 伺服電機的結構和工作原理是什么
伺服電機的結構和工作原理是什么
伺服電機是一種特殊的電機,能夠根據控制信號的反饋信息來調整輸出轉速和位置,具有較高的精度和響應速度,廣泛應用于機械控制系統中。本文將詳細介紹伺服電機的結構和工作原理。
一、結構
伺服電機主要由電機本體、傳感器、控制回路組成。
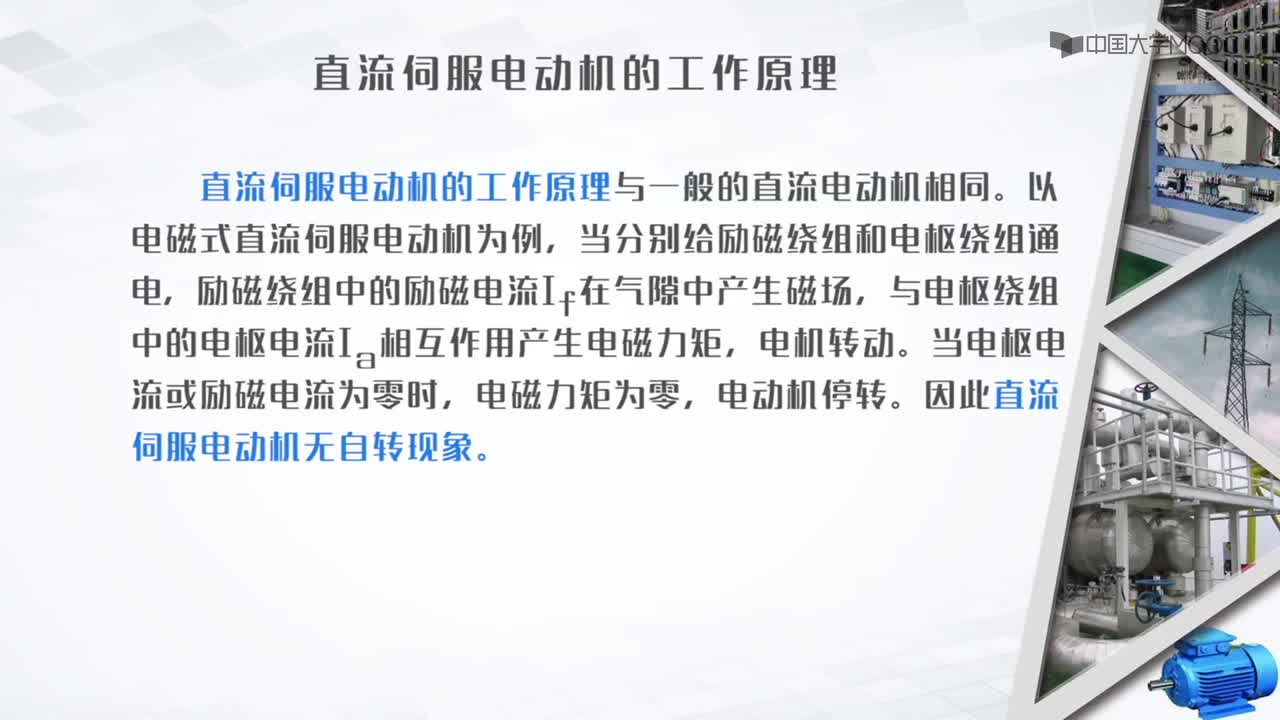
1.電機本體:伺服電機的電機本體通常采用直流電機或交流電機。直流伺服電機主要由電樞、電樞套、永磁體、換向器和電刷等組成。交流伺服電機則有定子和轉子兩部分組成。電機本體的質量、功率和轉速等參數,決定了伺服電機的性能。
2.傳感器:傳感器用于檢測電機的位置和轉速等信息,并將這些信息反饋給控制回路。常見的傳感器包括編碼器、光電開關和霍爾傳感器等。其中,編碼器是最常用的傳感器,它可以將轉動運動轉換為脈沖信號,從而提供精確的位置和轉速信息。
3.控制回路:控制回路是伺服電機的核心部分,主要由運算放大器、比例積分控制器、驅動器和反饋信號處理模塊等組成。控制回路的主要功能是接收傳感器的反饋信號,與設定值進行比較,并根據比較結果輸出控制信號,驅動電機運動。運算放大器用于放大控制信號,比例積分控制器用于調整控制信號的幅值和相位,驅動器則將控制信號轉換為電機電壓或電流輸出。
二、工作原理
伺服電機的工作原理可以簡單分為三步驟:感知、比較和控制。
1.感知:在伺服電機中,傳感器用于感知電機的位置和轉速等信息。傳感器通過與轉子或裝在轉子上的磁軌相互作用,生成與轉子位置相關的脈沖信號。傳感器還可以測量電機的轉速,如通過感應轉子上的磁場變化來測量轉速。
2.比較:感知到的位置和轉速信息會被傳送到控制回路中進行比較。控制回路中的比例積分控制器將傳感器反饋的信號與設定值進行比較,得出誤差信號。如果誤差信號大于零,則需要調整電機的輸出使其減小;反之,如果誤差信號小于零,則需要增加電機的輸出。
3.控制:比較得出的誤差信號將被控制回路進行處理,并輸出控制信號。控制信號經過驅動器轉換為適合電機的電壓或電流信號,并驅動電機。通過不斷調整輸出信號,使得電機的位置和轉速逐漸接近設定值。同時,控制回路還能對電機的動態特性進行補償,提高電機的控制精度和響應速度。
伺服電機的工作原理基于反饋控制系統的閉環原理,通過不斷感知、比較和調整,實現了對電機位置、轉速和力矩等參數的精確控制。伺服電機具有高精度、高響應速度和穩定性好等優點,在自動化設備和機械控制系統中得到廣泛的應用。
-
傳感器
+關注
關注
2557文章
51729瀏覽量
758800 -
伺服電機
+關注
關注
85文章
2069瀏覽量
58576 -
控制信號
+關注
關注
0文章
169瀏覽量
12092 -
控制回路
+關注
關注
3文章
105瀏覽量
15595
發布評論請先 登錄
相關推薦


直流、交流伺服電機的結構及工作原理。
直流伺服電機的結構與工作原理
直流和交流伺服電機的結構及工作原理
伺服電機結構及工作原理
交流永磁同步伺服電機的結構和工作原理的介紹

伺服電機的引腳圖/工作原理/應用





 工商網監
工商網監
評論