


化學通信是一種普遍存在于自然界的現(xiàn)象,它涉及化學信號的釋放、轉移和識別等過程,從而被廣泛用于生命個體之間信息的傳遞。例如,植物使用化學信號來吸引授粉者或驅趕食草動物,一些昆蟲或哺乳動物則可以使用化學信號來尋找配偶或標記其領地。這些現(xiàn)象引起了研究者們的廣泛興趣,并被試圖用于傳感器或機器人等人造智能系統(tǒng)。
為了開發(fā)機器人的化學通信技術,其中一個關鍵是使它們能夠以一種穩(wěn)健、適應性強的方式感知環(huán)境并與之交互。最行之有效的方法之一是引入基于電信號的傳感,它能賦予機器人感知環(huán)境中電荷的能力。然而,僅僅依靠電傳感仍然不足以管理機器人之間的交互,學者們需要尋找控制機器人釋放化學物質的方法,從而控制信號的發(fā)射以實現(xiàn)更全面的機器人之間的通信。
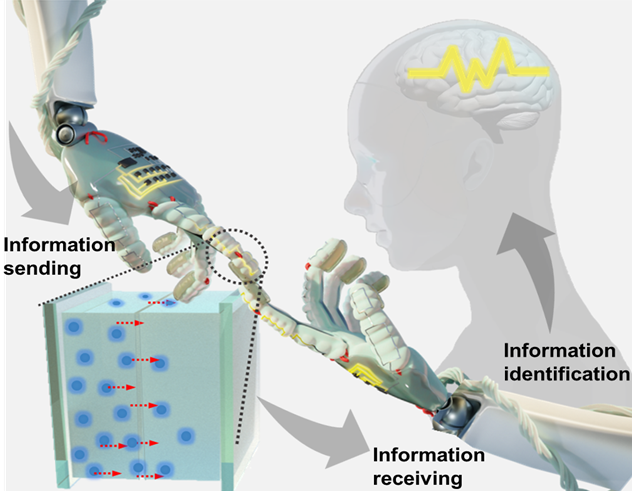
圖1 機器人通過皮膚接觸并在輸入信號控制下實現(xiàn)化學信號的釋放、接收和識別的示意圖
近期,來自荷蘭埃因霍溫理工大學(Eindhoven University of Technology)的劉丹青教授和Dirk J. Broer教授團隊開發(fā)了一種基于光響應的人造皮膚,實現(xiàn)了化學信號物質的控制釋放、傳遞和接收。這種人造皮膚由液晶聚合物網(wǎng)絡制備而成,其中,信號化學物質被預先裝載在人造皮膚中,可以通過光照觸發(fā)皮膚收縮變形來釋放信號化學物質。此外,皮膚中內置了一個固有的傳感器,用于感知環(huán)境電荷信號。當其接收到來自其他機器人皮膚釋放的化學物質時,作為接收端的機器人皮膚可以表現(xiàn)出透明度變化和電信號變化。該研究設計的人造聚合物皮膚層間的化學通信的方法不僅能夠使化學物質在兩個涂層之間轉移,還可以通過不同的路徑實現(xiàn)涂層之間的多重轉移,將這種方法提升到了更先進的水平。
此外,每兩個涂層中的載荷可以是不同的化學物質。化學物質在皮膚之間轉移后,會發(fā)生反應,生成所需的新的化學物質。這一功能極大地增強了這種機器人感知系統(tǒng)的復雜性和微妙性,為機器人控制和交互的新可能性鋪平了道路。該工作以“Facilitating Inter-Skin Communication in Artificial Polymer Systems through Liquid Transfer”為題發(fā)表在《Advanced Materials》期刊上。埃因霍溫理工大學博士生張東鈺為論文第一作者,埃因霍溫理工大學劉丹青教授為論文通訊作者 。
人造智能皮膚的光調控化學信息釋放原理
使智能皮膚從發(fā)送端釋放化學信息物質的原理是基于紫外光誘偶氮苯的順反異構化。具體來說,偶氮苯異構化使液晶分子有序度降低,液晶聚合物沿著分子取向方向收縮,并在垂直于取向方向的平面膨脹。在涂層配置中,由于對剛性基材的強粘附力,面內膨脹受到限制。因此,垂直排列的聚合物涂層的厚度減少了5%,進而導致孔隙收縮并對液體施加壓力,從而排出液體化學物質。其中液體釋放的速率可以通過改變光源的強度來進行微調。
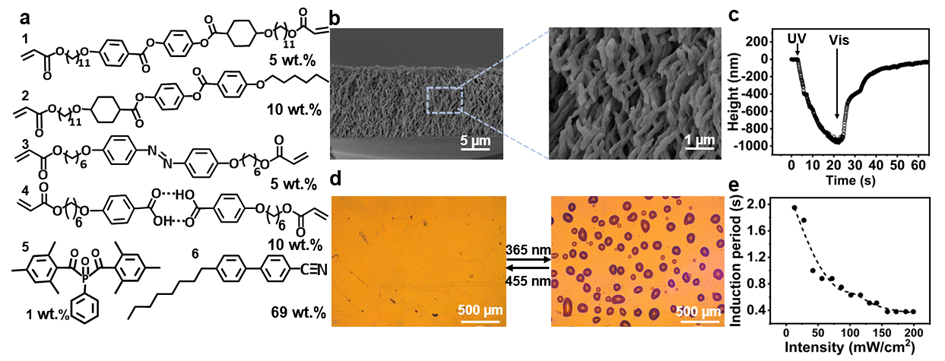
圖2 人造智能皮膚的結構設計及光響應性液體物質的控制釋放原理
人造智能皮膚化學信息接收端的感應
為實現(xiàn)對接收到化學物質的感應,研究者將人造皮膚制備在帶有叉指電極(IDE)陣列的基板上,該陣列通過基于接收物質電荷產生的電信號變化檢測傳輸液體的量。這里連接著人造皮膚的叉指電極兩端的動態(tài)電阻被實時監(jiān)測,當有化學物質被接受到時,電阻產生瞬時下降。通過擬合電阻值和接收到液體化學物質含量的函數(shù),電阻值成為可以被解析的信號。
不僅如此,該化學信號傳輸過程被可視化,研究者將接收器的IDE與發(fā)光二極管燈泡及直流電源連接來創(chuàng)建串聯(lián)電路。當接收到液體化學物質后,接收器的電阻驟降,并引起電路中的電流增大,從而啟動LED燈泡發(fā)光。
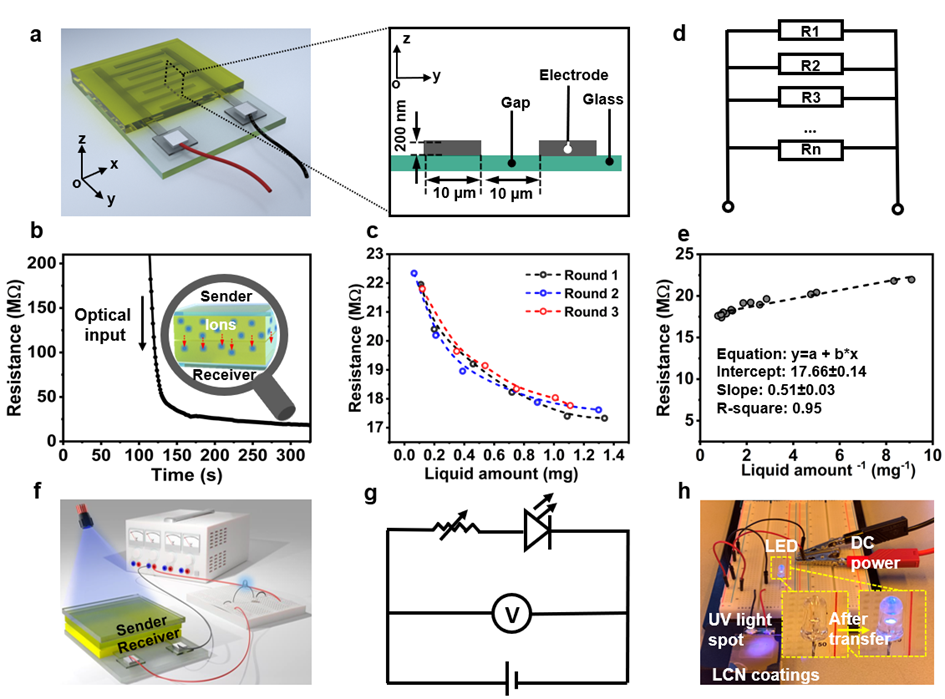
圖3 基于電荷信號感應實現(xiàn)化學通信過程中的信息接收
人造智能皮膚通過化學反應實現(xiàn)圖案化信息傳遞和接收
為了進一步開發(fā)該化學信號傳輸系統(tǒng),研究者向發(fā)送端和接收端涂層分別填充了載有硫氰化鉀和三氯化鐵的液體。選擇這些特定試劑是因為它們能夠反應產生有色產物,促進直接視覺信號傳導。圖4清楚地表明,在暴露于紫外線照射下時,液體傳輸使得涂層接觸的區(qū)域幾秒鐘內就會產生強烈的紅色。
在此過程中,研究者繼續(xù)升級了裝置設計,在輸入光源信號和發(fā)送端涂層之間插入光掩模,如圖4所示。當光信號輸入到發(fā)送端后,光掩模上包含的圖像信息就會被印到接收器。印記在接收端皮膚上的圖像可以停留1小時以上,并且可以用水擦除。通過利用這種遠距離傳輸方法,可以實現(xiàn)500 μm的圖像打印分辨率。
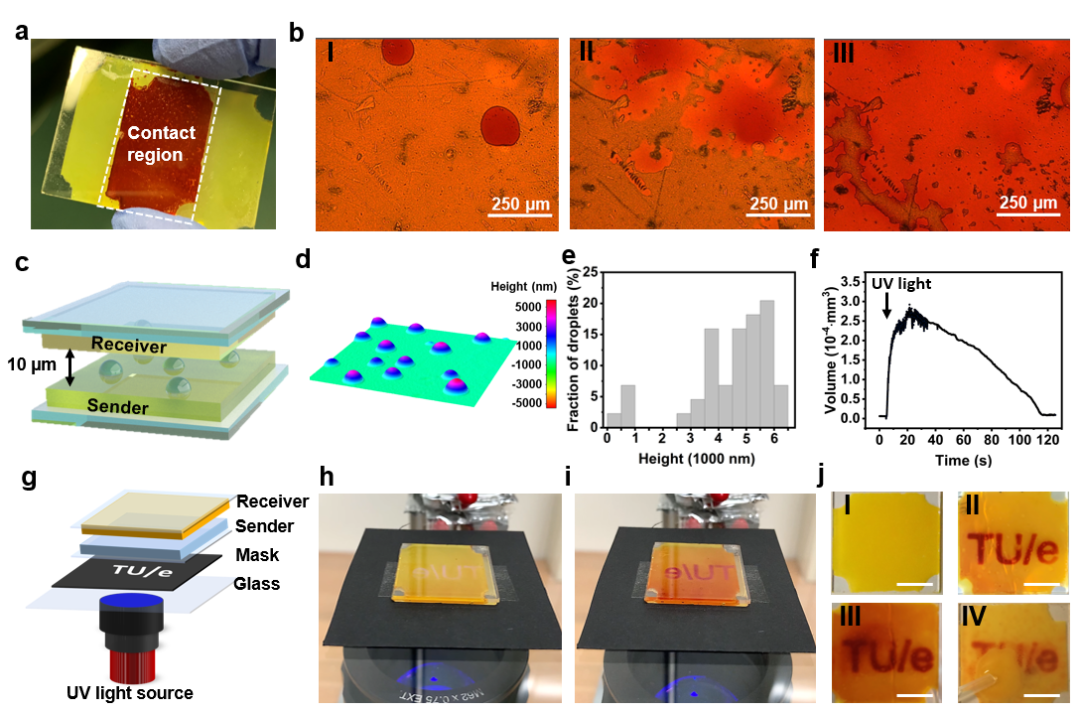
圖4 化學反應用于化學通信中圖案化信息的接收
總體而言,該項工作為智能通信材料的開發(fā)提供了一種思路,該方法成功地模擬了生物傳感系統(tǒng)中復雜的交互過程,從而為機器人傳感和控制相關領域的新發(fā)展鋪平了道路。未來的努力將致力于探索智能皮膚中嵌入多個傳感器的協(xié)調性及其更好的適應性,使機器人在各種復雜場景中更具協(xié)作性和高效性。
論文鏈接: https://doi.org/10.1002/adma.202312428
審核編輯:劉清
-
傳感器
+關注
關注
2565文章
52861瀏覽量
766194 -
機器人
+關注
關注
213文章
29664瀏覽量
212434 -
led燈
+關注
關注
22文章
1596瀏覽量
109594 -
直流電源
+關注
關注
9文章
1374瀏覽量
53899 -
電信號
+關注
關注
1文章
843瀏覽量
21074
原文標題:基于光響應的人造皮膚,用于機器人之間的化學通信
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
明遠智睿SSD2351開發(fā)板:語音機器人領域的變革力量
盤點#機器人開發(fā)平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
光伏清潔機器人4G之痛,LoRa通訊取而代之?

柔性電子技術革新與人形機器人的電子皮膚應用前景

日本推出革命性的人形機器人
漫途LoRa通信系統(tǒng),讓光伏機器人實現(xiàn)無“線”管理

2030年人形機器人電子皮膚市場規(guī)模將達90.5億!

電子皮膚:助力居家服務機器人成為專業(yè)的“育嬰師”





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論