 智能化紅外焦平面應用前景與發展現狀綜述
智能化紅外焦平面應用前景與發展現狀綜述
智能化紅外焦平面探測器的出現,依賴于先進的紅外材料、器件技術和工藝水平以及集成電路技術和工藝的飛速發展;其能夠針對不同的場景對探測器的工作狀態進行自適應調整,而且在探測器上能夠實現部分信號處理功能。智能化紅外探測器的出現,大大提高了紅外系統的靈活性,同時為日益復雜的探測場景提供了更加精準的探測能力。
據麥姆斯咨詢報道,近期,中電科光電科技有限公司的科研團隊在《激光與紅外》期刊上發表了以“智能化紅外焦平面應用前景與發展現狀”為主題的文章。該文章第一作者為袁媛。
本文從智能化紅外探測器應用的背景需求作為切入點,闡明發展智能化探測器的必要性;最后介紹了智能化紅外探測器發展狀況及未來發展趨勢。
智能化紅外焦平面發展的背景需求
智能化紅外系統是用紅外傳感器代替人的眼睛,用專用高速微型計算機模擬人的分析、推理、判斷、決策等邏輯功能,用“算法”復制人的思維過程。而智能化紅外傳感器在“看”的同時,也要對看到信息作出判斷和反饋,從而替代高速微型計算機完成思維過程。
在現代軍事應用中,為實現紅外系統高集成度小型化,需要進一步降低系統的體積、重量、功耗等;同時,為了使后端成像系統更加簡化,部分成像算法需要在探測器內部實現;以上兩個應用成為智能化紅外焦平面技術發展的動力。根據實際應用背景,智能化紅外焦平面需要突破一系列關鍵技術,從而使紅外系統變得更緊湊,具備靈活機動性、大大提高了可靠性。如圖1所示為智能化紅外探測器概念示意圖。
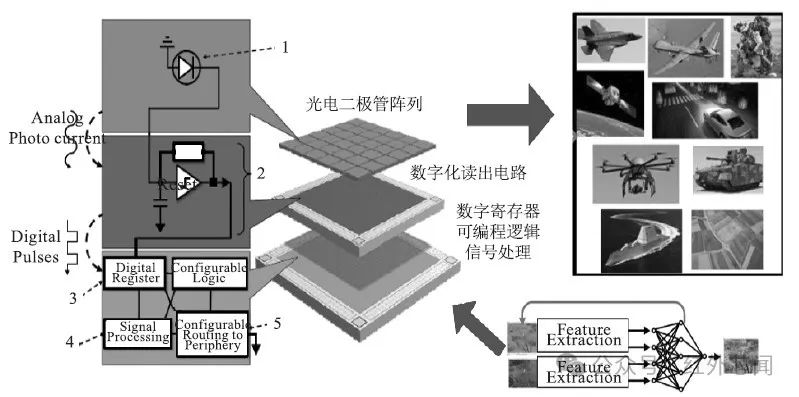
圖1 智能化紅外探測器概念示意圖
紅外遙感應用需求
紅外遙感中在對區域目標進行成像時,探測器的視場角和像素數量限制了衛星單次觀測的信息量,成像系統單次獲取的信息無法形成完整視場圖像,因此需要采用紅外圖像拼接技術將多次觀測獲取的不同圖像拼接到一起,從而獲得探測區域的完整信息。
紅外遙感圖像拼接的原理是將多張紅外遙感圖像重疊的區域進行特征點提取、描達,最終通過圖像融合拼接成一張圖像。其中,圖像特征匹配(特征點提取、描述)是紅外遙感圖像拼接至關重要的一步,該過程的數據會對圖像質量的高低與獲取圖像時間的長短產生重要影響。為了使各圖像重疊區域的特征能夠精確匹配,需要對探測器采集的多張原始圖像進行圖像預處理,保證拼接過程中對圖像特征點的抓取淮確度以及特征點匹配精度不受原始圖像質量影響。
紅外成像電路從探測器杜瓦接口處獲得的電信號往往會受到杜瓦內部排線的干擾,從而在讀出電路輸出電信號上疊加了噪聲,特別是對于航天遙感應用的大面陣、長線列拼接探測器;另外,在傳統的模擬域讀出電路內部,探測器積分信號在讀出電路內部傳輸鏈路上也易受到干擾,使探測器信噪比降低。這就使得紅外遙感原始圖像的信噪比、對比度和像素分辨率都處于較低水平,圖像的邊緣信息模糊不夠銳利,后端成像系統很難直接從圖像中獲得足夠精準的信息,因此需要對原始圖像進行圖像增強預處理。為了簡化圖像拼接過程,縮短圖像拼接時間,希望將圖像增強及降噪預處理放在探測器內實現,通過簡單的時間、空間濾波等算法,獲得高信噪比、高對比度的原始圖像。
圖像預處理的另一個目的就是在探測器片外進行盲元替換。紅外探測器存在盲元,其反應在圖像上是分布在圖像中的一些無規律的白點或者黑點,若對地遙感成像時各張圖像中重復的位置落在盲元上,那么當對圖像進行相關的配準時,會由于盲元的存在而造成對特征點抓取困難,從而導致匹配準確率下降。在成像系統中對遙感原始圖像的盲元替代工作量非常大,若探測器能夠在成像過程中,實時檢測盲元,并對盲元進行補償,那么將大大減輕圖像預處理的數據量;在紅外探測器內部實現實時盲元檢測和補償的另一個好處,是可以避免探測器在使用中產生地面無法獲得的臨時盲元信息,從而無法進行地面盲元補償,降低各張圖像間的匹配準確率。
紅外制導應用需求
為了更好地適應未來信息化電子戰環境,紅外導引頭作為紅外精確制導武器系統的核心,需要具備更強的紅外探測能力、更快的圖像實時處理速度和更敏銳的電子感知能力。其中,紅外成像探測技術、圖像實時處理技術等均是現階段各個國家圍繞提高制導武器系統智能化水平和抗干擾能力的重點發展方向。
紅外成像探測技術
隨著新型紅外干擾技術的日益發展,紅外成像探測技術所面臨的目標信息、環境狀態和任務使命均更加復雜化多樣化。這就要求紅外探測器具備大視場、高分辨率的大規格、小尺寸像元特征;而且為了有效降低數據壓縮、特征提取以及數據鏈傳輸的復雜性,紅外探測器需要具備智能焦平面陣列的全數字化信息處理能力。
此外,紅外成像探測維度日趨豐富,目標探測、跟蹤與識別的信號空間逐漸地由低維度向高維度演化,其表現為信號輸入維度和處理維度呈逐步增加的趨勢,這就引起了較高光譜分辨率和探測低特征目標所需要的探測靈敏度的矛盾。為了解決這一矛盾,需要紅外探測器能夠動態感知目標場景,并根據目標場景變化具備實現動態開窗、局部像元重構等能力,結合片內數據信號壓縮感知算法(利用適度規格紅外焦平面陣列獲得的高分辨率圖像),在不影響高分辨率的同時提高低特征目標的靈敏度。
圖像實時處理技術
在紅外制導系統中,圖像實時處理技術是對來自紅外成像探測系統信號進行分析與甄別,并對目標信號中的背景噪聲和紅外誘餌干擾進行撇除,提取真實的目標信號,進而計算目標位置和命中點。一般包括紅外圖像預處理、紅外圖像實時檢測、目標圖像實時跟蹤三類關鍵技術。其中,目標圖像實時跟蹤是紅外導引頭圖像實時處理的關鍵技術之一,現階段實現高精度目標跟蹤的算法已經獲得重大突破,但仍亟待解決的是算法運算量和存儲空間的需求增加,造成實時跟蹤上的困難,這就對紅外探測器智能化提出了要求。希望通過在紅外焦平面讀出電路上完成時間濾波、空間濾波、圖像穩定等算法,將圖像噪聲、背景抑制等預處理功能放在探測器內部完成,片外釋放出的數據存儲空間可以更多的被目標圖像實時跟蹤技術利用;另外,在片上增加運動檢測、目標軌跡識別等圖像實時檢測功能,可以大大降低紅外探測器數據吞吐量,從而降低目標圖像實時跟蹤算法運算量以及信號空間存儲量。
智能化紅外焦平面研制進展
21世紀初期,由軍事需求做牽引,美國、法國、英國等西方技術發達國家提出了紅外焦平面智能化概念,意圖簡化外部信息處理,提高搜索速度和態勢感知速度,減小體積、質量,降低功耗和成本,提高可靠性。
從傳統的被動接收光電信號并將其轉化為模擬域電壓信號,到對接收的光電信號進行數字域信號轉化、片上信號處理功能、自主分析反饋,最后達到自主學習能力,智能化焦平面的發展不是一蹴而就的,其發展需通過技術不斷積累創新,也需要其他新興技術的支持。
智能化紅外焦平面基礎階段———數字像元焦平面
數字像元焦平面技術是實現智能化紅外焦平面的技術基礎,焦平面各光電二極管獲得的所有光電信號在讀出電路上都被轉換為數字格式,利用數字域信號處理的靈活性,在芯片級完成多種復雜的計算、控制等功能。因此,紅外數字像元焦平面是智能化紅外焦平面的初期階段。
法國sofradir公司聯合CEA-LETI研制出的幾款數字像元探測器在探測靈敏度、動態范圍等性能方面具備較高水平。土耳其自然科學工程院在兩步量化技術上也頗有研究,2015年,其報道了陣列規模32×32,中心間距30 μm兩級量化數字化焦平面樣品及測試結果。圖2為像素級數字化結合TDI功能讀出電路的結構圖。
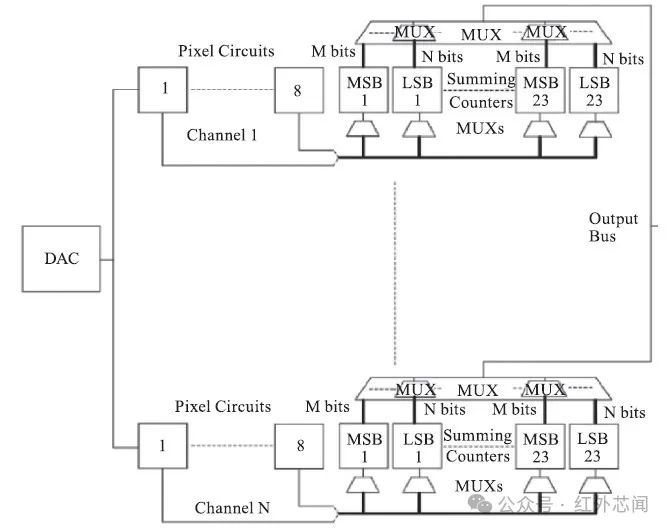
圖2 像素級數字化結合TDI功能讀出電路結構圖
目前,國內已具備數字像元焦平面探測器制備能力,多家致力于紅外焦平面研制的單位均已開展對數字像元焦平面的研制,并有相應樣品報道。雖然已具備開展智能化紅外焦平面的基礎,但是受限于技術水平及CMOS工藝水平等,我國智能化紅外焦平面樣品問世還需要一段時間。
智能化紅外焦平面初級階段———被動式片上信號處理功能
在數字像元焦平面技術基礎上,利用光電信號轉換后的數字域信號為實現片上信號處理提供能了可能。
可變空間分辨率技術可以看做最早在焦平面內實現的片上信號處理功能。在美國空軍研究實驗室的贊助下,美國Nova Biomimietcs公司研制出一款像素陣列320×256,通過像元重構獲得具有分辨率幀速率可變功能的紅外焦乎面。這種器件通過片外程控,用戶以幀速率調整陣列元空間分布,像元的空間組態可以依據用戶需求調整出各種組合狀態。像元空間分布窗口的中心可在整個焦平面陣列內移動,從而獲實現探測目標的高精度跟蹤。這種片上可變空間分辦率技術,對于所關心的探測目標在空間維度上能夠達到最優的空間分辨率,同時將不在探測關心范圍內的背景像元利用更大超像元模式輸出實現高幀頻,這就使探測器在超寬的視場中具各最優的分辦率,圖3展示了探測器不同像元空間組態及讀出狀態特征。此技術唯一的缺點是需要用戶在探測器外部進行程控,探測器不具備自適應能力。
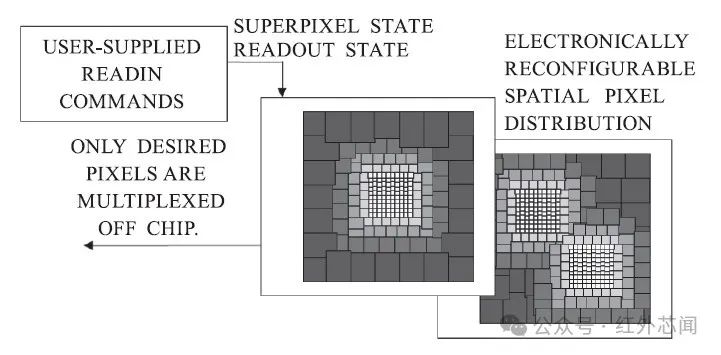
圖3 不同像元空間組態及讀出狀態特征
美國麻省理工林肯實驗室,一直致力于開發數字智能化焦平面陣列讀出電路。2006年,研制出的第一款數字像元焦平面探測器就利用信號在正交的四個方向上進行數據傳輸并與像素內計算相結合,實現背景減除和空間濾波功能,該探測器陣列規模256×256,像元中心間距30 μm,讀出電路采用90 nm CMOS工藝,圖4展示了信號正交傳輸數字像元讀出電路原理圖。
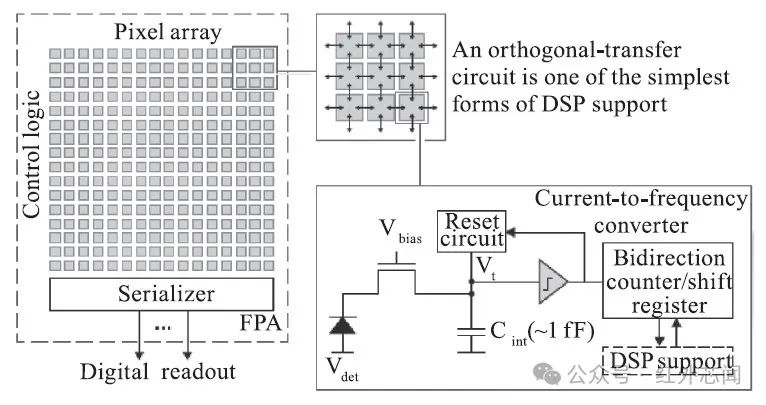
圖4 信號正交傳輸數字像元讀出電路原理圖
隨后幾年,林肯實驗室以相同陣列規模探測器作為典型產品,通過片上功能算法開發、像素級ADC優化,至2014年,采用更小CMOS線寬65 nm工藝,使得讀出電路片上集成的功能達到頂峰。其通過像素內雙向計數ADC使探測器獲得對變化場景實時探測及背景減除的能力;通過正交傳輸架構,在獲取圖像時將圖像與預定義的濾波核進行卷積,這就可以在片內實現對二維圖像數據進行低通濾波、高通濾波、紋理濾波,而不需要額外的成像處理系統對圖像進行過濾,進而實現了片上圖像穩定處理、非均勻性校正、盲元替換、圖像時間空間濾波、圖像鎖定和放大等功能,圖5為采用不同圖像濾波算法得到的成像圖;通過像素內增益轉換,使得讀出電路可以匹配從短波到甚長波紅外焦平面的應用。雖然實現了多種片上信號處理功能,但是這些功能都是通過片外觸發的,距離自適應智能化焦平面還有差距。未來,他們規劃將焦平面規模擴展到4028×4028規模,像元間距縮小到12 μm以下,采用≤32 nm CMOS線寬工藝,重點是要在像素內實現閾值比較邏輯計算,初步實現焦平面自適應能力。
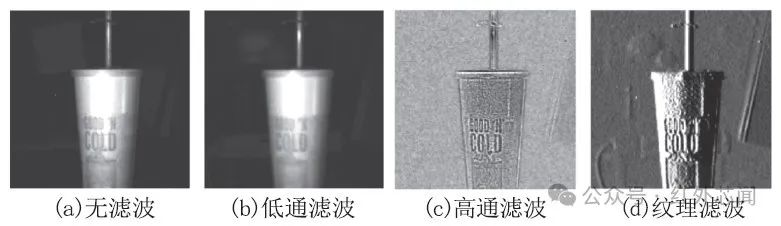
圖5 不同圖像濾波算法成像圖
美國Senseeker Engineering公司,在2021年報道了一款數字化高動態紅外成像儀,利用數字化焦平面技術實現幀內高動態成像,替代傳統的采用多幀圖像組合的幀間高動態成像,大大提高了時間分辨率,并且解決了運動目標成像模糊的問題。該高動態紅外成像儀規模為1280×720,幀內高動態成像是通過不同的積分時間對相鄰像素進行空間插值來獲得的,圖6給出了不同時間交替積分的2×2像素棋盤陣列,實際電路中時間交替集成陣列規模可以根據不同應用場景在外部程序控制下擴展到任意規模,圖7展示了在同一場景下不同積分模式下得到的幀圖像。實現在不影響時間分辨率的情況下動態范圍提升了57 dB,并且基本保持了空間分辨率。不難看出,這種像素棋盤陣列的長短時間交替積分功能,在探測器內部利用較少的資源實現片上圖像處理功能。
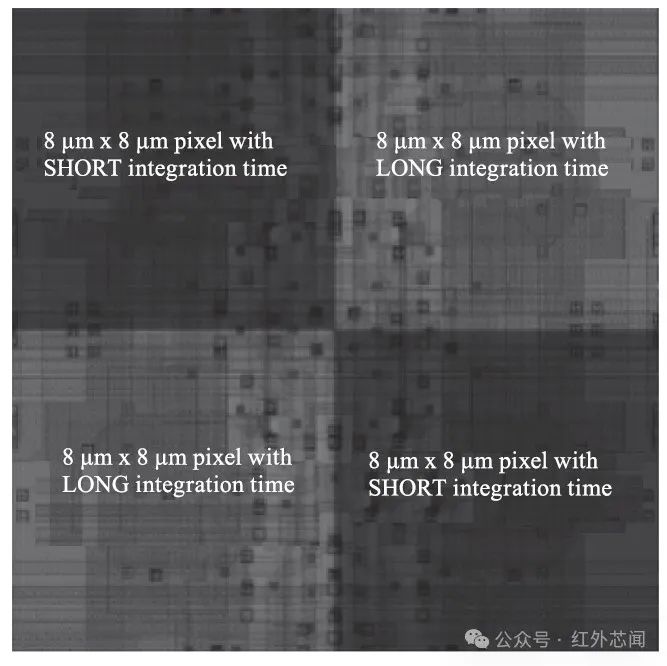
圖6 不同時間交替積分2×2像素棋盤陣列
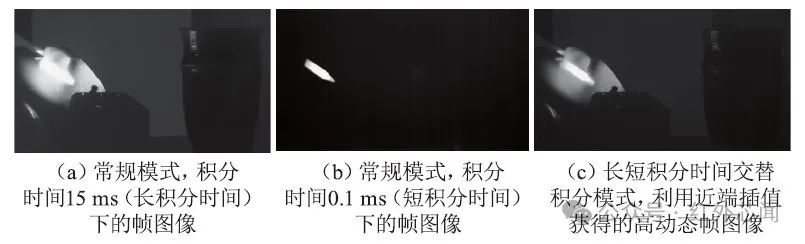
圖7 同一場景的不同積分模式下幀圖像
英國航空航天系統公司(BAE)公司在智能化紅外焦平面研制方面也頗有成就,其采用三維垂直集成技術(如圖8所示),將焦平面、專用集成電路芯片、動態存儲器陣列芯片通過垂直互連從而能夠在探測器內部實現高級圖像處理。雖然該焦平面為非制冷型,但三維垂直集成技術的出現,為焦平面智能化提供了更多的可能性。
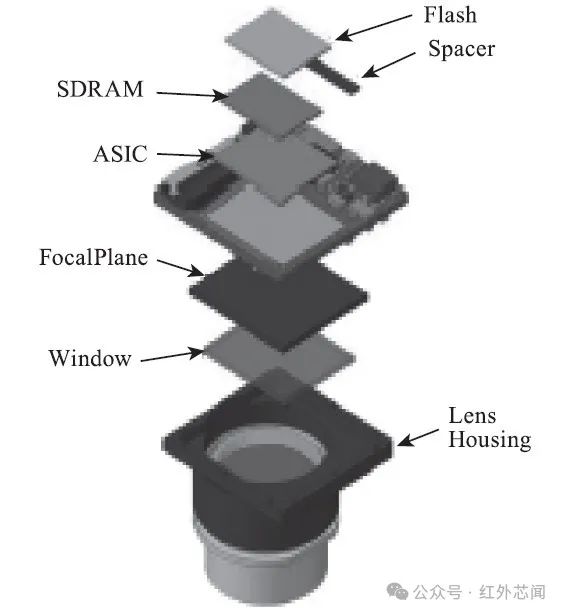
圖8 采用三維垂直集成技術的智能化焦平面架構
雖然目前單片集成像素探測感知、信號計算、圖像處理能力的紅外焦平面已經被成功研制,但是仍然采用“先感知、后計算處理”以及外部程控的方式,距離完全智能化還有一定差距。
智能化紅外焦平面高級階段———自適應能力及自主學習能力
智能化紅外焦平面的終極目標,是實現能夠對不同場景、探測目標的實時變化通過調整參數配置,自動收集最相關數據的自適應能力;以及對收集到最有價值的信息進行自主學習判別、在復雜情況下自動決策的能力。
美國國防高級計劃研究局(DARPA)于2016年提出了“可重構成像(Reimagine)”項目,核心目標是研制智能化的成像探測器。項目中提出了具有內部反饋成像系統的創新概念,該項目重點將開發自適應學習的學習算法,并將開發出的創新概念在不同硬件層實現;利用集成電路的三維垂直集成技術,可以選擇不同類型探測器芯片與像素ADC讀出電路、適合成像探測器操作目的的硬件層進行互連,從而針對不同應用需求“重構“成像系統(如圖9所示)。
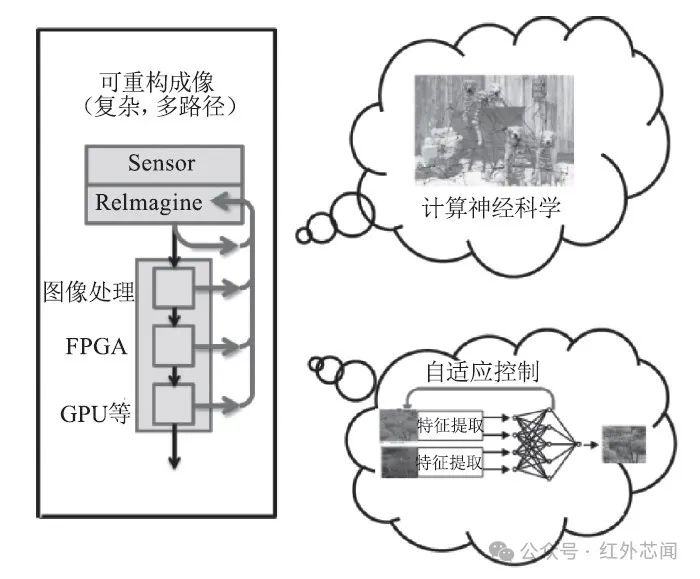
圖9 “可重構成像”實現邏輯圖
該項目將開發的可重構集成電路試圖打破每像素固定資源的傳統模式,取而代之的是提供大量的數字邏輯資源和可重構路由通道,這些路由通道可以根據需要使用與FPGA相同的編程技術分配給像素。這些算法能夠根據場景的背景和各種數據的預測值將信息內容最大化并做出決策。
2017年,DARPA同時授予DRS網絡和成像系統公司、沃克特爾公司(Voxtel)、英國航空航天系統公司(BAE)電子系統部門和洛馬公司(LM)導航和火控部門“可重構多功能成像傳感器”合同,計劃用時45個月,完成該項目的研制工作。可以預見“可重構多功能成像傳感器”若成功研制,即將在全球范圍內掀起自適應能力及自主學習能力智能化紅外焦平面的熱潮。
總結與展望
以紅外制導、紅外遙感等應用需求作為牽引,數字像元焦平面技術作為技術基礎,智能化紅外焦平面的研究已經取得了階段性的發展,已經獲得具備圖像穩定處理、非均勻性校正、盲元替換、圖像時間空間濾波等片上信號處理功能的初級智能化焦平面探測器樣品,其在一定程度上減小傳感器帶寬和傳感器接口數據吞吐量,簡化了片外圖像信息處理系統硬件條件。對于自適應能力和自主學習能力的智能化需求,更高一級的智能化紅外焦平面也正在開發中。
未來,紅外焦平面傳感器的形態會更加多元化。隨著各學科技術的發展,學科間的壁壘將不斷被打破,將基于仿生學、新一代人工智能技術、以及先進的制造技術等多學科與紅外焦平面技術相融合,將計算處理融入傳感器視覺信息感知過程,實現感知和處理“一體化”的智能型紅外焦平面。
審核編輯:劉清
-
信號處理
+關注
關注
48文章
1026瀏覽量
103259 -
紅外探測器
+關注
關注
5文章
289瀏覽量
18072 -
紅外傳感器
+關注
關注
9文章
519瀏覽量
47559 -
電信號
+關注
關注
1文章
817瀏覽量
20564
原文標題:綜述:智能化紅外焦平面應用前景與發展現狀
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
醫療機器人發展現狀與趨勢
變阻器的未來發展趨勢和前景如何?是否有替代品出現?
工控機廠家發展現狀及未來趨勢

達實從事智能化行業30年心路歷程
壓力開關發展現狀:智能化與高精度的新時代

國產光電耦合器:2024年的發展現狀與未來前景

紅外測溫傳感器:家電智能化的新寵

梯云物聯|全球及中國智能電梯市場:蓬勃現狀與廣闊前景
嵌入式系統發展前景?
萬兆電口模塊的產業發展現狀與前景展望
比亞迪發布新能源汽車智能化發展全新戰略
乘用車一體化電池的發展現狀和未來趨勢






 工商網監
工商網監
評論