") 差分編碼器信號(hào)如何接plc
差分編碼器信號(hào)如何接plc
差分編碼器信號(hào)通常用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置,接收差分編碼器信號(hào)的PLC(可編程邏輯控制器)需要進(jìn)行相應(yīng)的信號(hào)處理才能正確讀取并理解編碼器的輸出。下面是將差分編碼器信號(hào)接入PLC的一般步驟:
1. 連接差分編碼器信號(hào)線:
差分編碼器通常會(huì)有A相、B相和Z相等多個(gè)信號(hào)線用來(lái)輸出位置信息。將編碼器的A、B、Z相信號(hào)分別連接到PLC的對(duì)應(yīng)輸入端口。
2. 配置PLC輸入端口:
在PLC的編程軟件中,配置輸入端口以接收差分編碼器信號(hào)。需要指定每個(gè)輸入端口對(duì)應(yīng)的信號(hào)類(lèi)型(脈沖信號(hào)或方向信號(hào)等)以及工作方式(上升沿觸發(fā)或下降沿觸發(fā)等)。
3. 編寫(xiě)PLC程序:
在PLC的編程軟件中編寫(xiě)程序,以處理差分編碼器信號(hào)。根據(jù)編碼器的輸出信號(hào)類(lèi)型和工作方式,編寫(xiě)邏輯以正確讀取并解析編碼器的信號(hào)。
4. 信號(hào)處理:
接收差分編碼器信號(hào)后,PLC通常需要進(jìn)行信號(hào)處理,包括計(jì)數(shù)、方向識(shí)別、位置跟蹤等操作,以實(shí)現(xiàn)對(duì)位置信息的準(zhǔn)確獲取。
5. 反饋控制:
在某些應(yīng)用中,PLC還可以根據(jù)差分編碼器信號(hào)的反饋信息實(shí)現(xiàn)位置控制或運(yùn)動(dòng)控制。編寫(xiě)相應(yīng)的邏輯算法,實(shí)現(xiàn)對(duì)機(jī)器或設(shè)備的位置、速度控制等功能。
通過(guò)以上步驟,PLC可以正確接收、處理和利用差分編碼器信號(hào),實(shí)現(xiàn)對(duì)位置信息的準(zhǔn)確獲取和控制。在實(shí)際應(yīng)用中,根據(jù)具體的差分編碼器規(guī)格和PLC型號(hào),可能會(huì)有細(xì)微的差異,需要根據(jù)具體情況進(jìn)行相應(yīng)的設(shè)置和處理。
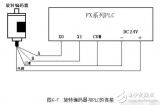
差分編碼器接線原理
差分編碼器(Differential Encoder)是一種用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置的傳感器,它通過(guò)輸出兩路相位差為90度的脈沖信號(hào)來(lái)反映位置的變化。接下來(lái)我將介紹差分編碼器的接線原理:
差分編碼器通常有三個(gè)信號(hào)線:A 相信號(hào)線、B 相信號(hào)線和 Z 相信號(hào)線。其中,A 相和 B 相信號(hào)線是兩路相位差為90度的正交信號(hào),用于確定運(yùn)動(dòng)的方向和速度;Z 相信號(hào)線用于標(biāo)記一個(gè)完整的運(yùn)動(dòng)周期,即位置的絕對(duì)值。
接線原理如下:
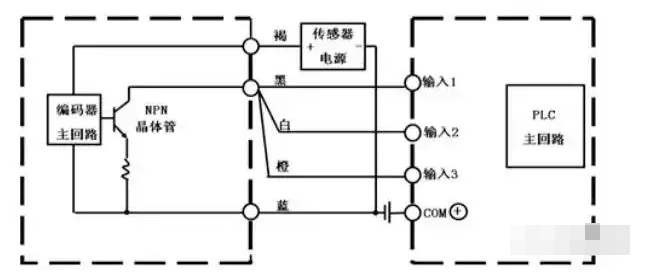
1. A 相和 B 相信號(hào)線接線:
- A 相信號(hào)線和 B 相信號(hào)線通常是差分編碼器的主要輸出信號(hào),表示運(yùn)動(dòng)的相位和速度信息。
- 將 A 相信號(hào)線接到 PLC 或運(yùn)動(dòng)控制器的一個(gè)數(shù)字輸入端口,將 B 相信號(hào)線接到另一個(gè)數(shù)字輸入端口。
2. Z 相信號(hào)線接線:
- Z 相信號(hào)線通常用于標(biāo)記一個(gè)完整的運(yùn)動(dòng)周期,用于確定位置的絕對(duì)值。
- 將 Z 相信號(hào)線接到 PLC 或運(yùn)動(dòng)控制器的一個(gè)數(shù)字輸入端口。
3. 接地線連接:
- 差分編碼器通常也需要接地線來(lái)確保信號(hào)的準(zhǔn)確性和穩(wěn)定性。
- 將編碼器的接地線連接到 PLC 或控制器的接地端口。
4. 信號(hào)處理:
- PLC 或運(yùn)動(dòng)控制器需要進(jìn)行對(duì)接收到的差分編碼器信號(hào)進(jìn)行適當(dāng)?shù)奶幚恚ㄐ盘?hào)濾波、計(jì)數(shù)、方向識(shí)別等操作,以獲取準(zhǔn)確的位置和速度信息。
通過(guò)以上接線原理,差分編碼器可以將位置和運(yùn)動(dòng)信息準(zhǔn)確地傳輸給 PLC 或運(yùn)動(dòng)控制器,實(shí)現(xiàn)對(duì)運(yùn)動(dòng)系統(tǒng)的監(jiān)控和控制。接線前,請(qǐng)確保正確理解差分編碼器的信號(hào)類(lèi)型和編碼原理,以便正確連接和信號(hào)處理。
差分編碼器與編碼器的區(qū)別
差分編碼器(Differential Encoder)和普通編碼器(Incremental Encoder)是兩種常見(jiàn)的位置傳感器,用于測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)或線性位置。它們?cè)谠怼⑤敵龇绞胶蛻?yīng)用方面存在一些區(qū)別。
以下是差分編碼器和編碼器的主要區(qū)別:
1. 輸出信號(hào)差異:
- 差分編碼器輸出的是差分信號(hào),通常具有兩個(gè)相位差為90度的信號(hào),分別稱為A相和B相。這兩個(gè)信號(hào)相對(duì)于彼此的相對(duì)相位差可以表示位置的方向和速度。
- 編碼器通常輸出的是脈沖信號(hào),根據(jù)所選的編碼方式(例如,二進(jìn)制或格雷碼),編碼器可以提供不同的脈沖組合來(lái)表示位置的變化。
2. 位置信息表示:
- 差分編碼器通常只提供相對(duì)位置的信息,通過(guò)計(jì)算脈沖數(shù)量和方向來(lái)估算位置。差分編碼器通常需要配合起始位置的標(biāo)記信號(hào)(通常通過(guò)Z相信號(hào)實(shí)現(xiàn))來(lái)確定位置的絕對(duì)值。
- 編碼器可以提供相對(duì)位置和絕對(duì)位置的信息。某些編碼器(如絕對(duì)光柵編碼器)通過(guò)具有固定位置的獨(dú)特編碼模式來(lái)提供精確的絕對(duì)位置信息,而非只提供相對(duì)變化。
3. 應(yīng)用領(lǐng)域:
- 差分編碼器常用于某些控制系統(tǒng),如步進(jìn)電機(jī)驅(qū)動(dòng)器,其中需要準(zhǔn)確的速度和方向信息。
- 編碼器在許多不同領(lǐng)域中得到廣泛應(yīng)用,例如自動(dòng)化機(jī)械、機(jī)器人、車(chē)輛導(dǎo)航和位置跟蹤等。
4. 誤差消除:
- 差分編碼器的差分信號(hào)相對(duì)于共模干擾更抗干擾能力強(qiáng),對(duì)于干擾信號(hào)的排斥能力更好,從而提供了更高的信號(hào)可靠性。
- 編碼器對(duì)于共模干擾方面可能較為敏感,可能需要額外的信號(hào)處理手段(如濾波)以消除噪聲對(duì)信號(hào)的影響。
差分編碼器通常用于需要準(zhǔn)確的方向和速度信息的控制系統(tǒng),而編碼器則更常見(jiàn),并且在許多不同的領(lǐng)域中得到廣泛應(yīng)用,提供相對(duì)位置和/或絕對(duì)位置的信息。
審核編輯:黃飛
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753077 -
編碼器
+關(guān)注
關(guān)注
45文章
3638瀏覽量
134426 -
plc
+關(guān)注
關(guān)注
5010文章
13271瀏覽量
463057 -
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
401瀏覽量
24704 -
信號(hào)處理
+關(guān)注
關(guān)注
48文章
1026瀏覽量
103259
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
求推薦一款處理24V的差分編碼器信號(hào)的芯片
2812如何接受差分編碼器的信號(hào)?電路如何設(shè)計(jì)?
編碼器類(lèi)型
編碼器與PLC連接及應(yīng)用

編碼器與plc的接線圖
旋轉(zhuǎn)編碼器與PLC連接的方法
伺服編碼器差分12V轉(zhuǎn)24V電平方波脈沖信號(hào)變送器的應(yīng)用
5V編碼器差分信號(hào)轉(zhuǎn)5V脈沖或集電極開(kāi)路信號(hào)變送器
差分編碼器轉(zhuǎn)脈沖信號(hào)變送器的主要特性
如何把NPN或PNP信號(hào)轉(zhuǎn)換為差分單端脈沖信號(hào)輸出
差分信號(hào)轉(zhuǎn)單端NPN或PNP,差分編碼器光柵尺PLC采集 WJ852

編碼器差分信號(hào)轉(zhuǎn)脈沖信號(hào)隔離變送器(脈沖信號(hào)轉(zhuǎn)換器)
差分編碼器信號(hào)如何接plc?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論