

隨機訪問存儲器(RAM)分為靜態RAM(SRAM)和動態RAM(DRAM)。由于動態存儲器存儲單元的結構非常簡單,所以它能達到的集成度遠高于靜態存儲器。但是動態存儲器的存取速度不如靜態存儲器快。
RAM的動態存儲單元是利用電容可以存儲電荷的原理制成的。由于存儲單元的機構能夠做得很簡單,所以在大容量、高集成度的RAM中得到了普遍的應用。但是由于電容的容量很小,而漏電流又不可能絕對等于零,所以電荷保存的時間有限。為了及時補充漏掉的電荷以避免存儲的信號丟失,必須定時地給電容補充電荷,通常將這種操作稱為刷新。
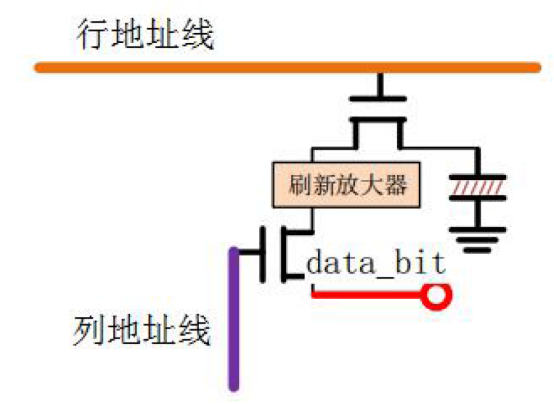
行列地址線被選中后,數據線(data_bit)直接和電容相連接。當寫入時,數據線給電容充放電;讀取時,電容將數據線拉高或者置低。
SDRAM 的全稱即同步動態隨機存儲器(Synchronous Dynamic Random Access Memory);這里的同步是指其時鐘頻率與對應控制器的系統時鐘頻率相同,并且內部命令的發送與數據傳輸都是以該時鐘為基準;動態是指存儲陣列需要不斷的刷新來保證數據不丟失。
SDR SDRAM中的SDR是指單數據速率,即每一根數據線上,每個時鐘只傳輸一個bit的數據。SDR SDRAM的時鐘頻率可以達到100MHz以上,按照100MHz的速率計算,一片16位數據寬度的SDR SDRAM的讀寫數據帶寬可以達到1.6Gbit/s。
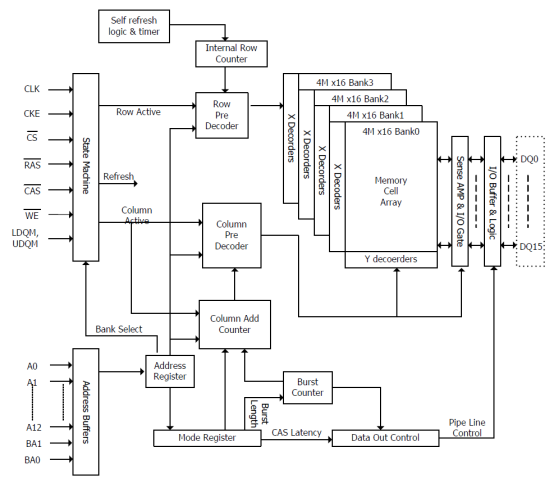
SANXIN – B01的開發板上有一個容量為256Mbit(16M x 16bit)的SDR SDRAM(H57V2562GTR)。其內部存儲時,分為了4個獨立的區域(BANK),每個bank為4Mx16bit的存儲空間;每個bank在存儲時,按照二維的方式進行存儲,利用行列來進行確定,有8192行(13bit地址線),有512列(9bit地址線),8192 x 512為4M的存儲量。
在進行指定某個地址時,共需要2位bank地址,13位行地址,9位列地址,合計共24位地址。但是在SDR SDRAM的指定某個地址時,行地址和列地址不是同時給出,SDR SDRAM采用行列地址線復用,所以地址線合計為2(bank 地址)+13(行、列地址復用)。
SDR SDRAM需要時鐘端和時鐘使能端。SDR SDRAM所有的操作都依靠于此時鐘;當時鐘使能端無效時,SDR SDRAM自動忽略時鐘上升沿。
SDR SDRAM擁有四個命令控制線,分別為CS、RAS、CAS、WE。組成的命令表如下:
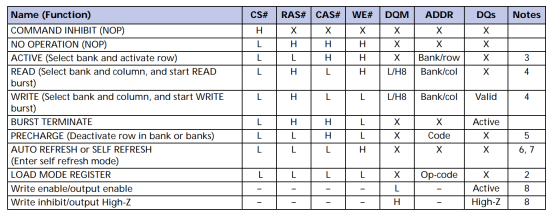
在寫入數據時,有時會出現不想對某8bit進行寫入,就可以采用DQM進行控制。
SDR SDRAM的內部機構為:
由于SDR SDRAM為DRAM,內部的存儲都是靠電容進行保存數據,電容的保持數據的時間為64ms,SDR SDRAM每次只能夠刷新一行,為了不丟失任何數據,所以要保證64ms內,將所有的行都要刷新一遍。
SDR SDRAM支持讀寫的長度為1、2、4、8和一行(整頁)。
具體的SDR SDRAM的介紹可以查看手冊。下面只介紹幾個相對重要的時序圖。
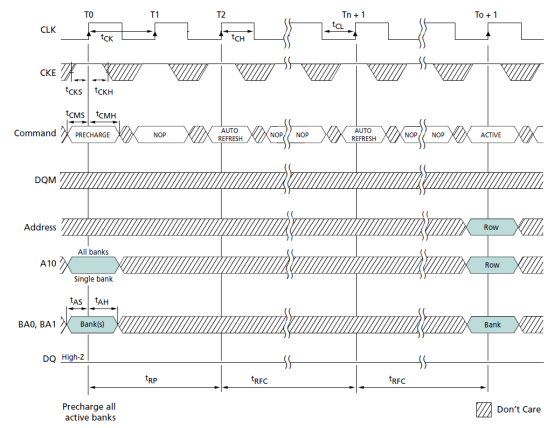
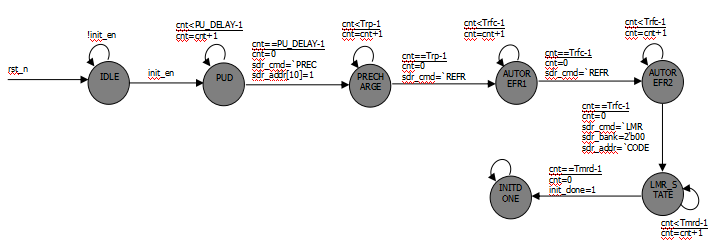
在SDR SDRAM正常使用之前,需要進行初始化。初始化的時序圖如下:
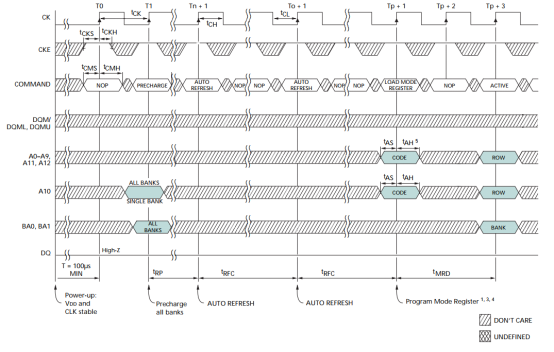
在PRECHARGE時,A10為高,表示選中所有的bank;A10為低,表示選中BA0、BA1所指定的bank。初始化中,A10置高。
在LOAD MOOE REGISTER中,采用地址線進行配置模式寄存器。說明如下:
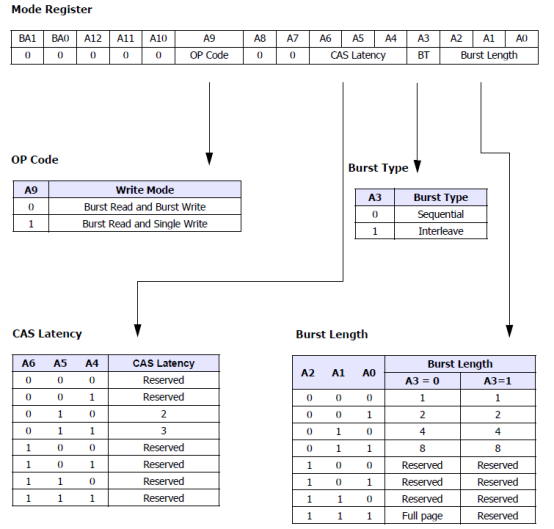
在模式配置中,利用CL(CAS Latency)表示列選通潛伏期,利用BL(Burst Length)表示突發長度。
SDR SDRAM中有內部的刷新控制器和刷新的行計數器,外部控制器只需要保證在64ms之內進行8192次刷新即可。
在進行PRECHARGE時,A10要為高電平。
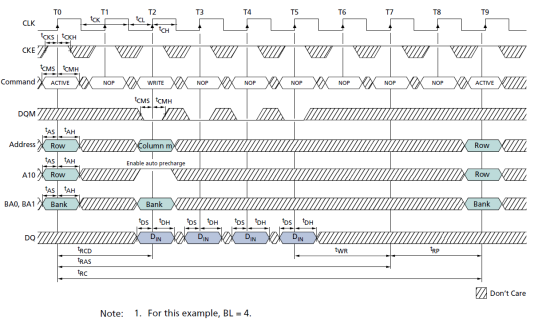
SDR SDRAM中,我們可以在任意位置進行寫入。寫入的時序圖如下:
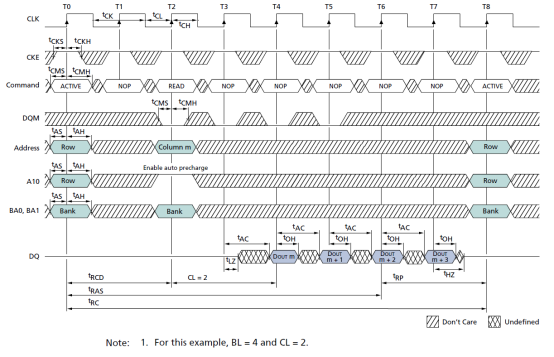
SDR SDRAM中,我們可以在任意位置進行讀出。讀出的時序圖如下:
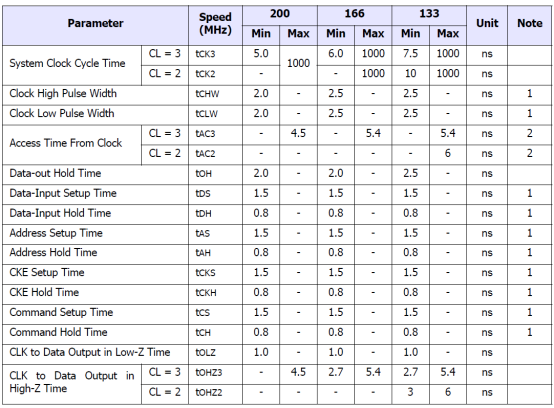
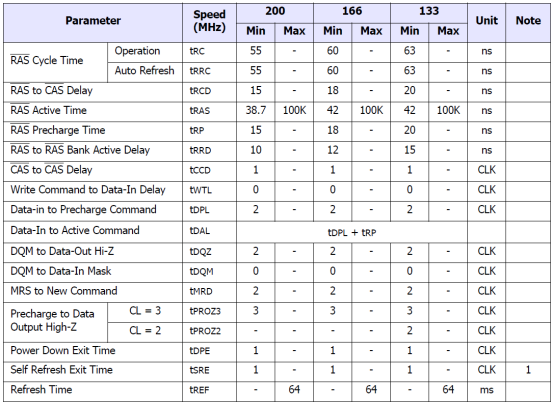
在各個時序中的時序參數如下:
設計要求
設計一個突發長度為2,列選通潛伏期為2的SDR SDRAM的控制器。
設計分析
該控制器共有四部分功能,初始化、刷新、寫和讀。四部分的執行控制采用一個模塊來控制。
SDR SDRAM必須要進行初始化,初始化只用執行一次。然后啟動一個計時器,等計時器達到后,進行刷新。在刷新的間隔中,根據讀寫的要求進行讀寫。
四個模塊都會對SDR SDRAM的命令線和地址線進行控制,所以輸出時,采用多路選擇器對齊進行選擇輸出。
四個模塊按照對應的時序圖進行編寫代碼即可。
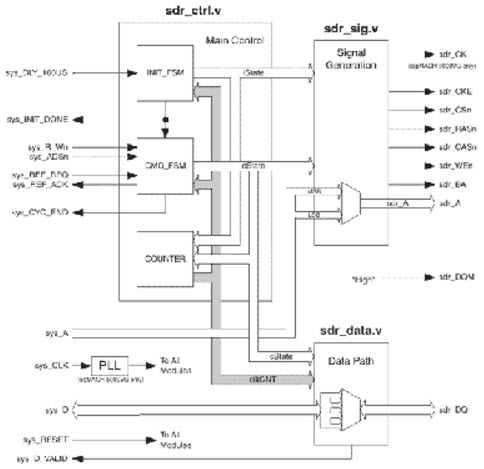
架構設計和信號說明
該控制器命名為sdr_drive。
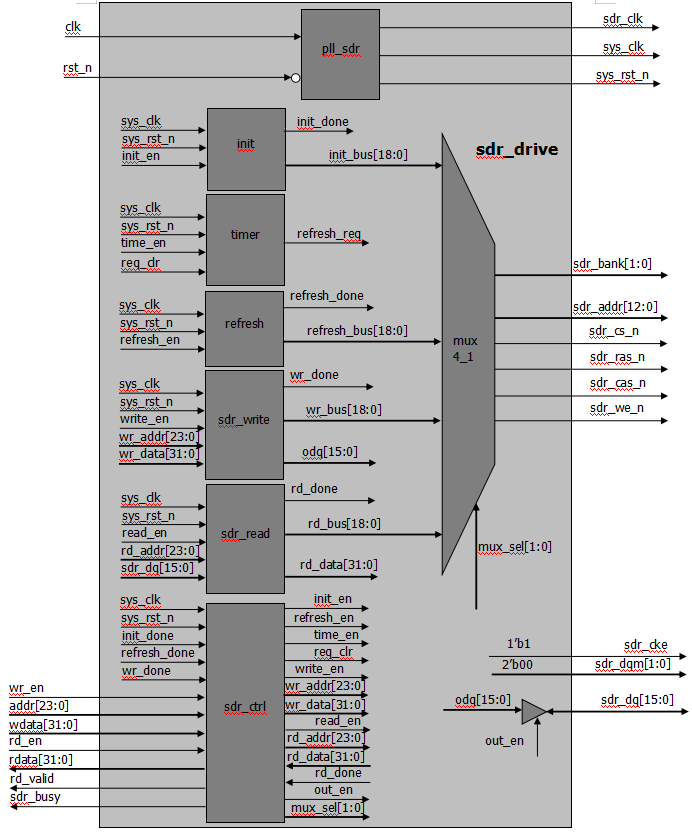
pll_sdr(鎖相環模塊):產生驅動所需要的100MHz的時鐘(0度相位)、SDR SDRAM所需要的100MHz的時鐘(270度相位)、以及PLL鎖定信號當作系統復位使用。
timer(刷新計時器):當啟動計時器后,開始計時,當計時到規定時間后,輸出刷新請求,計數器直接清零計數計數。當控制器響應后,輸出清除信號后,刷新請求拉低。
refresh(刷新模塊)、init(初始化模塊)、sdr_write(寫模塊)、sdr_read(讀模塊):當啟動模塊后,按照規定的時序進行輸出即可,然后輸出完成信號。
sdr_ctrl(控制模塊):控制各個模塊協調工作。
mux4_1(四選一多路選擇器模塊):選擇對應的bus總線作為輸出。
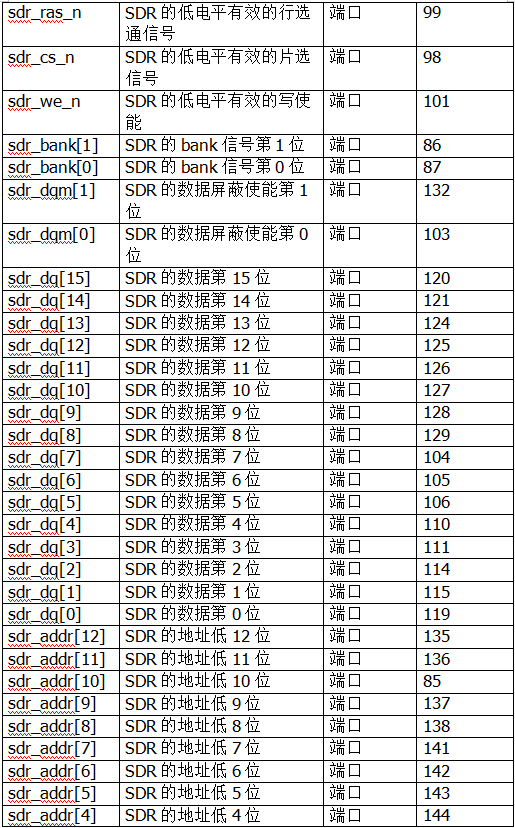
*_bus的組成為:高四位為sdr_cs_n、sdr_ras_n、sdr_cas_n、sdr_we_n。然后是bank的兩位,后續為13位的sdr_addr。

sdr_drive_head聲明
將驅動中用到各種參數定義在該文件中。
`defineSDR_ADDR_WIDTH13 `define SDR_COL_ADDR_WIDTH 9 `define SDR_REFRESH_TIME 64_000_000 `define ADDR_WIDTH 2 + `SDR_ADDR_WIDTH + `SDR_COL_ADDR_WIDTH `define BUS_WIDTH 4 + 2 + `SDR_ADDR_WIDTH `define CMD_INH 4'b1000 `define NOP 4'b0111 `define ACT 4'b0011 `define RD 4'b0101 `define WR 4'b0100 `define BT 4'b0110 `define PREC 4'b0010 `define REFR 4'b0001 `define LMR 4'b0000 `define PU_DELAY 20_000 `define Trp 3 `define Trfc 7 `define Tmrd 3 `define Trcd 3 `define Twr 3 `define Tcl 2 `define CODE 13'b000_0_00_010_0_001 `define REFRESH_TIME (`SDR_REFRESH_TIME/(2**`SDR_ADDR_WIDTH))/10
pll_sdr設計實現
該模塊為IP core,輸出0相位的100MHz(系統時鐘)和270相位的100MHz(SDR的時鐘)。系統設計中,信號在上升沿輸出;對于外部器件(相位調整為270),能夠較好的滿足建立和保持時間。
init設計實現
該模塊負責將SDR SDRAM進行初始化。上電延遲(PU_DELAY)設置為200us;預充電時間(Trp)設置為3個時鐘周期(30ns);自刷新時間(Trfc)設置為7個時鐘周期(70ns);模式寄存器應用時間(Tmrd)設置為3個時鐘周期(30ns);突發長度為2;列選通潛伏期為3。
按照對應的初始化的時序圖,做出如下設計。
本模塊采用狀態機的方式設計實現。
設計代碼為:
`include "../rtl/sdr_drive_head.v"
module init (
input wire clk,
input wire rst_n,
input wire init_en,
output reg init_done,
output wire [`BUS_WIDTH - 1 : 0] init_bus
);
localparam IDLE = 7'b000_0001;
localparam PUD = 7'b000_0010;
localparam PRECHARGE = 7'b000_0100;
localparam AUTOREFR1 = 7'b000_1000;
localparam AUTOREFR2 = 7'b001_0000;
localparam LMR_STATE = 7'b010_0000;
localparam INITDONE = 7'b100_0000;
reg [6:0] c_state;
reg [6:0] n_state;
wire [1:0] sdr_bank;
reg [3:0] sdr_cmd;
reg [`SDR_ADDR_WIDTH - 1 : 0] sdr_addr;
reg [14:0] cnt;
assign sdr_bank = 2'b00;
assign init_bus = {sdr_cmd,sdr_bank,sdr_addr};
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
c_state <= IDLE;
else
c_state <= n_state;
end
always @ * begin
case (c_state)
IDLE : begin
if (init_en == 1'b1)
n_state = PUD;
else
n_state = IDLE;
end
PUD : begin
if (cnt == `PU_DELAY - 1'b1)
n_state = PRECHARGE;
else
n_state = PUD;
end
PRECHARGE : begin
if (cnt == `Trp - 1'b1)
n_state = AUTOREFR1;
else
n_state = PRECHARGE;
end
AUTOREFR1 : begin
if (cnt == `Trfc - 1'b1)
n_state = AUTOREFR2;
else
n_state = AUTOREFR1;
end
AUTOREFR2 : begin
if (cnt == `Trfc - 1'b1)
n_state = LMR_STATE;
else
n_state = AUTOREFR2;
end
LMR_STATE : begin
if (cnt == `Tmrd - 1'b1)
n_state = INITDONE;
else
n_state = LMR_STATE;
end
INITDONE : begin
n_state = INITDONE;
end
default : n_state = IDLE;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_cmd <= `NOP;
else
case (c_state)
IDLE : sdr_cmd <= `NOP;
PUD : begin
if (cnt == `PU_DELAY - 1'b1)
sdr_cmd <= `PREC;
else
sdr_cmd <= `NOP;
end
PRECHARGE : begin
if (cnt == `Trp - 1'b1)
sdr_cmd <= `REFR;
else
sdr_cmd <= `NOP;
end
AUTOREFR1 : begin
if (cnt == `Trfc - 1'b1)
sdr_cmd <= `REFR;
else
sdr_cmd <= `NOP;
end
AUTOREFR2 : begin
if (cnt == `Trfc - 1'b1)
sdr_cmd <= `LMR;
else
sdr_cmd <= `NOP;
end
LMR_STATE : sdr_cmd <= `NOP;
INITDONE : sdr_cmd <= `NOP;
default : sdr_cmd <= `NOP;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
cnt <= 15'd0;
else
case (c_state)
IDLE : cnt <= 16'd0;
PUD : begin
if (cnt < `PU_DELAY - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 16'd0;
end
PRECHARGE : begin
if (cnt < `Trp - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 16'd0;
end
AUTOREFR1 : begin
if (cnt < `Trfc - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 16'd0;
end
AUTOREFR2 : begin
if (cnt < `Trfc - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 16'd0;
end
LMR_STATE : begin
if (cnt < `Tmrd - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 16'd0;
end
INITDONE : cnt <= 16'd0;
default : cnt <= 16'd0;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
init_done <= 1'b0;
else
if (c_state == LMR_STATE && cnt == `Tmrd - 1'b1)
init_done <= 1'b1;
else
init_done <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_addr <= 0;
else
if (c_state == PUD && cnt == `PU_DELAY - 1'b1)
sdr_addr[10] <= 1'b1;
else
if (c_state == AUTOREFR2 && cnt == `Trfc - 1'b1)
sdr_addr <= `CODE;
else
sdr_addr <= 0;
end
endmodule
timer設計實現
SDR SDRAM內部構造為DRAM,需要不間斷的刷新,要求64ms刷新一遍。每次刷新為一行,開發板上的SDR SDRAM共有8192行,平均需要7812.5ns刷新一次,我們選擇7810刷新一次。
到達規定的刷新時間時,控制器有可能正在進行其他的操作。在設計時,達到時間后,發出刷新請求,當外部執行刷新后,將次請求清除。發出刷新請求的同時,計數器重新歸零計數。
`include "../rtl/sdr_drive_head.v"
module timer (
input wire clk,
input wire rst_n,
input wire time_en,
input wire req_clr,
output reg refresh_req
);
reg [9:0] cnt;
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
cnt <= 10'd0;
else
if (time_en == 1'b1 && cnt < `REFRESH_TIME - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 10'd0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
refresh_req <= 1'b0;
else
if (cnt == `REFRESH_TIME - 1'b1)
refresh_req <= 1'b1;
else
if (req_clr == 1'b1)
refresh_req <= 1'b0;
else
refresh_req <= refresh_req;
end
endmodule
refresh設計實現
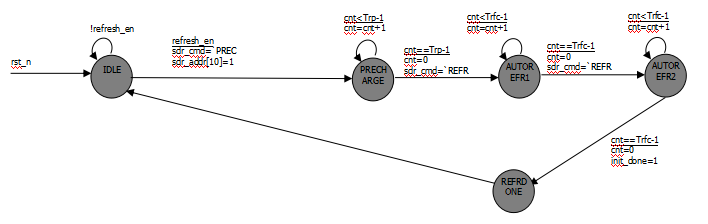
該模塊負責刷新,按照對應的時序圖進行控制即可。
該模塊利用狀態機的方式實現。狀態轉移圖如下:
設計代碼為:
`include "../rtl/sdr_drive_head.v"
module refresh (
input wire clk,
input wire rst_n,
input wire refresh_en,
output reg refresh_done,
output wire [`BUS_WIDTH - 1 : 0] refresh_bus
);
localparam IDLE = 5'b0_0001;
localparam PRECHARGE = 5'b0_0010;
localparam AUTOREFR1 = 5'b0_0100;
localparam AUTOREFR2 = 5'b0_1000;
localparam REFRDONE = 5'b1_0000;
reg [4:0] c_state;
reg [4:0] n_state;
wire [1:0] sdr_bank;
reg [3:0] sdr_cmd;
reg [`SDR_ADDR_WIDTH - 1 : 0] sdr_addr;
reg [3:0] cnt;
assign sdr_bank = 2'b00;
assign refresh_bus = {sdr_cmd,sdr_bank,sdr_addr};
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
c_state <= IDLE;
else
c_state <= n_state;
end
always @ * begin
case (c_state)
IDLE : begin
if (refresh_en == 1'b1)
n_state = PRECHARGE;
else
n_state = IDLE;
end
PRECHARGE : begin
if (cnt == `Trp - 1'b1)
n_state = AUTOREFR1;
else
n_state = PRECHARGE;
end
AUTOREFR1 : begin
if (cnt == `Trfc - 1'b1)
n_state = AUTOREFR2;
else
n_state = AUTOREFR1;
end
AUTOREFR2 : begin
if (cnt == `Trfc - 1'b1)
n_state = REFRDONE;
else
n_state = AUTOREFR2;
end
REFRDONE : begin
n_state = IDLE;
end
default : n_state = IDLE;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_cmd <= `NOP;
else
case (c_state)
IDLE : begin
if (refresh_en == 1'b1)
sdr_cmd <= `PREC;
else
sdr_cmd <= `NOP;
end
PRECHARGE : begin
if (cnt == `Trp - 1'b1)
sdr_cmd <= `REFR;
else
sdr_cmd <= `NOP;
end
AUTOREFR1 : begin
if (cnt == `Trfc - 1'b1)
sdr_cmd <= `REFR;
else
sdr_cmd <= `NOP;
end
AUTOREFR2 : sdr_cmd <= `NOP;
REFRDONE : sdr_cmd <= `NOP;
default : sdr_cmd <= `NOP;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
cnt <= 4'd0;
else
case (c_state)
IDLE : cnt <= 4'd0;
PRECHARGE : begin
if (cnt < `Trp - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 4'd0;
end
AUTOREFR1 : begin
if (cnt < `Trfc - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 4'd0;
end
AUTOREFR2 : begin
if (cnt < `Trfc - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 4'd0;
end
REFRDONE : cnt <= 4'd0;
default : cnt <= 4'd0;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
refresh_done <= 1'b0;
else
if (c_state == AUTOREFR2 && cnt == `Trfc - 1'b1)
refresh_done <= 1'b1;
else
refresh_done <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_addr <= 0;
else
if (c_state == IDLE && refresh_en == 1'b1)
sdr_addr[10] <= 1'b1;
else
sdr_addr <= 0;
end
endmodule
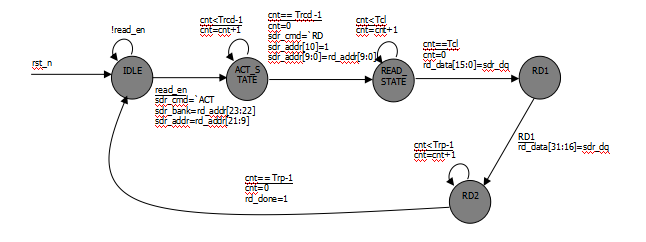
sdr_write設計實現
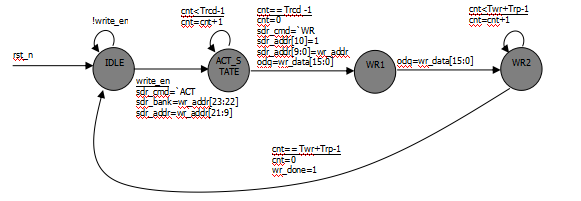
該模塊負責將外部的數據寫入到規定的地址中去。在SDR SDRAM中,每操作(讀寫)一次,都會引起該存儲位的漏電,每次結束時,可以進行預充電。SDR SDRAM提供了自動預充電的機制,在讀寫命令時,sdr_addr[10]=1,即可自動預充電。在設計時,應該要為自動預充電預留出足夠的時間。
根據對應的寫入時序圖,利用狀態機完成此設計。
設計代碼如下:
`include "../rtl/sdr_drive_head.v"
module sdr_write (
input wire clk,
input wire rst_n,
input wire write_en,
input wire [`ADDR_WIDTH - 1 : 0] wr_addr,
input wire [31:0] wr_data,
output reg [15:0] odq,
output wire [`BUS_WIDTH - 1 : 0] wr_bus,
output reg wr_done
);
localparam IDLE = 4'b0001;
localparam ACT_STATE = 4'b0010;
localparam WR1 = 4'b0100;
localparam WR2 = 4'b1000;
reg [3:0] c_state;
reg [3:0] n_state;
wire [1:0] sdr_bank;
reg [3:0] sdr_cmd;
reg [`SDR_ADDR_WIDTH - 1 : 0] sdr_addr;
reg [14:0] cnt;
assign sdr_bank = wr_addr[23:22];
assign wr_bus = {sdr_cmd,sdr_bank,sdr_addr};
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
c_state <= IDLE;
else
c_state <= n_state;
end
always @ * begin
case (c_state)
IDLE : begin
if (write_en == 1'b1)
n_state = ACT_STATE;
else
n_state = IDLE;
end
ACT_STATE : begin
if (cnt == `Trcd - 1'b1)
n_state = WR1;
else
n_state = ACT_STATE;
end
WR1 : n_state = WR2;
WR2 : begin
if (cnt == `Twr + `Trp - 1'b1)
n_state = IDLE;
else
n_state = WR2;
end
default : n_state = IDLE;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_cmd <= `NOP;
else
if (c_state == IDLE && write_en == 1'b1)
sdr_cmd <= `ACT;
else
if (c_state == ACT_STATE && cnt == `Trcd - 1'b1)
sdr_cmd <= `WR;
else
sdr_cmd <= `NOP;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_addr <= 0;
else
if (c_state == IDLE && write_en == 1'b1)
sdr_addr <= wr_addr[21:9];
else
if (c_state == ACT_STATE && cnt == `Trcd - 1'b1) begin
sdr_addr[10] <= 1'b1;
sdr_addr[8:0] <= wr_addr[8:0];
end
else
sdr_addr <= 0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
cnt <= 4'd0;
else
if (c_state == ACT_STATE && cnt < `Trcd - 1'b1)
cnt <= cnt + 1'b1;
else
if (c_state == WR2 && cnt < `Twr + `Trp - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 4'd0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
odq <= 16'd0;
else
if (c_state == ACT_STATE && cnt == `Trcd - 1'b1)
odq <= wr_data[15:0];
else
if (c_state == WR1)
odq <= wr_data[31:16];
else
odq <= 16'd0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
wr_done <= 1'b0;
else
if (c_state == WR2 && cnt < `Twr + `Trp - 1'b1)
wr_done <= 1'b1;
else
wr_done <= 1'b0;
end
endmodule
sdr_read設計實現
該模塊負責從指定的地址中,將數據讀出。
按照對應的讀時序圖即可實現功能,本模塊采用狀態機方式實現,狀態轉移圖如下:
設計代碼為:
module sdr_read (
input wire clk,
input wire rst_n,
input wire read_en,
input wire [`ADDR_WIDTH - 1 : 0] rd_addr,
input wire [15:0] sdr_dq,
output reg [31:0] rd_data,
output reg rd_done,
output wire [`BUS_WIDTH - 1 : 0] rd_bus
);
localparam IDLE = 5'b00001;
localparam ACT_STATE = 5'b00010;
localparam READ_STATE = 5'b00100;
localparam RD1 = 5'b01000;
localparam RD2 = 5'b10000;
reg [4:0] c_state;
reg [4:0] n_state;
wire [1:0] sdr_bank;
reg [3:0] sdr_cmd;
reg [`SDR_ADDR_WIDTH - 1 : 0] sdr_addr;
reg [3:0] cnt;
assign sdr_bank = rd_addr[23:22];
assign rd_bus = {sdr_cmd,sdr_bank,sdr_addr};
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
c_state <= IDLE;
else
c_state <= n_state;
end
always @ * begin
case (c_state)
IDLE : begin
if (read_en == 1'b1)
n_state = ACT_STATE;
else
n_state = IDLE;
end
ACT_STATE : begin
if (cnt == `Trcd - 1'b1)
n_state = READ_STATE;
else
n_state = ACT_STATE;
end
READ_STATE : begin
if (cnt == `Tcl)
n_state = RD1;
else
n_state = READ_STATE;
end
RD1 : n_state = RD2;
RD2 : begin
if (cnt == `Trp - 1'b1)
n_state = IDLE;
else
n_state = RD2;
end
default : n_state = IDLE;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_cmd <= `NOP;
else
if (c_state == IDLE && read_en == 1'b1)
sdr_cmd <= `ACT;
else
if (c_state == ACT_STATE && cnt == `Trcd - 1'b1)
sdr_cmd <= `RD;
else
sdr_cmd <= `NOP;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
sdr_addr <= 0;
else
if (c_state == IDLE && read_en == 1'b1)
sdr_addr <= rd_addr[21:9];
else
if (c_state == ACT_STATE && cnt == `Trcd - 1'b1) begin
sdr_addr[10] <= 1'b1;
sdr_addr[8:0] <= rd_addr[8:0];
end
else
sdr_addr <= 0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
cnt <= 4'd0;
else
case (c_state)
IDLE : cnt <= 4'd0;
ACT_STATE : begin
if (cnt < `Trcd - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 4'd0;
end
READ_STATE: begin
if (cnt < `Tcl)
cnt <= cnt + 1'b1;
else
cnt <= 4'd0;
end
RD1 : cnt <= 4'd0;
RD2 : begin
if (cnt < `Trp - 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= 4'd0;
end
default : cnt <= 4'd0;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rd_data <= 32'd0;
else
if (c_state == READ_STATE && cnt == `Tcl)
rd_data[15:0] <= sdr_dq;
else
if (c_state == RD1)
rd_data[31:16] <= sdr_dq;
else
rd_data <= rd_data;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rd_done <= 1'b0;
else
if (c_state == RD2 && cnt < `Trp - 1'b1)
rd_done <= 1'b1;
else
rd_done <= 1'b0;
end
endmodule
mux4_1設計實現
該模塊負責選擇出對應的bus,然后將對應位作為輸出即可。
設計代碼為:
module mux4_1 (
input wire [`BUS_WIDTH - 1 : 0] init_bus,
input wire [`BUS_WIDTH - 1 : 0] refresh_bus,
input wire [`BUS_WIDTH - 1 : 0] wr_bus,
input wire [`BUS_WIDTH - 1 : 0] rd_bus,
input wire [1:0] mux_sel,
output wire [1 : 0] sdr_bank,
output wire [`ADDR_WIDTH - 1 : 0] sdr_addr,
output wire sdr_cs_n,
output wire sdr_ras_n,
output wire sdr_cas_n,
output wire sdr_we_n
);
reg [`BUS_WIDTH - 1 : 0] sdr_bus;
assign sdr_cs_n = sdr_bus[18];
assign sdr_ras_n = sdr_bus[17];
assign sdr_cas_n = sdr_bus[16];
assign sdr_we_n = sdr_bus[15];
assign sdr_bank = sdr_bus[14:13];
assign sdr_addr = sdr_bus[12:0];
always @ * begin
case (mux_sel)
2'b00 : sdr_bus = init_bus;
2'b01 : sdr_bus = refresh_bus;
2'b10 : sdr_bus = wr_bus;
2'b11 : sdr_bus = rd_bus;
default : sdr_bus = init_bus;
endcase
end
endmodule
sdr_ctrl設計實現
該模塊負責調度整個控制器,利用狀態機實現。
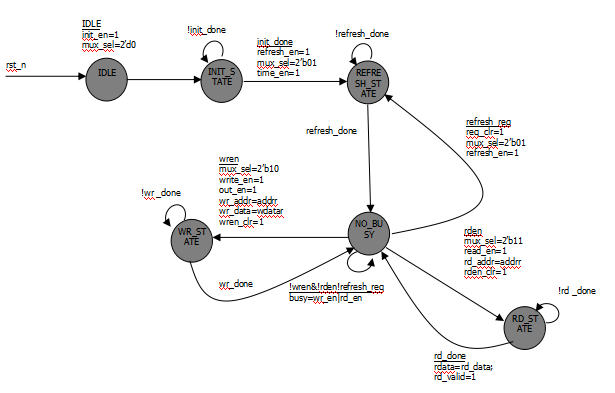
設計代碼為:
`include "../rtl/sdr_drive_head.v"
module sdr_ctrl (
input wire clk,
input wire rst_n,
input wire wr_en,
input wire rd_en,
input wire [`ADDR_WIDTH - 1 : 0] addr,
input wire [31:0] wdata,
output reg [31:0] rdata,
output reg rd_valid,
output wire sdr_busy,
output reg [1:0] mux_sel,
output reg init_en,
input wire init_done,
output reg time_en,
input wire refresh_req,
output reg req_clr,
output reg refresh_en,
input wire refresh_done,
output reg out_en,
output reg write_en,
output reg [`ADDR_WIDTH - 1 : 0] wr_addr,
output reg [31:0] wr_data,
input wire wr_done,
output reg read_en,
output reg [`ADDR_WIDTH - 1 : 0] rd_addr,
input wire [31:0] rd_data,
input wire rd_done
);
localparam IDLE = 6'b000_001;
localparam INIT_STATE = 6'b000_010;
localparam REFRESH_STATE = 6'b000_100;
localparam NO_BUSY = 6'b001_000;
localparam WR_STATE = 6'b010_000;
localparam RD_STATE = 6'b100_000;
reg [5:0] c_state;
reg [5:0] n_state;
reg wren;
reg wren_clr;
reg rden;
reg rden_clr;
reg [`ADDR_WIDTH - 1 : 0] addrr;
reg [31:0] wdatar;
reg busy;
assign sdr_busy = busy | rd_en | wr_en;
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
wren <= 1'b0;
else
if (wr_en == 1'b1)
wren <= 1'b1;
else
if (wren_clr == 1'b1)
wren <= 1'b0;
else
wren <= wren;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rden <= 1'b0;
else
if (rd_en == 1'b1)
rden <= 1'b1;
else
if (rden_clr == 1'b1)
rden <= 1'b0;
else
rden <= rden;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
wdatar <= 32'd0;
else
if (wr_en == 1'b1)
wdatar <= wdata;
else
wdatar <= wdatar;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
addrr <= 0;
else
if (wr_en == 1'b1 || rd_en == 1'b1)
addrr <= addr;
else
addrr <= addrr;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
c_state <= IDLE;
else
c_state <= n_state;
end
always @ * begin
case (c_state)
IDLE : n_state = INIT_STATE;
INIT_STATE : begin
if (init_done == 1'b1)
n_state = REFRESH_STATE;
else
n_state = INIT_STATE;
end
REFRESH_STATE : begin
if (refresh_done == 1'b1)
n_state = NO_BUSY;
else
n_state = REFRESH_STATE;
end
NO_BUSY : begin
if (refresh_req == 1'b1)
n_state = REFRESH_STATE;
else
if (wren == 1'b1)
n_state = WR_STATE;
else
if (rden == 1'b1)
n_state = RD_STATE;
else
n_state = NO_BUSY;
end
WR_STATE : begin
if (wr_done == 1'b1)
n_state = NO_BUSY;
else
n_state = WR_STATE;
end
RD_STATE : begin
if (rd_done == 1'b1)
n_state = NO_BUSY;
else
n_state = RD_STATE;
end
default : n_state = IDLE;
endcase
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
busy <= 1'b1;
else
if (c_state == NO_BUSY && wren == 1'b0 && rden == 1'b0 && refresh_req == 1'b0)
busy <= rd_en | wr_en;
else
busy <= 1'b1;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
init_en <= 1'b0;
else
if (c_state == IDLE)
init_en <= 1'b1;
else
init_en <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
time_en <= 1'b0;
else
if (c_state == INIT_STATE && init_done == 1'b1)
time_en <= 1'b1;
else
time_en <= time_en;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
refresh_en <= 1'b0;
else
if (c_state == INIT_STATE && init_done == 1'b1)
refresh_en <= 1'b1;
else
if (c_state == NO_BUSY && refresh_req == 1'b1)
refresh_en <= 1'b1;
else
refresh_en <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
req_clr <= 1'b0;
else
if (c_state == NO_BUSY && refresh_req == 1'b1)
req_clr <= 1'b1;
else
req_clr <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
write_en <= 1'b0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b1)
write_en <= 1'b1;
else
write_en <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
out_en <= 1'b0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b1)
out_en <= 1'b1;
else
if (c_state == WR_STATE && wr_done == 1'b1)
out_en <= 1'b0;
else
out_en <= out_en;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
wr_addr <= 0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b1)
wr_addr <= addrr;
else
wr_addr <= wr_addr;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
wr_data <= 0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b1)
wr_data <= wdatar;
else
wr_data <= wr_data;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
wren_clr <= 1'b0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b1)
wren_clr <= 1'b1;
else
wren_clr <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rden_clr <= 1'b0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b0 && rden == 1'b1)
rden_clr <= 1'b1;
else
rden_clr <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
read_en <= 1'b0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b0 && rden == 1'b1)
read_en <= 1'b1;
else
read_en <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rd_addr <= 0;
else
if (c_state == NO_BUSY && refresh_req == 1'b0 && wren == 1'b0 && rden == 1'b1)
rd_addr <= addrr;
else
rd_addr <= rd_addr;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rdata <= 32'd0;
else
if (c_state == RD_STATE && rd_done == 1'b1)
rdata <= rd_data;
else
rdata <= rdata;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rd_valid <= 1'b0;
else
if (c_state == RD_STATE && rd_done == 1'b1)
rd_valid <= 1'b1;
else
rd_valid <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
mux_sel <= 2'b00;
else
case (c_state)
IDLE : mux_sel <= 2'b00;
INIT_STATE : begin
if (init_done == 1'b1)
mux_sel <= 2'b01;
else
mux_sel <= mux_sel;
end
REFRESH_STATE: mux_sel <= mux_sel;
NO_BUSY : begin
if (refresh_req == 1'b1)
mux_sel <= 2'b01;
else
if (wren == 1'b1)
mux_sel <= 2'b10;
else
if (rden == 1'b1)
mux_sel <= 2'b11;
else
mux_sel <= mux_sel;
end
RD_STATE : mux_sel <= mux_sel;
WR_STATE : mux_sel <= mux_sel;
default : mux_sel <= 2'b00;
endcase
end
endmodule
為了防止在進行刷新的起始部分丟失讀寫命令,所以在設計時,加入了緩存結構,只要有讀寫命令時,都會進行保存。在讀寫執行時,才會清除此命令。
RTL仿真
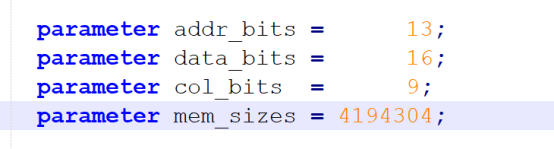
為了能夠仿真此設計,需要用到SDR SDRAM的仿真模型。仿真模型在msim的sdr_sim_module中,將其修改為行線為13bit,列為9bit,每個bank有4194304個存儲空間。
在仿真時,在第二個bank,第五行,第10列,寫入一個隨機值。然后讀取出來。
仿真代碼為:
`timescale 1ns/1ps
module sdr_drive_tb;
reg clk;
reg rst_n;
wire sys_clk;
wire sys_rst_n;
wire sdr_busy;
reg wr_en;
reg rd_en;
reg [23:0] addr;
reg [31:0] wdata;
wire [31:0] rdata;
wire rd_valid;
wire sdr_clk;
wire sdr_cke;
wire sdr_cs_n;
wire sdr_ras_n;
wire sdr_cas_n;
wire sdr_we_n;
wire [15:0] sdr_dq;
wire [1:0] sdr_bank;
wire [1:0] sdr_dqm;
wire [12:0] sdr_addr;
sdr_drive sdr_drive_inst(
.clk (clk),
.rst_n (rst_n),
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
// local
.sdr_busy (sdr_busy),
.wr_en (wr_en),
.rd_en (rd_en),
.addr (addr),
.wdata (wdata),
.rdata (rdata),
.rd_valid (rd_valid),
// sdr
.sdr_clk (sdr_clk),
.sdr_cke (sdr_cke),
.sdr_cs_n (sdr_cs_n),
.sdr_ras_n (sdr_ras_n),
.sdr_cas_n (sdr_cas_n),
.sdr_we_n (sdr_we_n),
.sdr_bank (sdr_bank),
.sdr_addr (sdr_addr),
.sdr_dqm (sdr_dqm),
.sdr_dq (sdr_dq)
);
mt48lc32m16a2 mt48lc32m16a2_inst(
.Dq (sdr_dq),
.Addr (sdr_addr),
.Ba (sdr_bank),
.Clk (sdr_clk),
.Cke (sdr_cke),
.Cs_n (sdr_cs_n),
.Ras_n (sdr_ras_n),
.Cas_n (sdr_cas_n),
.We_n (sdr_we_n),
.Dqm (sdr_dqm)
);
initial clk = 1'b0;
always # 10 clk = ~clk;
initial begin
rst_n = 1'b0;
wr_en = 1'b0;
rd_en = 1'b0;
addr = {2'b01, 13'd5,9'd10};
wdata = 32'd0;
# 201
rst_n = 1'b1;
@ (negedge sdr_busy);
@ (posedge sys_clk);
# 2;
wr_en = 1'b1;
wdata = $random;
@ (posedge sys_clk);
# 2;
wr_en = 1'b0;
# 2000;
@ (negedge sdr_busy);
@ (posedge sys_clk);
# 2;
rd_en = 1'b1;
@ (posedge sys_clk);
# 2;
rd_en = 1'b0;
# 2000;
$stop;
end
endmodule
這設置激勵時,將tb文件和仿真模型文件同時加入添加文件中。
在modelsim的報告界面會顯示出具體的配置信息以及讀寫信息。
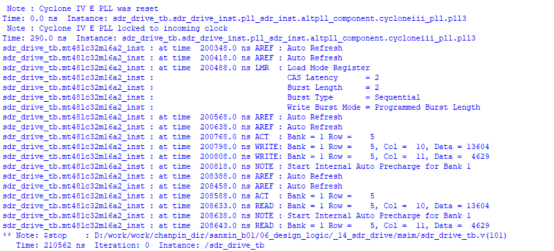
從打印的報告中可以看出,在初始化時,列選通潛伏期為2,突發長度為2。在后續的讀寫時,在指定的位置,寫入了13604,后續的一個位置為4629;在讀出時,也正確的讀出了數據。
報告打印出寫入數據,即認為寫入成功;報告打印出讀出數據,只能證明控制器將數據讀出,并不表示控制器能把數據接收到。
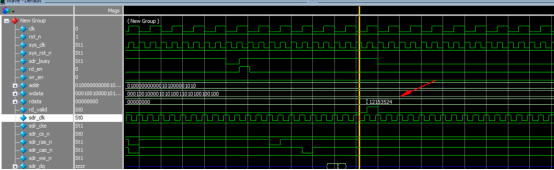
通過控制輸出的rdata以及對應的rd_valid信號,確定讀出成功。在rdata中顯示為16進制,16進制的1215為十進制的4629;16進制的3524的為十進制的13604。證明讀數據接收正確。
板級測試
編寫控制器的上游模塊(sdr_drive_test_crtl),控制寫入和讀出。在固定的地址中addr = {2'b01, 13'd128, 9'd20},寫入一個固定的數字wdata = 32'h5a5aa5a5,然后讀出,進行驗證。
讀者在進行驗證時,可以采樣其他的地址或者數據進行驗證,且可以進行多次嘗試,保證設計正確。
該模塊采用狀態機設計實現。

設計代碼為:
`include "../rtl/sdr_drive_head.v"
module sdr_drive_test_ctrl (
input wire clk,
input wire rst_n,
input wire sdr_busy,
output reg wr_en,
output reg rd_en,
output wire [31:0] wdata,
input wire rd_valid,
input wire [31:0] rdata,
output wire [`ADDR_WIDTH - 1 : 0] addr
);
localparam IDLE = 4'b0001;
localparam WR_STATE = 4'b0010;
localparam RD_STATE = 4'b0100;
localparam TEST_DONE = 4'b1000;
reg [3:0] c_state;
reg [3:0] n_state;
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
c_state <= IDLE;
else
c_state <= n_state;
end
always @ * begin
case (c_state)
IDLE : begin
if (sdr_busy == 1'b0)
n_state = WR_STATE;
else
n_state = IDLE;
end
WR_STATE : begin
if (sdr_busy == 1'b0)
n_state = RD_STATE;
else
n_state = WR_STATE;
end
RD_STATE : begin
if (rd_valid == 1'b1 && rdata == 32'h5a5aa5a5)
n_state = TEST_DONE;
else
n_state = RD_STATE;
end
TEST_DONE : n_state = TEST_DONE;
default : n_state = IDLE;
endcase
end
assign wdata = 32'h5a5aa5a5;
assign addr = {2'b01, 13'd128, 9'd20};
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
wr_en <= 1'b0;
else
if (c_state == IDLE && sdr_busy == 1'b0)
wr_en <= 1'b1;
else
wr_en <= 1'b0;
end
always @ (posedge clk, negedge rst_n) begin
if (rst_n == 1'b0)
rd_en <= 1'b0;
else
if (c_state == WR_STATE && sdr_busy == 1'b0)
rd_en <= 1'b1;
else
rd_en <= 1'b0;
end
endmodule
編寫測試頂層,模塊命名為sdr_drive_test,并且設置為頂層。
此模塊負責例化sdr_drive和sdr_drive_test_ctrl,完成連接功能,以此測試。
代碼為:
`include "../rtl/sdr_drive_head.v"
module sdr_drive_test (
input wire clk,
input wire rst_n,
// sdr
output wire sdr_clk,
output wire sdr_cke,
output wire sdr_cs_n,
output wire sdr_ras_n,
output wire sdr_cas_n,
output wire sdr_we_n,
output wire [1:0] sdr_bank,
output wire [`SDR_ADDR_WIDTH - 1 : 0] sdr_addr,
output wire [1:0] sdr_dqm,
inout wire [15:0] sdr_dq
);
wire sys_clk;
wire sys_rst_n;
// local
wire sdr_busy;
wire wr_en;
wire rd_en;
wire [`ADDR_WIDTH - 1 : 0] addr;
wire [31:0] wdata;
wire [31:0] rdata;
wire rd_valid;
sdr_drive_test_ctrl sdr_drive_test_ctrl_inst(
.clk (sys_clk),
.rst_n (sys_rst_n),
.sdr_busy (sdr_busy),
.wr_en (wr_en),
.rd_en (rd_en),
.wdata (wdata),
.rd_valid (rd_valid),
.rdata (rdata),
.addr (addr)
);
sdr_drive sdr_drive_inst(
.clk (clk),
.rst_n (rst_n),
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
// local
.sdr_busy (sdr_busy),
.wr_en (wr_en),
.rd_en (rd_en),
.addr (addr),
.wdata (wdata),
.rdata (rdata),
.rd_valid (rd_valid),
// sdr
.sdr_clk (sdr_clk),
.sdr_cke (sdr_cke),
.sdr_cs_n (sdr_cs_n),
.sdr_ras_n (sdr_ras_n),
.sdr_cas_n (sdr_cas_n),
.sdr_we_n (sdr_we_n),
.sdr_bank (sdr_bank),
.sdr_addr (sdr_addr),
.sdr_dqm (sdr_dqm),
.sdr_dq (sdr_dq)
);
endmodule
經過綜合分析后,進行分配管腳。在分配管腳后,需要將雙功能管腳中的NCEO設置為普通用戶IO。如果不設置,將會出現如下錯誤:

右擊器件名稱,選擇DEVICE。
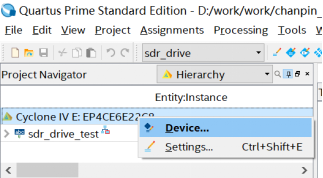
選擇device and pin option。
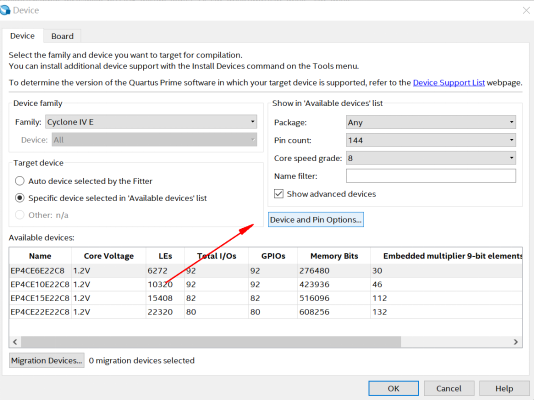
選擇dual – purpose pins。
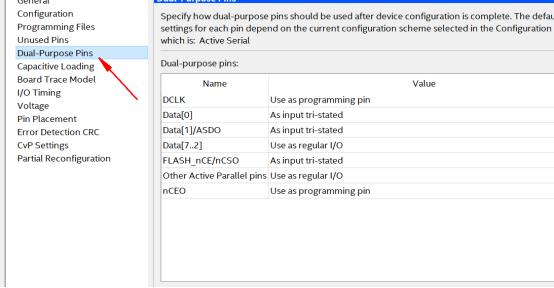
將nceo設置為 use as regular IO。
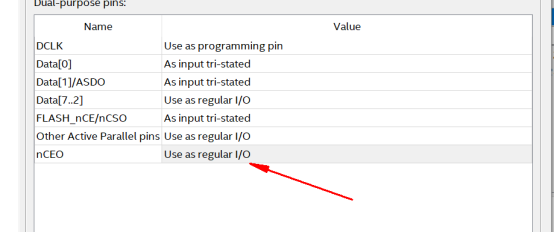
點擊OK,進行編譯即可。
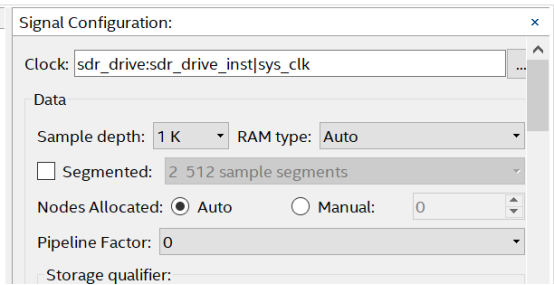
連接上開發板,啟動邏輯分析儀。
將采樣時鐘選擇為,sys_clk(PLL的c0)。采樣深度選擇為1K。
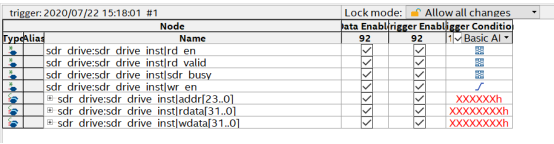
添加觀測信號如下,將wr_en的上升沿設置為觸發條件。
經過保存,重新形成配置文件后,進行下板測試。
下板后,按下復位。等待波形觸發。
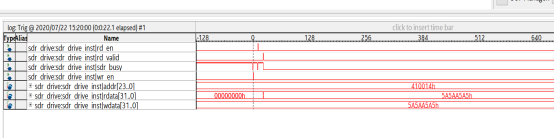
通過邏輯分析儀,就可以看出可以正確的寫入和讀出數據。
讀者也可以進行嘗試一次性寫入多個數據,然后進行讀出,進行驗證設計的正確性。
審核編輯:劉清
-
SDRAM
+關注
關注
7文章
437瀏覽量
55741 -
存儲器
+關注
關注
38文章
7579瀏覽量
165429 -
RAM
+關注
關注
8文章
1384瀏覽量
115900 -
SDR
+關注
關注
7文章
235瀏覽量
50778 -
邏輯分析儀
+關注
關注
3文章
216瀏覽量
23449
原文標題:FPGA零基礎學習精選 | SDR SDRAM 驅動設計
文章出處:【微信號:HXSLH1010101010,微信公眾號:FPGA技術江湖】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
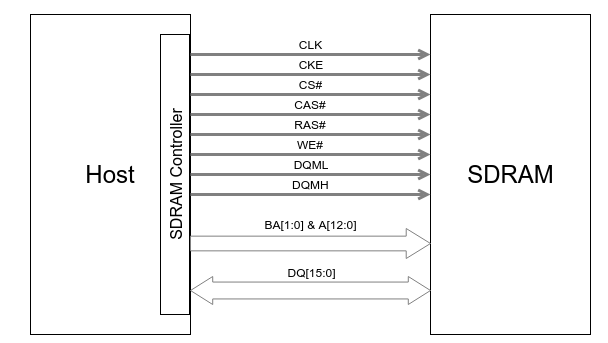
以SDR SDRAM 為例,DRAM Device 與 Host 端的接口描述
詳解:SDR/DDR/DDR2/SDRAM的功能及異同
Spartan 6是否支持SDR SDRAM?
講解SDRAM的驅動實現 精選資料分享
FPGA零基礎學習:SDR SDRAM 驅動設計
FPGA零基礎學習:SDR SDRAM驅動設計實用進階
AMBA DDR、LPDDR和SDR動態內存控制器DMC-40技術參考手冊
SDR SDRAM Controller
ref sdr sdram verilog代碼
SDR SDRAM Controller (White Pa
ref sdr sdram vhdl代碼
標準SDR SDRAM控制器參考設計,Lattice提供Vr
SDRAM的引腳封裝標準
基于SDR SDRAM ControllerSRAM存儲器的參考設計





 工商網監
工商網監

評論