 電機類型劃分
電機類型劃分
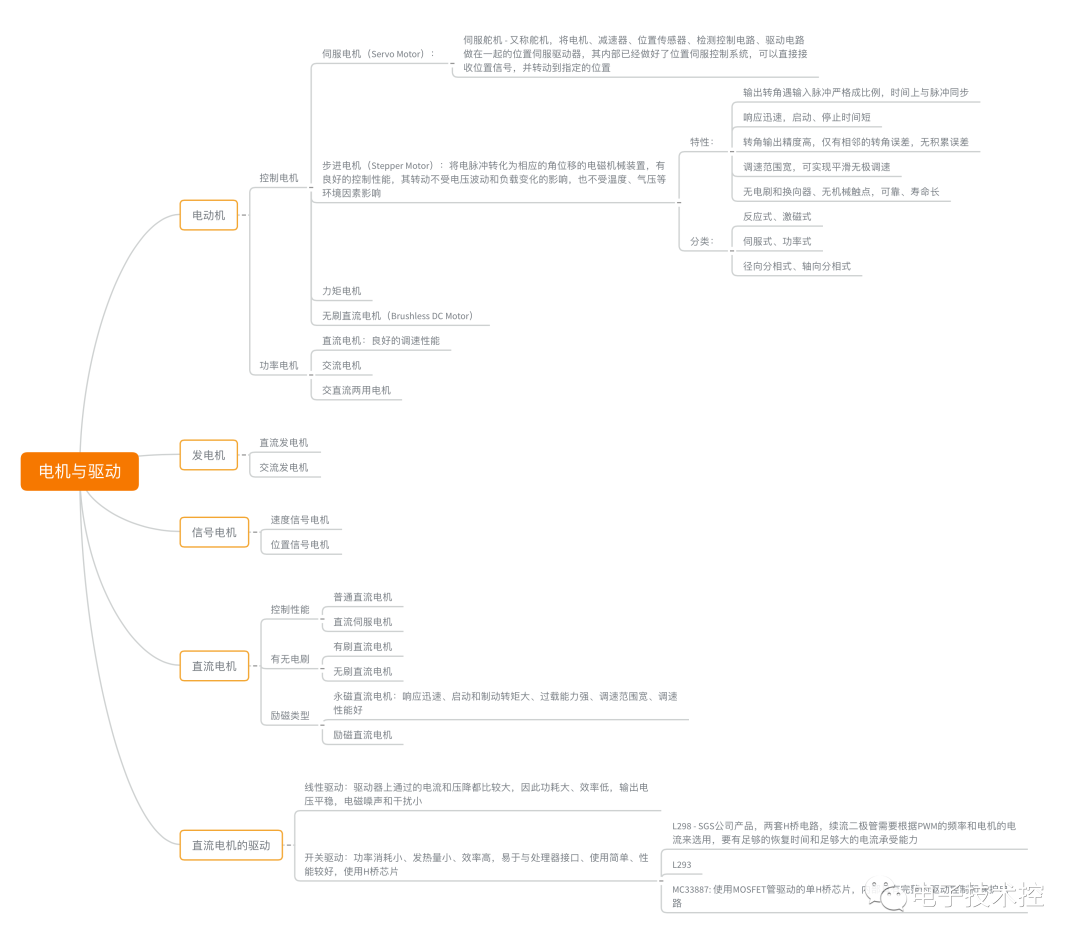
電機是典型的將電能轉化為機械能的設備,其是大多數機器人的執行部件。可以說,選擇一款性能優越的電機可以使得機器人的性能得到充分的展示。因而電機在機器人中的應用極其廣泛。電機的類型劃分可以從不同角度給出不同的類別,但是一般工程師是根據自己的實際的需求進行劃分:在速度要求高的場合會選擇直流電機,精度要求高,速度要求低的場合會選用不僅電機,電機輸出功率較大的場合會采用交流電機。
1 電機類型劃分
1.1 直流電機
直流電機可以劃分為直流有刷電機,直流有刷減速電機,直流無刷電機,直流無刷減速電機。從字面可以理解,直流電機和直流減速電機的區別是直流減速電機的輸出軸端安裝有電機的減速器,減速器會使得電機的速度明顯下降,但是電機的輸出力矩會明顯增大。
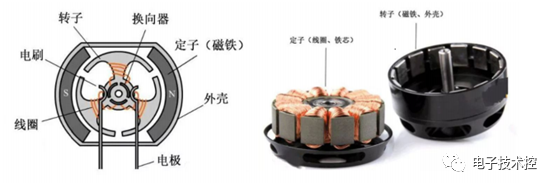
有刷直流電機(左側)和無刷直流電機(右側)
直流電機調速范圍寬,調速特性平滑。且直流電機的過載能力強,啟動和制動轉矩大。
1.2 步進電機
步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比。因此,步進電動機又稱脈沖電動機
步進電機分三種:永磁式(PM) ,反應式(VR)和混合式(HB)永磁式步進一般為兩相,轉矩和體積較小,步進角一般為7.5度 或15度;反應式步進一般為三相,可實現大轉矩輸出,步進角一般為1.5度,但噪聲和振動都很大。在歐美等發達國家80年代已被淘汰;混合式步進是指混合了永磁式和反應式的優點。它又分為兩相和五相:兩相步進角一般為1.8度而五相步進角一般為 0.72度。這種步進電機的應用最為廣泛。
步進電機可以在很寬的范圍內改變脈沖頻率調速。其典型的應用包括數控機床、繪圖儀、軋鋼機和記錄儀等方面。總之步進電機的特點是:
(1) 快速啟動、正反轉、停轉、在很寬的范圍內調速
(2) 一個脈沖對應的位移量小,步距角精度高,不得丟步
(3) 輸出力矩大,直接帶負載
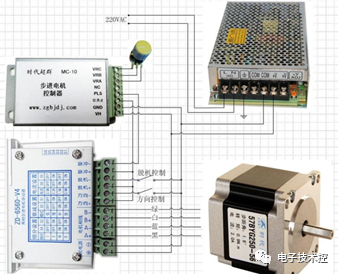
步進電機接線圖
1.3伺服電機
伺服電機相對前面的電機類型更加強調電機的閉環控制。一般來說伺服電機會有專門的伺服電機驅動器。且伺服電機可以分為直流伺服電機以及交流伺服電機。
1.4 舵機
舵機是一種方面搭建快速搭建原型機的電機類型。其一般是由小型直流電機+控制電路板+電位計+齒輪組合而成。舵機有多種劃分方式。
按照轉動角度極限劃分,舵機可分為:90度舵機、180度舵機、270度舵機和360度舵機;
按照信號類型可以劃分為:模擬舵機和數字舵機;其中模擬舵機中無微控制器,電機由模擬信號控制;而數字舵機是由MCU微控制器控制,性能較好;
按照傳動系統劃分:金屬齒輪舵機和塑料齒輪舵機;其中金屬齒輪舵機價高,且扭矩大適合告訴場合,而塑料齒輪舵機屬于低成本,適用于中低扭矩場合。
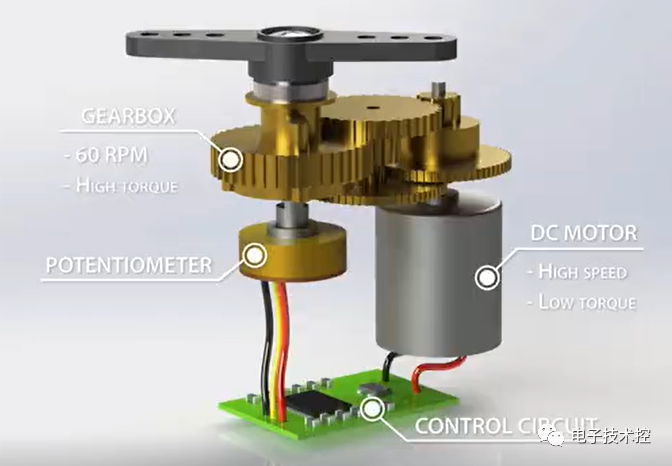
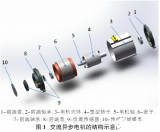
舵機構造
舵機六足機器人
舵機四足機器人跌倒翻身
審核編輯:湯梓紅
-
直流電機
+關注
關注
36文章
1710瀏覽量
70156 -
電機
+關注
關注
142文章
9000瀏覽量
145337 -
步進電機
+關注
關注
150文章
3109瀏覽量
147443
原文標題:電機與驅動分類一圖詳解
文章出處:【微信號:電子技術控,微信公眾號:電子技術控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
TYCO連接器產品類型怎么劃分?
對《營運客車類型劃分及等級評定》的學習與思考
小功率電機CCC單元劃分原則
淺談減速機按傳動類型該如何劃分






 工商網監
工商網監
評論