") 為什么需要復(fù)位電路?漫談復(fù)位reset
為什么需要復(fù)位電路?漫談復(fù)位reset
前言:
最近看到群里面有些萌新在進(jìn)行討論數(shù)字電路中的復(fù)位邏輯,所以專門寫一篇討論復(fù)位的文章,希望能幫助大家理解復(fù)位。
引言:
在IC設(shè)計(jì)中,把復(fù)位和時(shí)鐘電路稱為最重要的兩個(gè)電路一點(diǎn)也不為過。前者復(fù)位電路把IC設(shè)計(jì)的電路引導(dǎo)到一個(gè)已知的狀態(tài),后者時(shí)鐘電路給IC設(shè)計(jì)的電路提供澎湃的心跳動(dòng)力。同時(shí),這兩者主要作用于電路中的時(shí)序元件。對(duì)于時(shí)序元件,不可避免地會(huì)有一些信號(hào)時(shí)間上額外的要求。
正文:
復(fù)位電路的作用:
(1)在仿真時(shí):使仿真的電路進(jìn)入規(guī)定的初始化狀態(tài)或者其他預(yù)知的狀態(tài),基于此狀態(tài)下,電路進(jìn)行狀態(tài)變換。如果仿真中時(shí)序元件沒有復(fù)位電路,從波形圖上只能看到時(shí)序單元周圍邏輯都是X標(biāo)紅的狀態(tài)。
(2)在IC設(shè)計(jì)中:復(fù)位信號(hào)可以讓設(shè)計(jì)的硬件電路進(jìn)入一個(gè)穩(wěn)定且狀態(tài)確定的狀態(tài),避免因?yàn)樯想姾箅娐愤M(jìn)入到隨機(jī)的狀態(tài)而硬件死機(jī)。如果用示波器捕捉內(nèi)部時(shí)序單元的信號(hào)狀態(tài),信號(hào)為高低電平之一,只是高低電平的信號(hào)可能不符合設(shè)計(jì)的預(yù)期。
PS:對(duì)于仿真時(shí)候的信號(hào)未知X狀態(tài)和IC設(shè)計(jì)中的高低電平。可以得出結(jié)論:在Verilog語法中,用仿真X狀態(tài)表示物理時(shí)序單元電路當(dāng)前狀態(tài)未知,信號(hào)可能為高或低電平。
PS:由上,是否電路中所有的單元都需要復(fù)位信號(hào)?
答:不是,首先組合邏輯電路是不需要復(fù)位信號(hào)的。其次不需要立刻進(jìn)入明確狀態(tài)的電路:數(shù)據(jù)流水線寄存器、數(shù)據(jù)移位寄存器等也不需要復(fù)位信號(hào)。
復(fù)位電路的分類:
對(duì)于電路中的時(shí)序元件,把復(fù)位信號(hào)受到時(shí)鐘的控制和復(fù)位信號(hào)不受時(shí)鐘的控制兩種電路分別稱為同步復(fù)位電路和異步復(fù)位電路。如下圖:
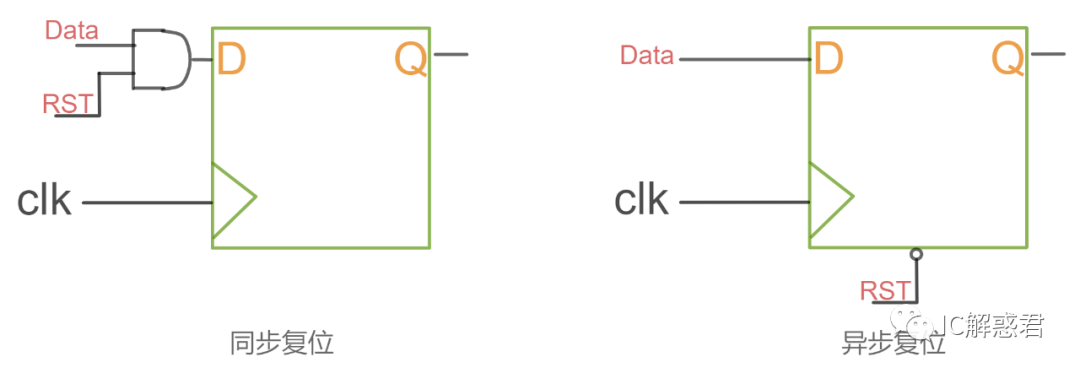
同步復(fù)位:
在同步復(fù)位的電路中,只有當(dāng)時(shí)鐘到來時(shí)才會(huì)把復(fù)位或者數(shù)據(jù)信息傳輸?shù)郊拇嫫鲀?nèi)部,影響寄存器內(nèi)部的狀態(tài)變換。如上圖所示,在同步復(fù)位電路中,復(fù)位信號(hào)本質(zhì)上其實(shí)就是一組數(shù)據(jù)信號(hào)。復(fù)位和數(shù)據(jù)信號(hào)都需要在時(shí)鐘的驅(qū)動(dòng)下進(jìn)行傳輸。所以此處的同步復(fù)位電路默認(rèn)就有了優(yōu)先級(jí)(時(shí)鐘>復(fù)位>數(shù)據(jù))。
同步復(fù)位的優(yōu)點(diǎn):
(1)在同步復(fù)位電路下,復(fù)位和數(shù)據(jù)信號(hào)都受到時(shí)鐘信號(hào)的控制,所以同步復(fù)位一般可以確保電路是一個(gè)同步電路(漫談IC亞穩(wěn)態(tài))。
(2)在ASIC設(shè)計(jì)中,同步電路一般可以綜合為更小的同步觸發(fā)器(因?yàn)橛|發(fā)器沒有包含復(fù)位邏輯),但是在FPGA設(shè)計(jì)中并不如此,一般FPGA的時(shí)序元件為帶異步復(fù)位的觸發(fā)器(也有同步觸發(fā)器,視廠家而定)。如果在FPGA設(shè)計(jì)中使用同步復(fù)位,其消耗的資源相對(duì)較多。
(3)由于觸發(fā)器的跳轉(zhuǎn)只在時(shí)鐘的邊沿,所以觸發(fā)器可以在一定程度上過濾電路毛刺。進(jìn)而如果復(fù)位由電路內(nèi)部的邏輯控制,在這種情況下可以在設(shè)計(jì)中使用同步復(fù)位:通過可以在一定程度上過濾電路毛刺的特性,過濾掉內(nèi)部電路邏輯產(chǎn)生的毛刺,使設(shè)計(jì)更魯棒。
同步復(fù)位的缺點(diǎn):
(1)同步復(fù)位需要較長的保持復(fù)位狀態(tài)時(shí)間(最小也要大于時(shí)鐘周期),保證同步復(fù)位信號(hào)可以到達(dá)每一個(gè)寄存器并且要在有效時(shí)鐘沿之前到達(dá)(在真正設(shè)計(jì)使用的時(shí)候還需要考慮時(shí)鐘偏斜、組合邏輯延時(shí)、復(fù)位延時(shí)等,即:同步復(fù)位信號(hào)時(shí)長> 時(shí)鐘周期 + 時(shí)鐘偏斜 + 組合邏輯延時(shí))。
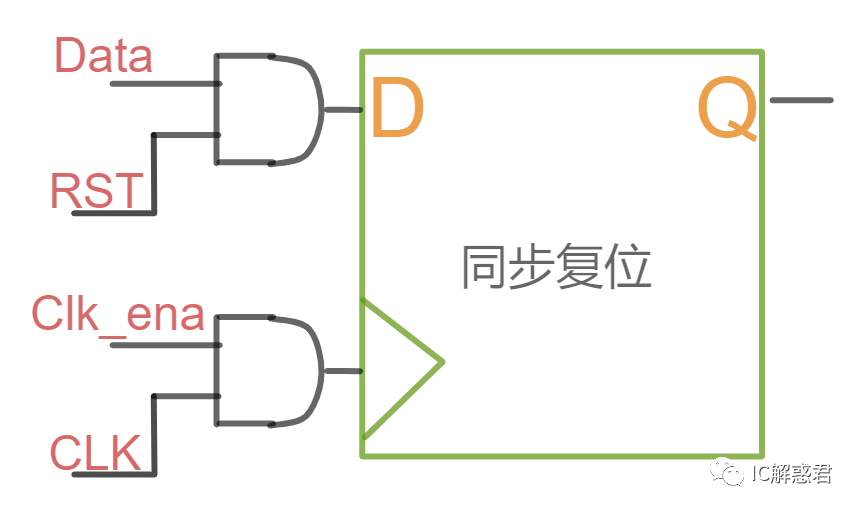
(2)在低功耗設(shè)計(jì)中,同步復(fù)位一般不能用于門控時(shí)鐘控制的電路。因?yàn)橥綇?fù)位電路中,主要靠時(shí)鐘驅(qū)動(dòng)復(fù)位和數(shù)據(jù)。當(dāng)復(fù)位發(fā)出時(shí),有可能時(shí)序電路此時(shí)并沒有時(shí)鐘驅(qū)動(dòng),那么此時(shí)的復(fù)位就不能完成。
異步復(fù)位:
擁有異步復(fù)位的寄存器在設(shè)計(jì)的時(shí)候就已經(jīng)多了一個(gè)復(fù)位引腳。通過觸發(fā)該引腳的狀態(tài)可以在任何時(shí)候進(jìn)行異步復(fù)位電路中寄存器。此時(shí)異步復(fù)位電路的默認(rèn)優(yōu)先級(jí)為:(復(fù)位>時(shí)鐘>數(shù)據(jù))(如上上圖)。
異步復(fù)位的優(yōu)點(diǎn):
(1)異步復(fù)位的復(fù)位邏輯和數(shù)據(jù)邏輯沒有任何關(guān)系,所以相比同步復(fù)位,能夠使數(shù)據(jù)路徑更好地收斂。(上上圖對(duì)比)
(2)不用在時(shí)鐘的控制下進(jìn)行復(fù)位,所以對(duì)于剛才所提到的低功耗設(shè)計(jì)中,可以達(dá)到無時(shí)鐘復(fù)位的效果[注意:寄存器復(fù)位后的正常狀態(tài)恢復(fù)需要時(shí)鐘參與]。
異步復(fù)位的缺點(diǎn):
(1)因?yàn)?strong>異步復(fù)位不受時(shí)鐘的控制,所以當(dāng)電路復(fù)位引腳有毛刺的時(shí)候,會(huì)引起電路的異常復(fù)位。
(2)在異步復(fù)位的時(shí)候,如果釋放復(fù)位信號(hào)在時(shí)鐘有效邊沿周圍。那么可能會(huì)引起時(shí)序單元的輸出出現(xiàn)亞穩(wěn)態(tài),導(dǎo)致電路亞穩(wěn)態(tài)傳播。如下圖:
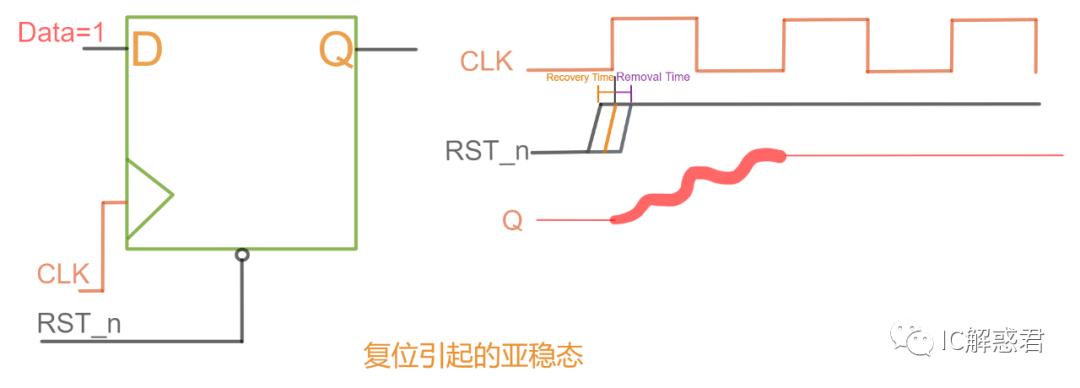
如圖所示:
復(fù)位信號(hào)在時(shí)鐘有效沿之前Recovery Time時(shí)間內(nèi)釋放可能會(huì)引起觸發(fā)器輸出亞穩(wěn)態(tài)。
復(fù)位信號(hào)在時(shí)鐘有效沿之后RemovalTime時(shí)間內(nèi)釋放也可能會(huì)引起觸發(fā)器輸出亞穩(wěn)態(tài)。
對(duì)比set up time&hold time和此處的Recovery time &Removaltime,可以發(fā)現(xiàn)對(duì)于觸發(fā)器來說,輸入信號(hào)(Data 和 RST_n)都需要對(duì)于時(shí)鐘信號(hào)沿保持穩(wěn)定的一個(gè)時(shí)間窗口,否則觸發(fā)器可能會(huì)導(dǎo)致亞穩(wěn)態(tài)的輸出。為了避免觸發(fā)器的亞穩(wěn)態(tài),就需要保證不要在觸發(fā)器的這幾個(gè)時(shí)間窗內(nèi)信號(hào)有變化。(漫談STA-setup/hold time)
結(jié)合同步復(fù)位和異步復(fù)位的優(yōu)點(diǎn)可以得到:
異步復(fù)位同步釋放電路:如下圖
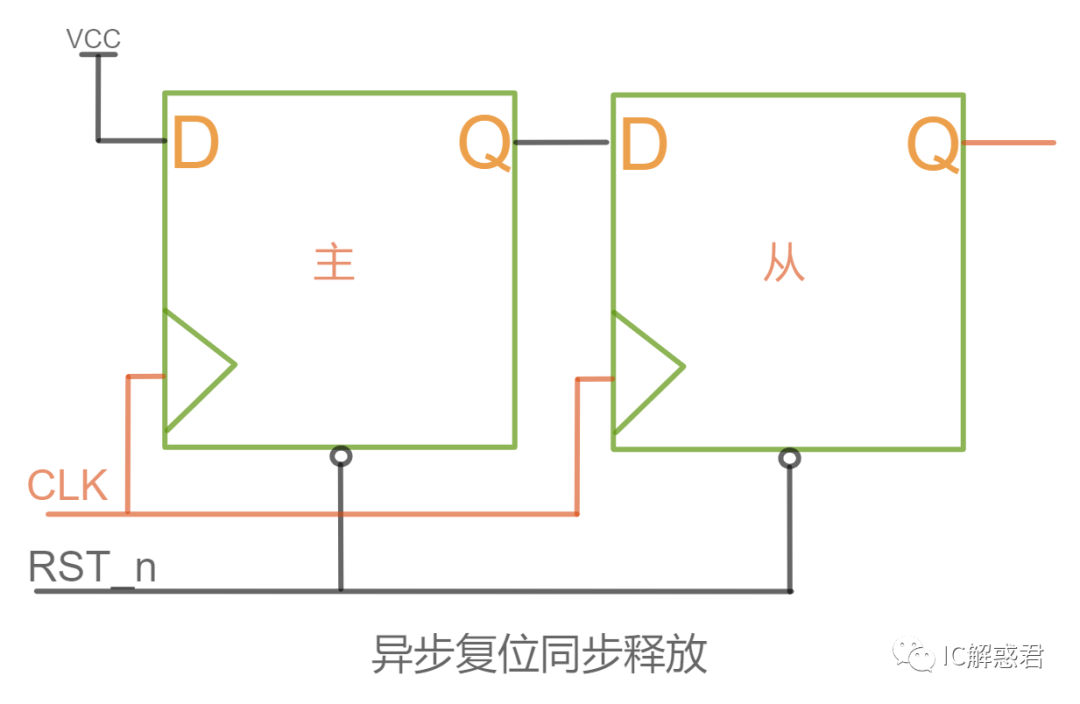
RST_n信號(hào)同時(shí)復(fù)位這兩個(gè)觸發(fā)器,這一對(duì)觸發(fā)器的輸出信號(hào)傳輸并驅(qū)動(dòng)電路中的其他時(shí)序元件完成復(fù)位,最后使整個(gè)相連接的設(shè)計(jì)進(jìn)行復(fù)位。
很明顯可以看出這兩個(gè)觸發(fā)器就是所謂的同步器邏輯。在進(jìn)行數(shù)據(jù)跨時(shí)鐘處理的時(shí)候可以通過該同步器邏輯將一個(gè)時(shí)鐘域的信號(hào)傳輸?shù)搅硪粋€(gè)時(shí)鐘域。
如上圖所示:
當(dāng)復(fù)位信號(hào)被撤銷時(shí):RST_n [0->1],此時(shí)數(shù)據(jù)VCC將在時(shí)鐘的控制下進(jìn)入主觸發(fā)器。如果此時(shí)復(fù)位信號(hào)被撤銷時(shí)候恰好碰到時(shí)鐘的有效沿引起主觸發(fā)器的亞穩(wěn)態(tài)。但是此時(shí)從觸發(fā)器在時(shí)鐘控制下,輸入的是主觸發(fā)器輸出的復(fù)位穩(wěn)定值。
如下圖:雖然主觸發(fā)器在T2時(shí)刻違背了復(fù)位時(shí)間窗口,輸出了Q1亞穩(wěn)態(tài)的搖擺電平。但是從觸發(fā)器此時(shí)的數(shù)據(jù)輸入接收的還是主觸發(fā)器輸出的Q1穩(wěn)態(tài)的復(fù)位狀態(tài)0。所以從觸發(fā)器Q2的輸出是穩(wěn)定的復(fù)位狀態(tài)0。在T3時(shí)刻主觸發(fā)器已經(jīng)從亞穩(wěn)態(tài)狀態(tài)恢復(fù),輸出的是穩(wěn)定的工作狀態(tài)電平了(Q1=1)。T3時(shí)刻從觸發(fā)器采樣的是穩(wěn)定的工作狀態(tài)電平,輸出也是穩(wěn)定的工作狀態(tài)電平,復(fù)位完成。
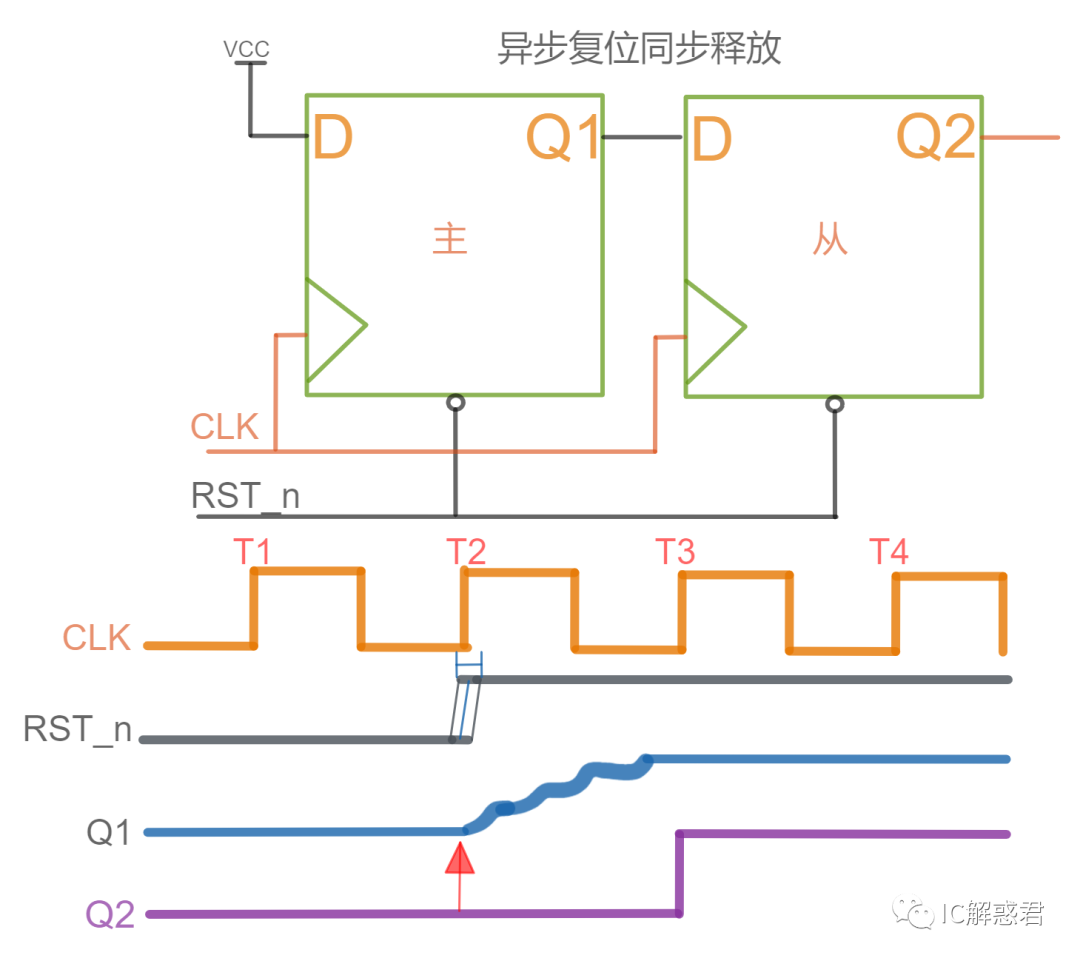
PS:有同學(xué)可能會(huì)問,RST_n既然對(duì)主觸發(fā)器違反復(fù)位時(shí)間窗口,對(duì)從觸發(fā)器來說,也一樣違反了時(shí)間窗口。那從觸發(fā)器為什么就沒有進(jìn)入亞穩(wěn)態(tài)呢?
答:對(duì)于從觸發(fā)器來說,RST_n跳變?cè)谄鋸?fù)位時(shí)鐘窗口內(nèi),所以違反了從觸發(fā)器的復(fù)位時(shí)間窗口,但是從上圖可以觀察到,從觸發(fā)器在T2時(shí)刻時(shí)鐘沿的輸入為Q1=0,在T1時(shí)刻時(shí)鐘沿的輸出為Q2=0,對(duì)于從觸發(fā)器來說,復(fù)位前的狀態(tài)和復(fù)位后的狀態(tài)是一樣的。寄存器內(nèi)部的鎖存器不需要跳變來更新自己的狀態(tài)。所以也就不會(huì)因?yàn)閮?nèi)部鎖存器的電平跳變從而導(dǎo)致亞穩(wěn)態(tài)的發(fā)生。
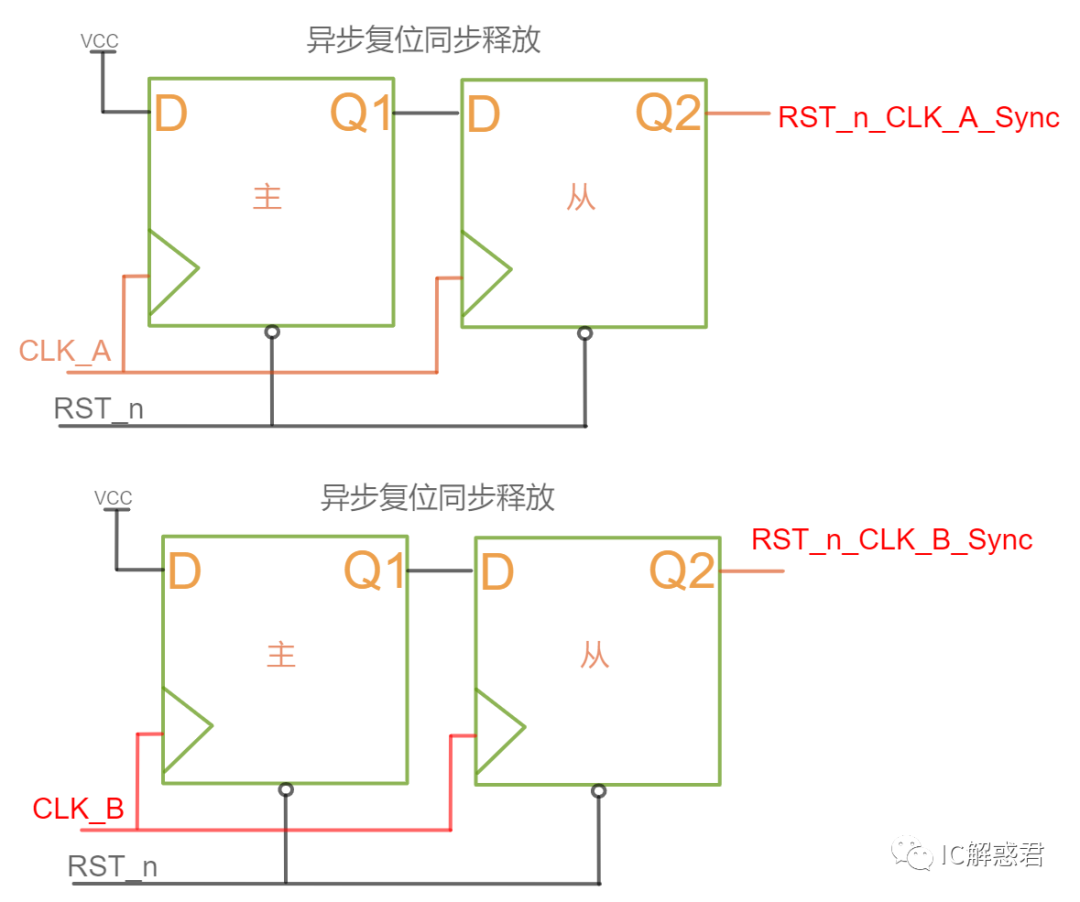
一般來說,完整的一顆SOC芯片內(nèi)部不止有一個(gè)時(shí)鐘,一般會(huì)有多個(gè)時(shí)鐘。所以此時(shí)對(duì)每一個(gè)時(shí)鐘域下的Reset_n信號(hào)都有一套異步復(fù)位同步釋放邏輯。來保證在自己的時(shí)鐘域下,復(fù)位釋放和時(shí)鐘具有同步的關(guān)系,來驅(qū)動(dòng)該時(shí)鐘域下相關(guān)的邏輯和狀態(tài)的變換等操作。如下圖:
結(jié)論:
為了避免在復(fù)位釋放的時(shí)候引起電路亞穩(wěn)態(tài),通常采用異步復(fù)位同步釋放的電路。有效的復(fù)位信號(hào)可以快速復(fù)位相關(guān)聯(lián)的邏輯且不用等待時(shí)鐘的驅(qū)動(dòng)。同時(shí)復(fù)位信號(hào)經(jīng)過異步復(fù)位同步釋放的電路之后,復(fù)位信號(hào)受到時(shí)鐘信號(hào)的控制(復(fù)位信號(hào)釋放不會(huì)在時(shí)鐘沿的任意點(diǎn)),有效避免了因異步復(fù)位信號(hào)的移除而引起的電路亞穩(wěn)態(tài)情況的出現(xiàn)。
審核編輯:劉清
-
IC設(shè)計(jì)
+關(guān)注
關(guān)注
38文章
1295瀏覽量
103918 -
時(shí)序電路
+關(guān)注
關(guān)注
1文章
114瀏覽量
21696 -
移位寄存器
+關(guān)注
關(guān)注
3文章
258瀏覽量
22265 -
觸發(fā)器
+關(guān)注
關(guān)注
14文章
2000瀏覽量
61132 -
時(shí)鐘電路
+關(guān)注
關(guān)注
10文章
236瀏覽量
50717
原文標(biāo)題:漫談--復(fù)位reset
文章出處:【微信號(hào):Rocker-IC,微信公眾號(hào):路科驗(yàn)證】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
什么是復(fù)位同步電路 reset synchronizer?
HT66Fx0系列MCU的Reset復(fù)位電路應(yīng)用介紹
復(fù)位穩(wěn)定放大器:The Reset Stabilized A
上電復(fù)位和按鍵復(fù)位區(qū)別
上電時(shí)實(shí)現(xiàn)延時(shí)系統(tǒng)復(fù)位的IC,reset IC
STM32下載后無法自動(dòng)復(fù)位,需手動(dòng)復(fù)位 下載程序時(shí),勾選reset and run后仍不可自動(dòng)復(fù)位

Reset復(fù)位電路的PCB布局布線要求






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論