什么是CAN?
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱,是如今是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一,是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在汽車產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低功耗、低成本的要求,各種各樣的電子控制系統(tǒng)被開發(fā)了出來(lái)。由于這些系統(tǒng)之間通信所用的數(shù)據(jù)類型及對(duì)可靠性的要求不盡相同,由多條總線構(gòu)成的情況很多,線束的數(shù)量也隨之增加,CAN即是為了滿足現(xiàn)代汽車電子系統(tǒng)的苛刻要求而開發(fā)的。
然而,它在汽車以外的應(yīng)用領(lǐng)域中也逐漸顯示了出許多優(yōu)勢(shì)。例如,工業(yè)自動(dòng)化,傳感器(溫度、壓力和流量等)與調(diào)節(jié)器(電機(jī)和閥門等)及其控制器進(jìn)行互聯(lián),實(shí)現(xiàn)可靠的過程控制等等。
芯片簡(jiǎn)介
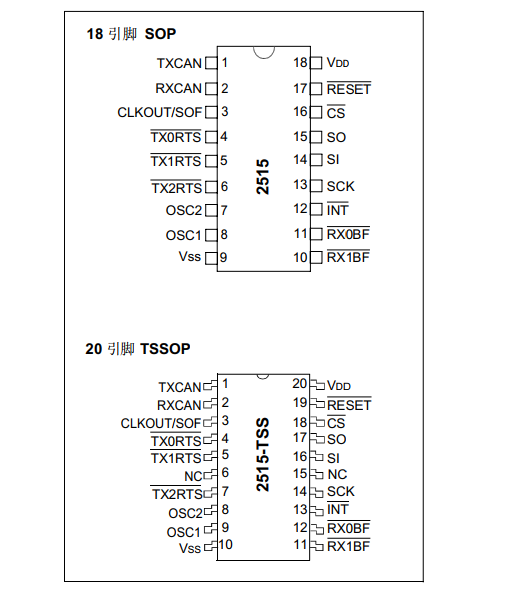
完全兼容MCP2515
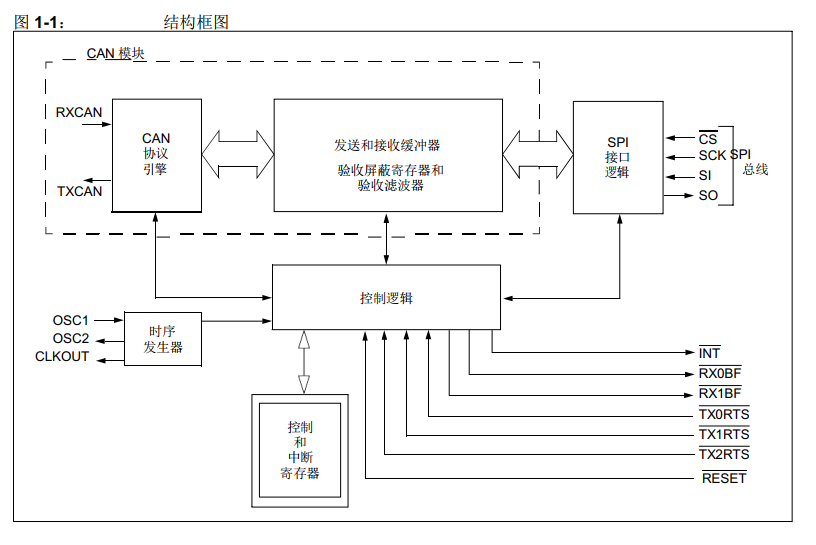
TH2515是一款獨(dú)立控制器局域網(wǎng)絡(luò)(Controller AreaNetwork, CAN)協(xié)議控制器,完全支持 CAN V2.0B技術(shù)規(guī)范。該器件能發(fā)送和接收標(biāo)準(zhǔn)和擴(kuò)展數(shù)據(jù)幀以及遠(yuǎn)程幀。TH2515自帶的兩個(gè)驗(yàn)收屏蔽寄存器和六個(gè)驗(yàn)收濾波寄存器可以過濾掉不想要的報(bào)文,因此減少了主單片 機(jī)(MCU)的開銷。TH2515與 MCU 的連接是通過業(yè)界標(biāo)準(zhǔn)串行外設(shè)接(Searial Peripheral Interface, SPI)來(lái)實(shí)現(xiàn)的。
? 低功耗的 CMOS 技術(shù):
- 工作電壓范圍 2.7V 至 5.5V
- 5 mA 典型工作電流 - 1 μA 典型待機(jī)電流 (休眠模式)
? 工作溫度范圍:- 溫 度 (℃):
-40°C 至 +85°C
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
相關(guān)推薦
如題,需要做rs422和rs232兼容輸出的電路,請(qǐng)問是否有可選輸出的芯片,或者完全pin2pin兼容的芯片?
發(fā)表于 12-10 06:31
MCP2518FD是一款在各行業(yè)中都有著廣泛應(yīng)用的CAN-FD控制器芯片,本文就將為大家介紹如何在飛凌嵌入式RK3562J開發(fā)板上適配MCP2518FD
![的頭像]() 發(fā)表于
發(fā)表于 12-07 14:22
?745次閱讀
電子發(fā)燒友網(wǎng)站提供《MCP2517FD小尺寸CAN FD控制器規(guī)格書.pdf》資料免費(fèi)下載
發(fā)表于 11-20 17:00
?0次下載
開源硬件平臺(tái),通過添加CAN總線模塊,也可以實(shí)現(xiàn)CAN通信。 硬件準(zhǔn)備 Arduino開發(fā)板 :可以選擇Arduino Uno、Mega等型號(hào)。 CAN總線模塊 :如MCP2515或
![的頭像]() 發(fā)表于
發(fā)表于 11-12 10:09
?736次閱讀
CAN簡(jiǎn)介:CAN 是控制器局域網(wǎng)絡(luò) Controller Area Network 的縮寫,是 ISO 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議,支持 CAN 協(xié)議 2.0A 和 2.0B。在 CAN
![的頭像]() 發(fā)表于
發(fā)表于 11-11 11:44
?394次閱讀

以下是一份通用的CAN芯片選型指南,旨在幫助工程師根據(jù)不同的應(yīng)用需求選擇合適的CAN芯片。主要從通信速率、IO電壓、耐壓、總線輸入阻抗、抗單粒子設(shè)計(jì)等方面進(jìn)行分析,下表是目前主流國(guó)內(nèi)外
![的頭像]() 發(fā)表于
發(fā)表于 10-18 14:17
?535次閱讀
選擇合適的CAN芯片對(duì)于確保系統(tǒng)性能至關(guān)重要。以下是一份通用的CAN芯片選型指南,旨在幫助工程師根據(jù)不同的應(yīng)用需求選擇合適的CAN
![的頭像]() 發(fā)表于
發(fā)表于 10-12 14:11
?487次閱讀
電子發(fā)燒友網(wǎng)站提供《BQ2515x安裝指南.pdf》資料免費(fèi)下載
發(fā)表于 09-26 11:44
?0次下載

電子發(fā)燒友網(wǎng)站提供《SIT2515帶SPI接口的獨(dú)立局域網(wǎng)(CAN)控制器中文手冊(cè).pdf》資料免費(fèi)下載
發(fā)表于 09-02 14:23
?0次下載
電子發(fā)燒友網(wǎng)站提供《MCP2515帶SPI接口的獨(dú)立CAN控制器數(shù)據(jù)手冊(cè).pdf》資料免費(fèi)下載
發(fā)表于 09-02 14:22
?2次下載
請(qǐng)問有符合ISO WD 11992-1標(biāo)準(zhǔn)的CAN芯片嗎
發(fā)表于 06-14 17:03
SPI配置如下: void SPI_Configuration(void)
{
SPI_InitTypeDefSPI_InitStructure;
SPI_I2S_DeInit(SPI1);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//設(shè)置SPI單向或者雙向的數(shù)據(jù)模式:SPI設(shè)置為雙線雙向全雙工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //設(shè)置SPI工作模式:設(shè)置為主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //設(shè)置SPI的數(shù)據(jù)大小:SPI發(fā)送接收8位幀結(jié)構(gòu)
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //串行同步時(shí)鐘的空閑狀態(tài)為低電平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//串行同步時(shí)鐘的第2個(gè)跳變沿(上升或下降)數(shù)據(jù)被采樣
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信號(hào)由硬件(NSS管腳)還是軟件(使用SSI位)管理:內(nèi)部NSS信號(hào)有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定義波特率預(yù)分頻的值:波特率預(yù)分頻值為256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;//指定數(shù)據(jù)傳輸從MSB位還是LSB位開始:數(shù)據(jù)傳輸從MSB位開始
SPI_InitStructure.SPI_CRCPolynomial = 7;//CRC值計(jì)算的多項(xiàng)式
SPI_Init(SPI1,SPI_InitStructure);//根據(jù)SPI_InitStruct中指定的參數(shù)初化外設(shè)SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外設(shè)
}GPIO也是復(fù)用模式
但是跟蹤發(fā)送SPIX->DR寄存器,發(fā)現(xiàn)不能對(duì)其進(jìn)行幅值,一直都是0XFE,這是為什么,收到的數(shù)據(jù)也是0XFE
求大神幫忙解決一下,困擾兩天了,在線等!
發(fā)表于 05-17 07:55
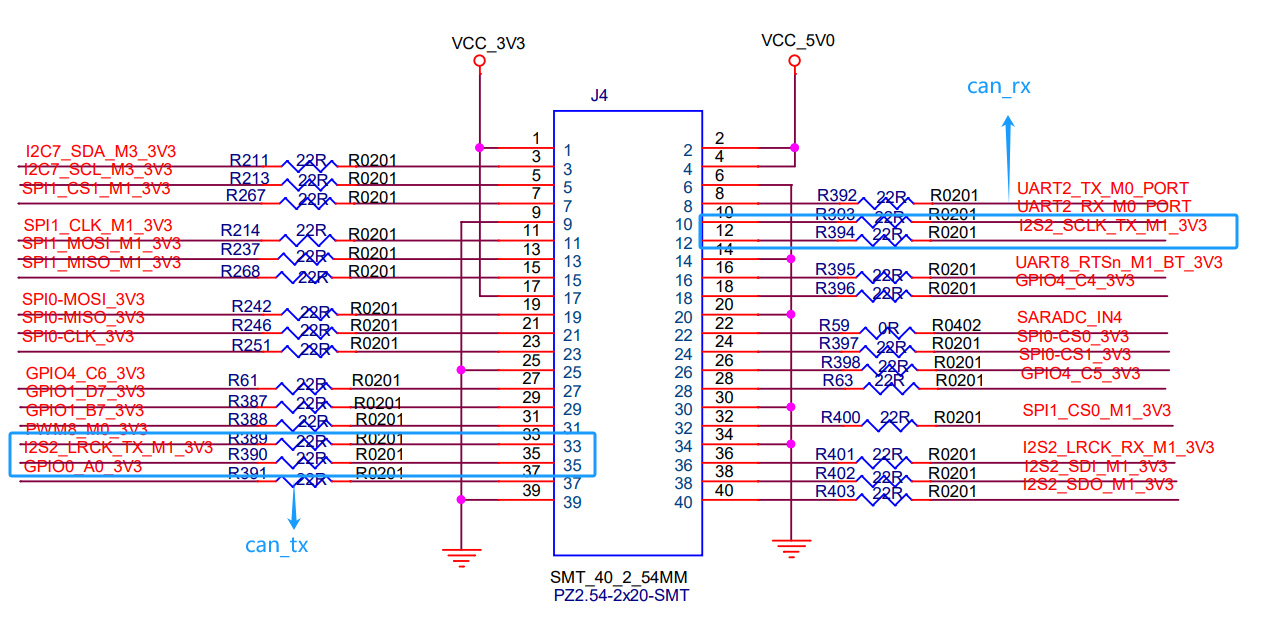
ArmSoM-Sige7中,CAN集成在40PIN中,可供用戶復(fù)用為CAN相關(guān)引腳。 2. 原理圖 CAN在40PIN中的位置:
![的頭像]() 發(fā)表于
發(fā)表于 02-29 16:52
?770次閱讀
MCP251X can驅(qū)動(dòng)移植nuc980 采樣用設(shè)備樹配置時(shí),中斷如何配置設(shè)備樹?
spi0: spi@b0061000 {
status = \"okay\"
發(fā)表于 01-17 06:43
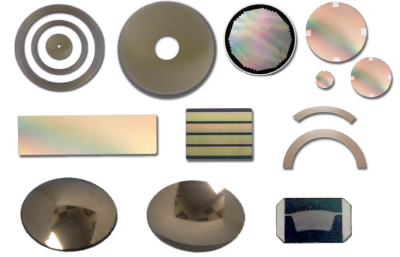
磁場(chǎng) 與普通光電倍增管(PMT)的使用相比,微通道板(Microchannel Plate,MCP)受到磁場(chǎng)的影響比較小。磁場(chǎng)對(duì)MCP使用影響的大小取決于磁場(chǎng)與MCP通道軸之間的方向。圖1顯示了
![的頭像]() 發(fā)表于
發(fā)表于 12-26 06:43
?773次閱讀
") 什么是CAN? Pin MCP2515 芯片
什么是CAN? Pin MCP2515 芯片





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論