 伺服電機是不是也可以改變“相序”來實現電機正反轉呢?
伺服電機是不是也可以改變“相序”來實現電機正反轉呢?
伺服電機是不是也可以改變“相序”來實現電機正反轉呢?
伺服電機是一種常見的電動執行器,廣泛應用于工業自動化、機器人、CNC機床等領域。除了控制轉速和位置精度外,伺服電機還可以實現正反轉功能。反轉操作是工業自動化中經常需求的功能之一。本文將詳細介紹伺服電機的反轉原理以及相序調整方法。
一、伺服電機反轉原理
在介紹伺服電機反轉原理之前,我們先來了解一下伺服電機的基本工作原理。伺服電機由電機、編碼器和控制器三部分組成。電機負責提供動力,編碼器用于測量轉子的位置信息,控制器根據編碼器反饋的信號實現對電機的控制。伺服電機的正轉和反轉通過改變電流的方向來實現。
伺服電機采用的編碼器通常是增量式編碼器。增量式編碼器通過兩路正交信號A和B來測量轉子的角度。根據A、B兩個信號的周期和相位差,可以確定轉子的角度和轉速。當電機處于正轉狀態時,A信號可能先出現,然后B信號出現;當電機處于反轉狀態時,B信號可能先出現,然后A信號出現。控制器根據編碼器信號的變化來判斷電機運動的方向,并改變電流的方向實現正反轉。
二、伺服電機相序調整方法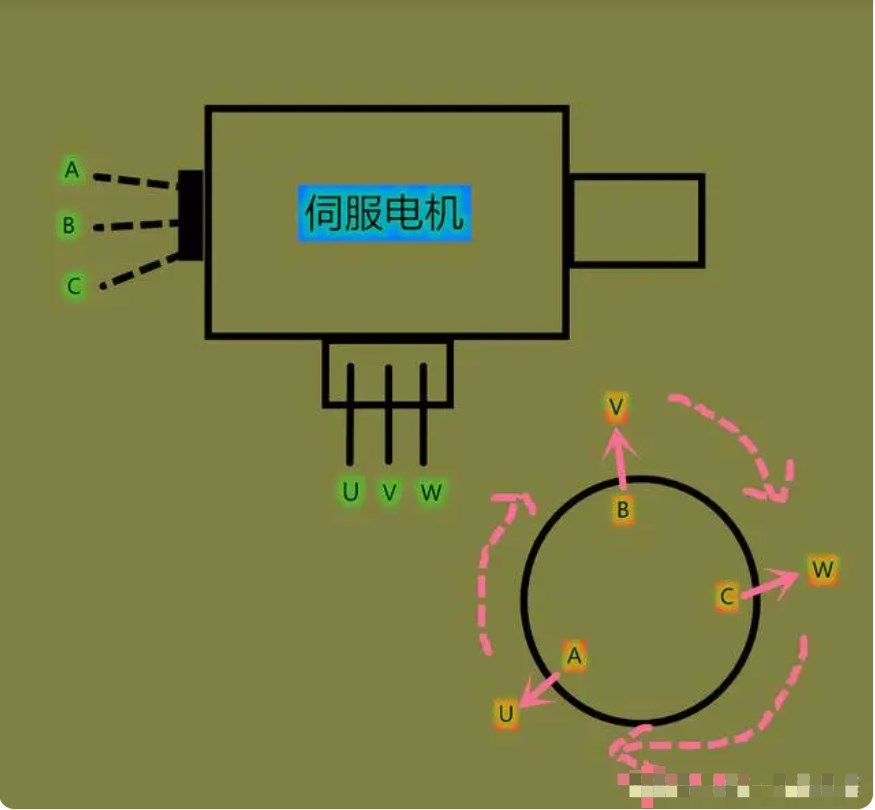
伺服電機的相序調整指的是改變編碼器的A、B信號的極性,以調整電機的正反轉方向。下面介紹兩種常見的相序調整方法。
1. 軟件設置
現代的伺服電機控制器通常都具備軟件配置功能,可以通過修改控制器的參數來實現相序調整。通常在電機配置界面或參數設置界面,可以找到相序調整選項。用戶可以通過修改相序的設置來實現電機的正反轉。
相序調整的具體步驟一般如下:
- 連接伺服電機和控制器,確保通信正常。
- 進入電機配置界面或參數設置界面。
- 找到相序調整選項,并根據需要選擇正轉或反轉。
- 保存配置并重新啟動電機。
不同的伺服電機控制器設置界面可能會有所不同,具體操作請參考相關的用戶手冊或技術文檔。
2. 信號線調換
另一種相序調整的方法是通過調換編碼器A、B信號線的連接方式來實現。通過調換信號線的連接,可以改變A、B信號的相位差,從而調整電機的正反轉方向。
相序調整的具體步驟如下:
- 將電機和控制器斷開電源,確保安全。
- 找到伺服電機和控制器的編碼器信號線。
- 調換A、B信號線的連接方式,如將A信號線連接到原本的B信號端口,將B信號線連接到原本的A信號端口。
- 確保連接穩固后,重新通電使調換后的信號線生效。
需要注意的是,信號線調換方法需要進行實物操作,因此相對來說操作風險較大,需要更加謹慎。在操作之前務必關閉電源,確保安全。
結論:
伺服電機的正反轉是通過改變電流方向來實現的。在工業自動化和機器人領域,正反轉功能經常被應用到實際控制中。相序調整是實現伺服電機正反轉的一種常見方法,可以通過軟件設置或信號線調換來實現。根據實際需求和具體控制器的支持,選擇相應的方法即可實現電機的正反轉功能。
-
伺服電機
+關注
關注
85文章
2044瀏覽量
57810 -
電機正反轉
+關注
關注
1文章
23瀏覽量
7666
發布評論請先 登錄
相關推薦
無刷電機正反轉由什么控制
步進電機的正反轉實現方法
步進電機正反轉的換線方法






 工商網監
工商網監
評論