 ROS系統的智能車開發-基于米爾芯馳MYD-JD9X開發板
ROS系統的智能車開發-基于米爾芯馳MYD-JD9X開發板
本篇測評由電子工程世界的優秀測評者“mameng”提供。
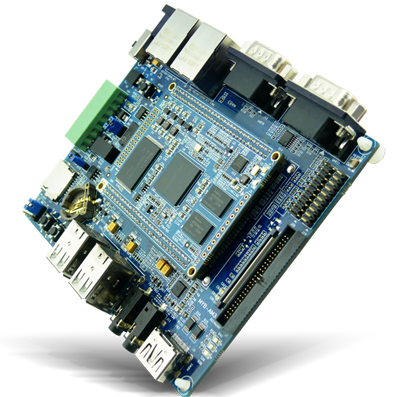
本文將介紹基于米爾電子MYD-JD9X開發板的ROS系統智能車開發。目前實現ROS的方式主要有兩種:Ubuntu系統+ROS;Ubuntu系統+docker+ROS鏡像;使用dockers運行ROS鏡像的部署方式,可以大大加快設備部署、移植工作。

參考連接https://wiki.ros.org/noetic/Installation/Ubuntu1、配置ubuntu的軟件和更新
sudo apt updatesudo apt-get install ros-melodic-desktop-full
2、設置安裝源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
wget -O /etc/apt/sources.list https://mirrors.huaweicloud.com/repository/conf/Ubuntu-Ports-bionic.list
3、設置key安裝
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
4、配置環境變量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsource ~/.bashrc
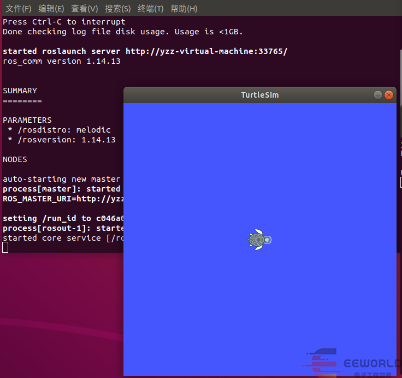
5、測試運行ros里經典的小海龜例程
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key
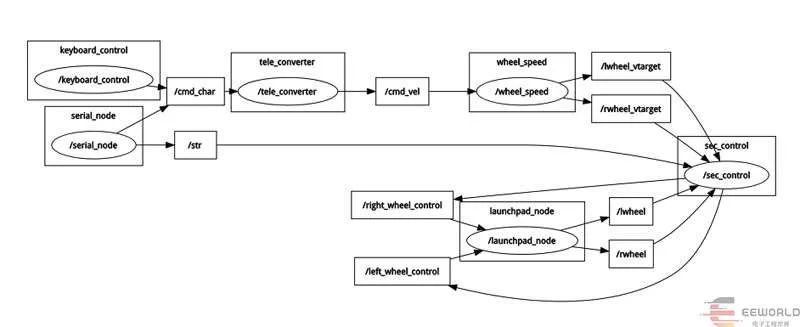
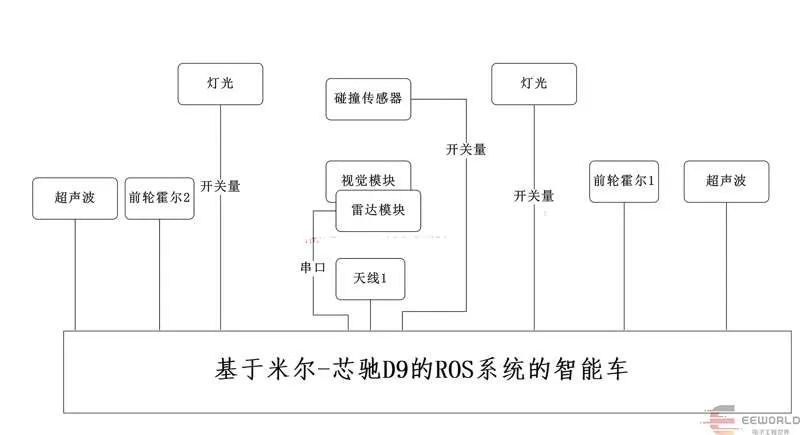
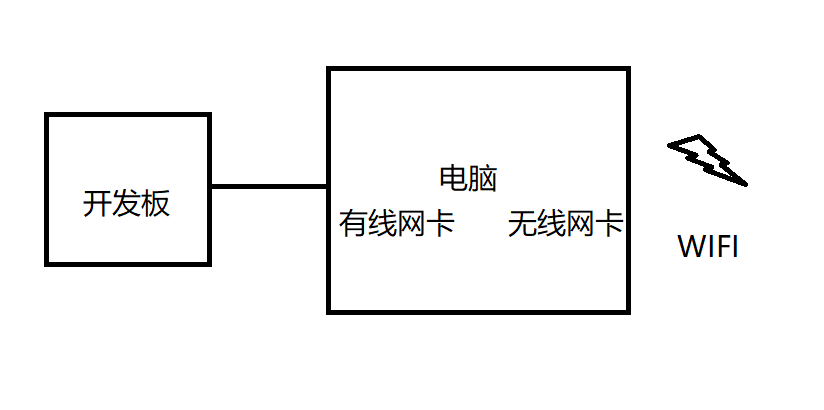
米爾-芯馳MYD-JD9X的ROS系統的智能車架構:
-
開發板
+關注
關注
25文章
5032瀏覽量
97371 -
ROS
+關注
關注
1文章
278瀏覽量
17001 -
米爾
+關注
關注
0文章
51瀏覽量
7931
發布評論請先 登錄
相關推薦
國產開發板上打造開源ThingsBoard工業網關--基于米爾芯馳MYD-JD9X開發板

【米爾-芯馳D9360商顯板試用評測】米爾-芯馳D9360商顯板開發環境搭建
【MYD-Y6ULX申請】米爾MYD-Y6ULX智能酒駕識別系統
米爾科技MYD-AM335X開發板 介紹
米爾MYD-J1028X開發板試用體驗
【米爾MYD-J1028X開發板試用體驗】硬件介紹+上電體驗
【米爾MYD-YT507開發板試用體驗】Ubuntu的xfce桌面環境建立及遠程穿透訪問家中米爾MYD-YT507開發板
米爾上新!芯馳D9多核Cortex-A55核心板,國產高安全性車規級平臺

追加名額丨米爾瑞芯微RK3576開發板有獎試用





 工商網監
工商網監
評論