") 百度Apollo City Driving Max榮獲「年度智駕系統(tǒng)」
百度Apollo City Driving Max榮獲「年度智駕系統(tǒng)」
近日,第八屆“尋找有情感的出行伴侶”年度智能座駕評(píng)選頒獎(jiǎng)典禮圓滿舉辦,百度純視覺(jué)高階智駕產(chǎn)品Apollo City Driving Max榮獲「年度智駕系統(tǒng)」獎(jiǎng)項(xiàng),“年度智能座駕評(píng)選”由智駕網(wǎng)主辦,評(píng)選標(biāo)準(zhǔn)對(duì)標(biāo)中汽研等專業(yè)機(jī)構(gòu)標(biāo)準(zhǔn),經(jīng)過(guò)多年細(xì)化,更強(qiáng)調(diào)消費(fèi)者用車的真實(shí)場(chǎng)景與體驗(yàn),是業(yè)內(nèi)最為專業(yè)、評(píng)選范圍最為廣泛、影響力最大的智能汽車車型評(píng)選活動(dòng)。
根據(jù)L2+智駕功能逐漸成為新上市車型核心配置、高速NOA升級(jí)為城市NOA、更高效且成本更低的視覺(jué)方案迅速量產(chǎn)落地等行業(yè)變化,本屆年度智能座駕評(píng)選進(jìn)一步細(xì)化、優(yōu)化測(cè)試場(chǎng)景,對(duì)入圍車型進(jìn)行城市真實(shí)道路評(píng)測(cè)、專業(yè)場(chǎng)地評(píng)測(cè)、以及專業(yè)設(shè)備評(píng)測(cè),加大在城市LCC、高速NOA、城市NOA、自動(dòng)泊車、記憶泊車等維度進(jìn)行真實(shí)場(chǎng)景的評(píng)測(cè)。
此次百度Apollo City Driving Max獲得「年度智駕系統(tǒng)」獎(jiǎng)項(xiàng),不僅彰顯了行業(yè)對(duì)百度Apollo在智駕領(lǐng)域技術(shù)實(shí)力的高度認(rèn)可,也標(biāo)志著智能駕駛技術(shù)發(fā)展新標(biāo)桿的誕生。
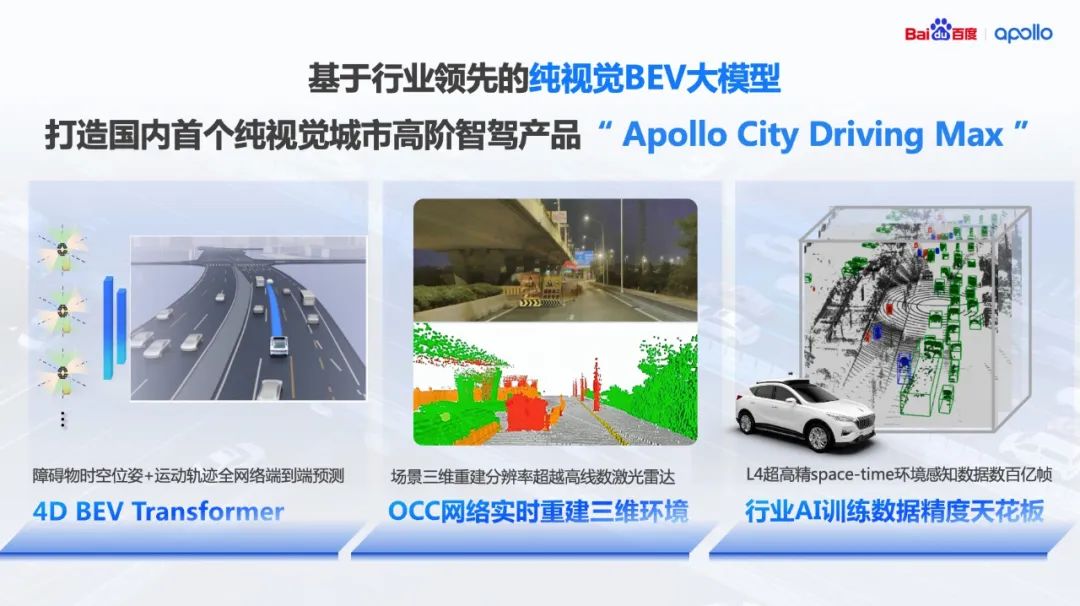
2023年,百度Apollo推出國(guó)內(nèi)首個(gè)可量產(chǎn)的純視覺(jué)高階智駕產(chǎn)品Apollo City Driving Max,產(chǎn)品一經(jīng)推出,迅速引發(fā)行業(yè)關(guān)注。在行業(yè)還處于“硬件狂堆料”的時(shí)代,百度Apollo創(chuàng)新性地使用“BEV+OCC+Transformer”純視覺(jué)方案,打造覆蓋泊車、高速、城市全域場(chǎng)景的高階智駕產(chǎn)品,成功實(shí)現(xiàn)“去激光雷達(dá)”。即便在復(fù)雜城市道路場(chǎng)景,也能為用戶帶來(lái)與“有激光雷達(dá)”方案同樣好的產(chǎn)品體驗(yàn),且BOM成本更低,讓整車更有價(jià)格競(jìng)爭(zhēng)力。
領(lǐng)跑整個(gè)行業(yè)背后是百度Apollo多年的技術(shù)投入與積累。智駕行業(yè)發(fā)展初期,使用激光雷達(dá)可以降低算法研發(fā)難度,是行業(yè)普遍選擇的方案。但實(shí)際上,在硬件局限條件下,激光雷達(dá)智駕方案算法上限低,后期迭代速度慢,并會(huì)很快到達(dá)天花板。相較之下,純視覺(jué)智駕方案的算法上限更高、后期演進(jìn)速度更快、且用戶體驗(yàn)更好,但該方案前期啟動(dòng)速度緩慢,想要實(shí)現(xiàn)技術(shù)突破非常難。
百度Apollo最初便選擇了一條更艱難的研發(fā)之路,2019年推出純視覺(jué)方案Apollo Lite,并在該領(lǐng)域持續(xù)深耕。近一年,隨著視覺(jué)大模型取得了巨大技術(shù)突破,百度Apollo在Apollo Lite框架基礎(chǔ)上,用4D BEV Transformer全新升級(jí)第二代純視覺(jué)感知系統(tǒng),能夠“快、準(zhǔn)、穩(wěn)”地預(yù)測(cè)道路參與者的時(shí)空位姿軌跡,同時(shí),配合業(yè)內(nèi)最前沿的占用網(wǎng)絡(luò)OCC技術(shù),對(duì)靜態(tài)環(huán)境做端到端實(shí)時(shí)重建,可以獲取比激光雷達(dá)點(diǎn)云分辨率更高的三維結(jié)構(gòu)信息。
此外,百度Apollo還擁有高質(zhì)量的Robotaxi原始數(shù)據(jù)積累,為純視覺(jué)智駕方案打下“冷啟動(dòng)”數(shù)據(jù)基礎(chǔ)。超過(guò)170億參數(shù)的視覺(jué)大模型、日均產(chǎn)能百萬(wàn)幀的自動(dòng)化標(biāo)注產(chǎn)線、上億幀的BEV+OCC精標(biāo)訓(xùn)練數(shù)據(jù),也加速了純視覺(jué)方案的打造與后續(xù)優(yōu)化。
基于此,2023年百度Apollo推出國(guó)內(nèi)首個(gè)純視覺(jué)BEV+Transformer動(dòng)態(tài)障礙物感知技術(shù)、國(guó)內(nèi)首個(gè)OCC占用網(wǎng)絡(luò)技術(shù),國(guó)內(nèi)首個(gè)可量產(chǎn)的純視覺(jué)城市高階智駕產(chǎn)品,目前均已在極越01實(shí)現(xiàn)量產(chǎn)。在百度Apollo技術(shù)賦能下,極越01能夠?qū)崿F(xiàn)對(duì)障礙物更加精細(xì)的刻畫,3D精度可以做到厘米級(jí),比肩甚至超過(guò)激光雷達(dá)精度。
隨著AI技術(shù)與大模型的快速演進(jìn)與深度應(yīng)用,百度Apollo將在高階智能駕駛領(lǐng)域持續(xù)深耕,進(jìn)一步降低城區(qū)高階智能駕駛功能的上車成本,為更多用戶帶來(lái)更安全、更易用的智駕體驗(yàn)。
審核編輯:劉清
-
百度
+關(guān)注
關(guān)注
9文章
2268瀏覽量
90363 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2505瀏覽量
48736 -
ai技術(shù)
+關(guān)注
關(guān)注
1文章
1266瀏覽量
24287
原文標(biāo)題:榮獲「年度智駕系統(tǒng)」,百度Apollo City Driving Max引領(lǐng)高階智駕新篇章
文章出處:【微信號(hào):baiduidg,微信公眾號(hào):Apollo智能駕駛】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
百度Apollo開(kāi)放平臺(tái)10.0正式發(fā)布
百度獲香港首個(gè)自動(dòng)駕駛先導(dǎo)牌照
宏景智駕榮獲2024年度TOP50智能汽車硬科技創(chuàng)新獎(jiǎng)
百度計(jì)劃海外推出蘿卜快跑無(wú)人駕駛服務(wù)
供應(yīng)商網(wǎng)2024年榮獲百度聯(lián)盟-創(chuàng)領(lǐng)風(fēng)華獎(jiǎng)
禾賽科技獨(dú)供百度Apollo新一代無(wú)人車主激光雷達(dá)
2024百度移動(dòng)生態(tài)萬(wàn)象大會(huì):百度新搜索11%內(nèi)容已AI生成
百度發(fā)布全球首個(gè)L4級(jí)自動(dòng)駕駛大模型
百度Apollo計(jì)劃年內(nèi)部署千臺(tái)無(wú)人車
百度發(fā)布全球首個(gè)L4級(jí)自動(dòng)駕駛大模型Apollo ADFM
百度自動(dòng)駕駛蘿卜快跑入選“2023年度中國(guó)車谷經(jīng)濟(jì)高質(zhì)量發(fā)展企業(yè)”
百度王云鵬:自動(dòng)駕駛終于迎來(lái)“曙光初現(xiàn)”
百度Apollo榮獲「年度智能駕駛企業(yè)」大獎(jiǎng)引領(lǐng)高階智駕新時(shí)代





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論