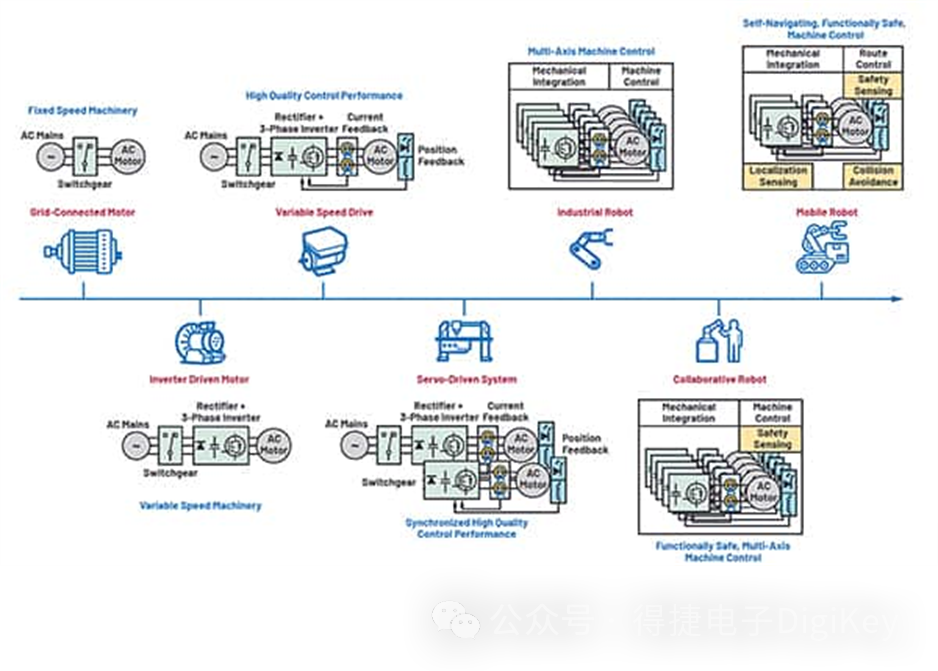
圖 1:運(yùn)動控制從恒速、連網(wǎng)電機(jī)發(fā)展到配備多軸伺服電機(jī)機(jī)器人執(zhí)行器的智能運(yùn)動控制系統(tǒng)。(圖片來源:Analog Devices Inc.)
電機(jī)控制類型包括:
恒速:最古老、最基本的運(yùn)動控制裝置,基于以固定速度運(yùn)行的電網(wǎng)連接式三相 AC 電機(jī)。由開關(guān)設(shè)備提供開關(guān)控制和保護(hù)電路。通過機(jī)械方式減少所需的輸出。
由變頻器驅(qū)動的電機(jī):通過增加整流器、DC 母線和三相逆變器級來產(chǎn)生可變頻率、可變電壓源,然后應(yīng)用于電機(jī)以實(shí)現(xiàn)變速控制。這種由變頻器驅(qū)動的電機(jī)可在適合負(fù)載和應(yīng)用的最佳轉(zhuǎn)速下運(yùn)行,從而實(shí)現(xiàn)大幅降低能耗。
變速驅(qū)動器 (VSD):VSD 用于需要更加精確地控制電機(jī)速度、位置和扭矩的應(yīng)用,通過在基本的調(diào)壓型變頻驅(qū)動器中增加電流和位置測量傳感器來實(shí)現(xiàn)更精確的控制。
伺服驅(qū)動系統(tǒng):多個 VSD 可同步至多軸伺服驅(qū)動系統(tǒng),以完成更復(fù)雜的運(yùn)動,適用于需要極其精確位置反饋的計(jì)算機(jī)數(shù)控 (CNC) 機(jī)床等應(yīng)用。CNC 加工通常使用五軸協(xié)調(diào),也可使用多達(dá)十二軸的協(xié)調(diào)運(yùn)動。
機(jī)器人:工業(yè)機(jī)器人、協(xié)作機(jī)器人和移動機(jī)器人
工業(yè)機(jī)器人將多軸運(yùn)動控制、機(jī)械集成和先進(jìn)的控制軟件結(jié)合在一起,通常可以實(shí)現(xiàn)沿六軸進(jìn)行三維定位。
協(xié)作機(jī)器人 (cobot) 的目的是與人類一起安全運(yùn)行。通過增加安全檢測以及功率和力量限制功能,協(xié)作機(jī)器人在工業(yè)機(jī)器人平臺上制造,以實(shí)現(xiàn)功能安全的機(jī)器人工作伙伴。
同樣,移動機(jī)器人也使用功能安全型機(jī)器控制,但這類機(jī)器人在機(jī)器人功能的基礎(chǔ)上增加了定位檢測、路線控制和防碰撞功能。
在運(yùn)動控制系統(tǒng)發(fā)展的每一個階段,其復(fù)雜性一直在增加,而且往往是大幅增加。推動智能運(yùn)動系統(tǒng)發(fā)展的關(guān)鍵因素有四個:
降低能耗
快捷生產(chǎn)
數(shù)字化轉(zhuǎn)型
減少停機(jī)時間,確保最大限度地提高資產(chǎn)利用率
采用高效率電機(jī)和低損耗 VSD,以及在運(yùn)動控制應(yīng)用中增加智能化,是通過智能制造實(shí)現(xiàn)顯著能效的關(guān)鍵因素。
快捷生產(chǎn)取決于可快速重新配置的生產(chǎn)線。這種靈活性就能滿足消費(fèi)者對小批量多樣化產(chǎn)品的波動需求,從而要求生產(chǎn)設(shè)備具有更強(qiáng)的適應(yīng)性。工業(yè)機(jī)器人在執(zhí)行復(fù)雜和重復(fù)性操作方面發(fā)揮著舉足輕重的作用,從而提高了吞吐量和生產(chǎn)率。
數(shù)字化轉(zhuǎn)型包含將運(yùn)動控制和來自整個生產(chǎn)設(shè)施的大量傳感器數(shù)據(jù)聯(lián)網(wǎng)并實(shí)時共享這些數(shù)據(jù)的能力。通過這種連接,基于云的計(jì)算和人工智能 (AI) 算法可以優(yōu)化生產(chǎn)工作流程,提高資產(chǎn)利用率。
資產(chǎn)利用率是各種新型商業(yè)模式的基礎(chǔ),它關(guān)注的是工廠資產(chǎn)的生產(chǎn)率,而不僅僅是初始安裝成本。系統(tǒng)供應(yīng)商對根據(jù)這些資產(chǎn)的正常運(yùn)行時間或生產(chǎn)率來收取服務(wù)費(fèi)的做法越來越感興趣。這種方法利用預(yù)見性維護(hù)服務(wù),依靠對每臺機(jī)器資產(chǎn)的實(shí)時監(jiān)控來提高生產(chǎn)率,最大限度地減少計(jì)劃外停機(jī)時間。
智能運(yùn)動控制的組件要求
設(shè)計(jì)人員必須認(rèn)識到,為典型電機(jī)驅(qū)動信號鏈中的多個設(shè)計(jì)領(lǐng)域提供系統(tǒng)級解決方案,以滿足智能運(yùn)動應(yīng)用要求(圖 2)。
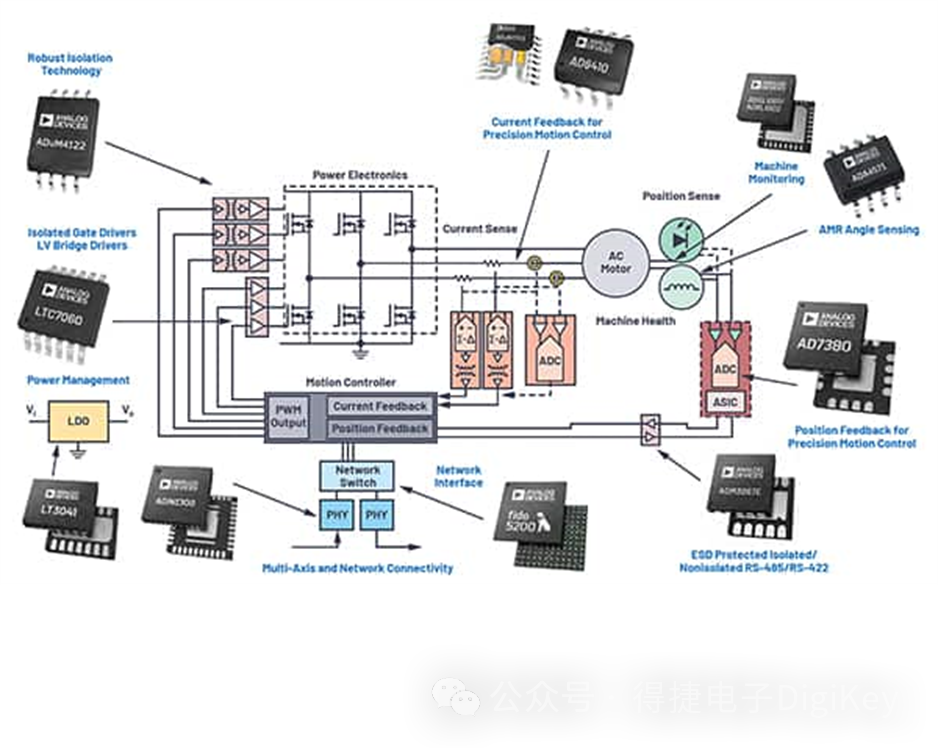
圖 2:所示組件解決方案可在智能運(yùn)動應(yīng)用的六個關(guān)鍵領(lǐng)域達(dá)到更高水平的性能。(圖片來源:Analog Devices, Inc.)
設(shè)計(jì)人員必須優(yōu)先考慮的關(guān)鍵領(lǐng)域包括電力電子器件、運(yùn)動控制、電流檢測、位置檢測、網(wǎng)絡(luò)接口和機(jī)器健康監(jiān)測。Analog Devices 針對每個領(lǐng)域都提供多種器件,以便設(shè)計(jì)人員升級舊設(shè)計(jì)或重新開始設(shè)計(jì)。
電力電子設(shè)備
在電機(jī)驅(qū)動系統(tǒng)中,電力電子設(shè)備有助于將直流轉(zhuǎn)換為脈寬調(diào)制 (PWM) 電源輸入。
電機(jī)驅(qū)動系統(tǒng)中的功率轉(zhuǎn)換始于通常來自交流電源的高壓 DC 電源。如圖 2 所示,電力電子部分采用具有 MOSFET 的三相半橋拓?fù)浣Y(jié)構(gòu)。上方的 MOSFET 的柵極相對于地是浮動的,需要隔離式驅(qū)動器。Analog Devices 的ADUM4122CRIZ便是合適之選。這是一款隔離式柵極驅(qū)動器,可提供有效值 (RMS) 高達(dá) 5 kV 的隔離。通過將高速互補(bǔ)金屬氧化物半導(dǎo)體 (CMOS) 和單片變壓器技術(shù)相結(jié)合,該器件實(shí)現(xiàn)了高隔離能力。這款柵極驅(qū)動器具有可調(diào)壓擺率控制功能,可最大限度地減少開關(guān)功率損耗和電磁干擾 (EMI)。如果使用氮化鎵 (GaN) 或碳化硅 (SiC) 器件,則此項(xiàng)功能尤為重要,因?yàn)檫@些器件的開關(guān)速度更快。
下方的 MOSFET 的源元件以地為基準(zhǔn),可使用 Analog Devices 的LTC7060IMSE#WTRPBF器件(具有浮動地的 100 V 半橋驅(qū)動器)。
低壓側(cè)和高壓側(cè)驅(qū)動器的輸出級都是浮動的,沒有接地。這種獨(dú)特的雙浮動結(jié)構(gòu)使柵極驅(qū)動器的輸出更加穩(wěn)健,對接地噪聲的敏感度更低。此外,這些器件還集成了具有可編程死區(qū)時間的自適應(yīng)擊穿保護(hù)功能,以防止兩個半橋開關(guān)器件同時開啟。
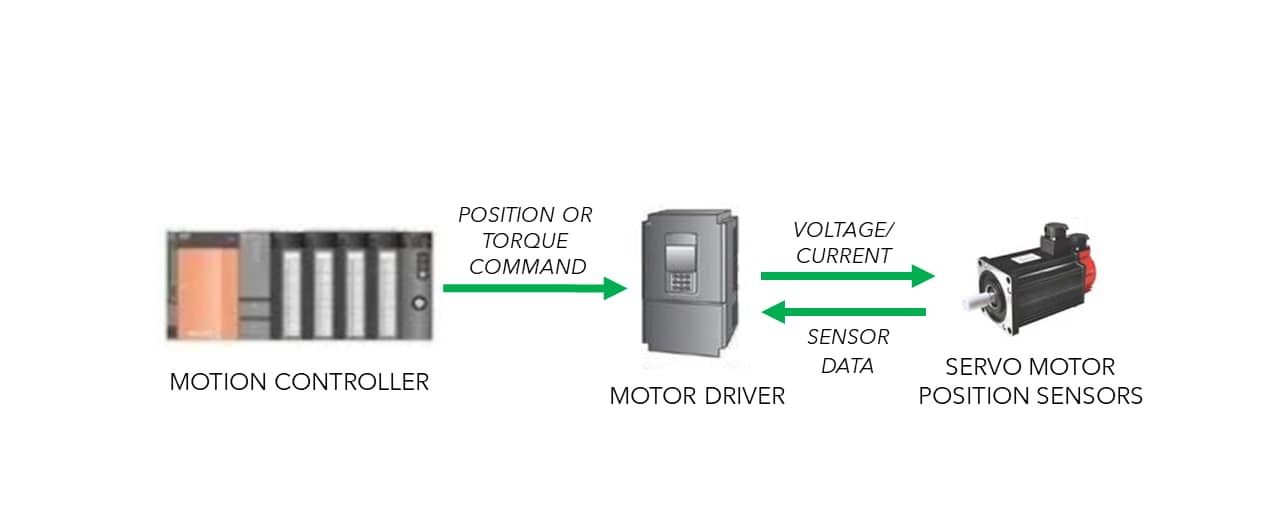
運(yùn)動控制器
運(yùn)動控制器是運(yùn)動控制系統(tǒng)的大腦。作為中央處理器,運(yùn)動控制性器產(chǎn)生可驅(qū)動電力電子器件的 PWM 信號。這種信號基于中央控制中心的指令和諸如電流、位置和溫度等電機(jī)的反饋信息。控制器會根據(jù)這些數(shù)據(jù)決定電機(jī)的速度、方向和扭矩。控制器通常位于遠(yuǎn)程位置,通過 FPGA 或?qū)S锰幚砥鲗?shí)現(xiàn)其功能,因此需要隔離式通信鏈路。
為此,可使用 Analog Devices 的ADM3067ETRZ-EP等串行數(shù)據(jù)鏈路。這是一款靜電放電 (ESD) 保護(hù)型全雙工、每秒 50 Mbps RS485 收發(fā)器。經(jīng)過配置,該器件可提供從位置反饋傳感器返回到運(yùn)動控制器的高帶寬串行通信。該串行線路具有高達(dá)±12 kV 的靜電放電保護(hù),工作溫度范圍為 -55°C 至 +125°C。
電流檢測
來自電機(jī)的電流反饋信息是進(jìn)行控制所需的主要反饋參數(shù)。由于電流反饋決定了運(yùn)動控制系統(tǒng)的整體控制帶寬和動態(tài)響應(yīng),因此反饋機(jī)制必須具有高精度和高帶寬,以確保精確的運(yùn)動控制。
常用的電流測量技術(shù)有兩種:
分流式測量要求插入一個低值電阻或分流器,且與被測導(dǎo)體串聯(lián)。然后測量分流器上的差壓,通常借助高分辨率模數(shù)轉(zhuǎn)換器 (ADC) 完成測量。分流式電流測量受到并聯(lián)電阻器壓降和功率耗散的限制,僅限于中低電流應(yīng)用。
磁性電流檢測技術(shù)采用非接觸式各向異性磁阻 (AMR) 測量法,通過評估導(dǎo)體附近的磁場來測量電流。AMR 器件的電阻使用電阻電橋進(jìn)行測量。該電阻值隨磁場的變化而變化,因此電流也發(fā)生變化。
磁性電流測量避免了并聯(lián)電阻器中的壓降和隨之產(chǎn)生的功率損耗,因此更適合大電流測量。測量也與待測導(dǎo)體之間采用了電氣隔離。
需要測量隔離電流時,可使用 Analog Devices 的ADUM7701-8BRIZ-RL器件。這是一款高性能、16 位二階 Σ-Δ ADC,可將來自檢測電阻上的電流檢測壓降的模擬輸入信號轉(zhuǎn)換為高速、單比特?cái)?shù)字隔離式數(shù)據(jù)流。
AD8410AWBRZ高帶寬電流檢測放大器是另一種電流測量器件。這是一款增益為 20、帶寬為 2.2 MHz 的差分放大器,具有低失調(diào)漂移(~1 微伏/攝氏度 (μV/°C))。該器件的直流共模抑制比(CMRR) 高達(dá) 123 dB,可以在共模輸入電壓高達(dá)100 V 的情況下進(jìn)行雙向電流測量。
位置檢測
以 AMR 磁性位置傳感器為基礎(chǔ)的旋轉(zhuǎn)位置檢測技術(shù)為光學(xué)編碼器提供了性價比更高的替代方案。這類傳感器還具有在工業(yè)環(huán)境中堅(jiān)固耐用的優(yōu)點(diǎn),適合經(jīng)常暴露在灰塵和振動環(huán)境中。電機(jī)軸角反饋可用于伺服系統(tǒng)中的直接控制位置,或用于確定轉(zhuǎn)速。
AnalogDevices 的ADA4571BRZ-RL是一款 AMR 傳感器,在封裝內(nèi)集成了信號調(diào)節(jié)和 ADC 驅(qū)動電路(圖 3)。
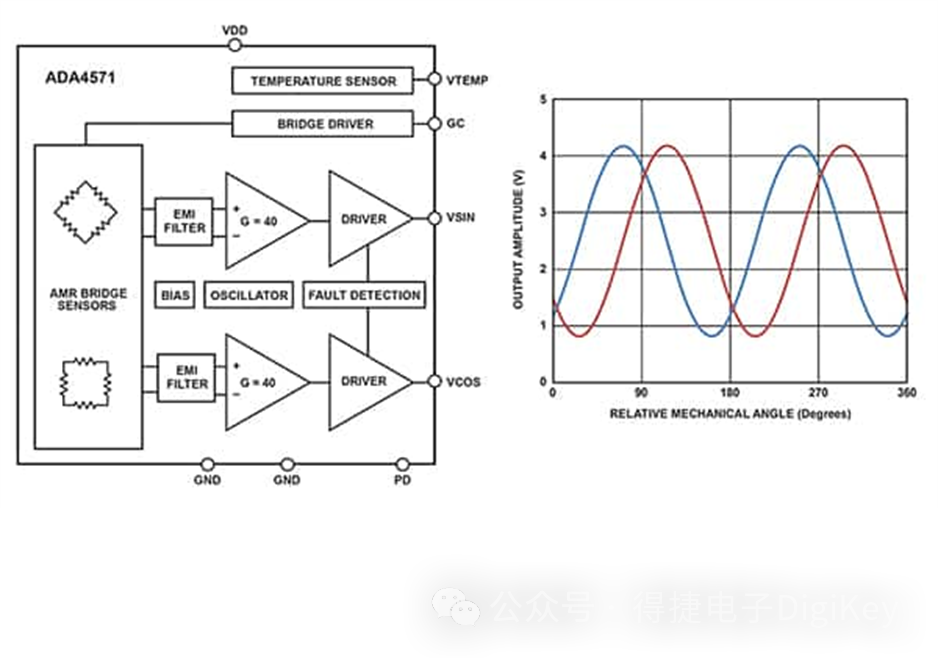
圖 3:所示為 ADA4571BRZ-RL 角度傳感器的功能框圖,以及正弦和余弦輸出與旋轉(zhuǎn)角度的函數(shù)關(guān)系圖。(圖片來源:Analog Devices, Inc.)
ADA4571BRZ-RL是一款磁阻角度傳感器,使用雙溫度補(bǔ)償 AMR 傳感器檢測 180° (±90°) 范圍內(nèi)的軸角度,精度誤差 <0.1°(在壽命/溫度范圍內(nèi) <0.5°)。該器件可產(chǎn)生正弦和余弦單端模擬輸出,顯示周圍磁場的角位置。該器件可在磁場惡劣的環(huán)境中工作,并且不會因氣隙過大而導(dǎo)致角度讀數(shù)誤差增大。
角度傳感器的輸出可連接 Analog Devices 的AD7380BCPZ-RL7雙通道、16 位輸入、逐次逼近寄存器 (SAR) ADC。該 ADC 同時對兩個差分輸入通道進(jìn)行采樣,采樣率高達(dá)每秒 4 MSPS。內(nèi)部超采樣功能可提高性能。過采樣是提高 ADC 精度的常用技術(shù)。通過對模擬輸入的多個采樣進(jìn)行捕捉和平均,該功能可使用正常平均或滾動平均過采樣模式來降低噪聲。過采樣還有助于在較慢的運(yùn)行條件下實(shí)現(xiàn)更高的精度。
網(wǎng)絡(luò)接口
智能制造依賴智能運(yùn)動應(yīng)用網(wǎng)絡(luò),這種網(wǎng)絡(luò)可在工廠車間、機(jī)器與中央控制、管理網(wǎng)絡(luò)之間共享數(shù)據(jù)。這種數(shù)據(jù)共享要求強(qiáng)大的連接能力。為此,設(shè)計(jì)人員可以使用 Analog Devices 的低功耗、低延遲以太網(wǎng)物理層 (PHY),包括ADIN1300CCPZ以太網(wǎng) PHY 收發(fā)器。ADIN1300CCPZ 的數(shù)據(jù)傳輸速率為 10 Mbits/s、100 Mbits/s 或 1000 Mbits/s,可在環(huán)境溫度高達(dá) 105°C 的惡劣工業(yè)環(huán)境下工作。
交換機(jī)用于路由以太網(wǎng)連接。Analog Devices 提供了一款工業(yè)以太網(wǎng)第 2 層嵌入式雙端口交換機(jī)FIDO5200BBCZ。該交換機(jī)在 10 Mbits/s 和 100 Mbits/s 速度下符合 IEEE 802.3 標(biāo)準(zhǔn),支持半雙工和全雙工模式,以支持 PROFINET、Ethernet/IP、EtherCAT、Modbus TCP 和 Ethernet POWERLINK 工業(yè)以太網(wǎng)協(xié)議。
機(jī)器健康狀況
進(jìn)行機(jī)器健康狀況監(jiān)測時,利用傳感器測量振動、沖擊和溫度等物理參數(shù),以實(shí)時了解機(jī)器狀況。通過在標(biāo)準(zhǔn)運(yùn)動控制運(yùn)行期間記錄這些數(shù)據(jù)并進(jìn)行長期分析,就能準(zhǔn)確評估機(jī)器的機(jī)械的健康狀況。這種數(shù)據(jù)驅(qū)動型方法可實(shí)現(xiàn)預(yù)見性維護(hù)計(jì)劃,不僅能延長機(jī)器的運(yùn)行壽命,還能顯著減少計(jì)劃外停機(jī)時間。
應(yīng)用機(jī)器健康狀況時,需要在電機(jī)上安裝振動和沖擊傳感器。這方面的產(chǎn)品如ADXL1001BCPZ-RL±100 g 微機(jī)電系統(tǒng) (MEMS) 加速計(jì),這是一款低噪聲傳感器,其 -3 dB 帶寬為 11 kHz。該器件是壓電傳感器的高帶寬、低功耗替代品。對于需要沿三個軸進(jìn)行測量的應(yīng)用,ADXL371是合適之選。
結(jié)束語
智能運(yùn)動控制是實(shí)現(xiàn)智能工廠的關(guān)鍵,需要經(jīng)過精心選擇的電子元件才能有效實(shí)施。如圖所示,這些組件中有許多是經(jīng)過精心挑選的,可用于啟動設(shè)計(jì)。這些元件包括用于驅(qū)動電機(jī)的電力電子設(shè)備、用于提供精確反饋數(shù)據(jù)以實(shí)現(xiàn)精確運(yùn)動控制的電流和位置傳感器、用于提供系統(tǒng)層面預(yù)見性以優(yōu)化生產(chǎn)流程的工業(yè)網(wǎng)絡(luò)連接,以及用于實(shí)現(xiàn)機(jī)器健康監(jiān)測以減少意外停機(jī)時間并延長資產(chǎn)運(yùn)行壽命的振動和沖擊傳感器。
審核編輯:劉清
-
運(yùn)動控制
+關(guān)注
關(guān)注
4文章
581瀏覽量
32876 -
位置傳感器
+關(guān)注
關(guān)注
3文章
266瀏覽量
27491 -
智能制造
+關(guān)注
關(guān)注
48文章
5570瀏覽量
76368 -
電機(jī)驅(qū)動系統(tǒng)
+關(guān)注
關(guān)注
0文章
31瀏覽量
5750
原文標(biāo)題:有捷徑!用這套組件來設(shè)計(jì)智能運(yùn)動控制的電機(jī)驅(qū)動系統(tǒng)
文章出處:【微信號:得捷電子DigiKey,微信公眾號:得捷電子DigiKey】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
步進(jìn)電機(jī)運(yùn)動控制策略
ADI電機(jī)運(yùn)動控制解決方案 驅(qū)動智能運(yùn)動新時代

運(yùn)動控制系統(tǒng)的基本方程
使用基于PC的控制軟件和單電纜技術(shù)簡化運(yùn)動控制系統(tǒng)設(shè)計(jì)并降低伺服電機(jī)成本
直線電機(jī)技術(shù)及其發(fā)展的深度解析
運(yùn)動控制的定義、電機(jī)控制和運(yùn)動控制的區(qū)別
用于運(yùn)動控制和驅(qū)動的系統(tǒng)設(shè)計(jì)
如何從電機(jī)控制轉(zhuǎn)換為運(yùn)動控制
如何從電機(jī)控制轉(zhuǎn)換為運(yùn)動控制
運(yùn)動控制系統(tǒng)的核心應(yīng)用

電機(jī)控制系統(tǒng)的組成及其作用 | 驅(qū)動電機(jī)控制系統(tǒng)工作原理

智能車的運(yùn)動控制系統(tǒng)介紹
運(yùn)動控制系統(tǒng)由什么組成
電機(jī)驅(qū)動器的智能控制算法研究
【精準(zhǔn)高效 驅(qū)動智能運(yùn)動新時代】深入探討ADI電機(jī)運(yùn)動控制方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論