 機器視覺運動控制一體機在光伏匯流焊機器人系統的解決方案
機器視覺運動控制一體機在光伏匯流焊機器人系統的解決方案
一、市場應用背景
匯流焊是光伏太陽能電池板中段加工工藝,其前道工序為串焊,在此環節流程中,需要在多個太陽能電池片表面以平行方式串焊多條焊帶,形成電池串。串焊好的多組電池串被有序排列輸送到匯流焊接工作臺,通過機器視覺對電池串進行整版定位糾偏操作,保證焊接的準確性。
隨后,通過焊接帶(匯流帶)將這些電池串相互連接,在這步驟中,焊槍分別在電池串兩側延伸末端的方向進行焊接,實現電池串之間的電流匯集,形成完整的太陽能電池組件。
最后,這些組件將被轉移到下一工序進行層壓、邊框安裝、接線盒安裝等封裝處理,最終形成耐用、安全、便于安裝使用的完整太陽能電池板。
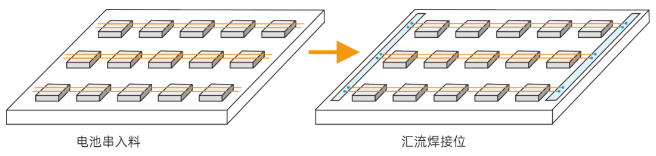
匯流焊接
1、人工匯流焊存在的問題:
傳統的人工匯流焊方案常面臨生產效率低下、良率不穩定、焊接質量波動大及靈活性受限等問題,最終不僅影響產品性能和可靠性,還增加生產成本,制約生產規模的擴展。
2、正運動技術解決方案:
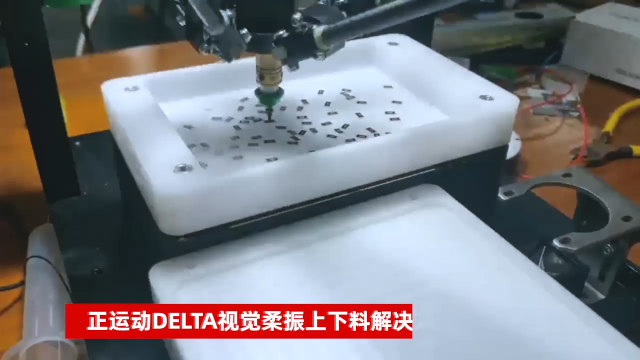
正運動針對這一市場需求,特此開發了基于VPLC711視覺運動控制一體機結合SCARA機械手+機器視覺的電池片匯流焊解決方案。
可解決不同角度來料、規格等光伏太陽能電池板的串焊需求,實現生產效率和精度等大幅提升,同時將廢品率降至僅12%,并顯著加快數據處理速度,提高了生產線的柔性和自動化水平。
此外,我們的解決方案通過降低廢品率有效減少能源消耗,助力實現環保和可持續發展目標。借助我們高度集成的硬件和易用的RTFuse機器人系統平臺,讓客戶享受到快速的投資回報,真正實現高效、環保的智能制造。

正運動技術解決方案
二、基于VPLC711的機器人系統在光伏匯流焊的應用
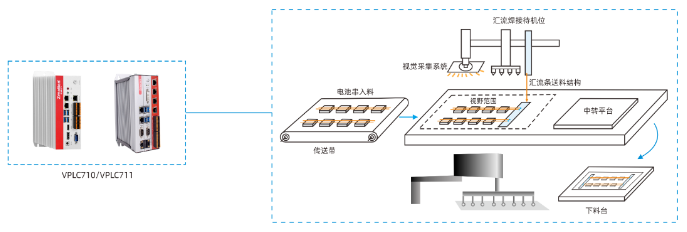
基于VPLC711的機器人系統在光伏匯流焊加工示意圖
1、傳統匯流焊解決方案痛點
傳統的解決方案包含機械手驅控、PLC、視覺工控機、顯示器、觸摸屏等組件,硬件成本高,開發周期長,功能整合度低,軟硬集成度不高,數據交互速率不達期等問題。

傳統匯流焊解決方案痛點
2、正運動匯流焊解決方案設計
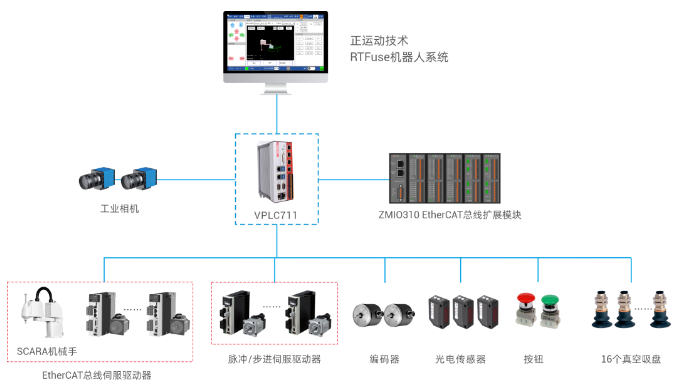
正運動匯流焊解決方案設計
●20DO:接真空吸盤,高速輸出口接工業相機的硬觸發輸入;
●EtherCAT接口:接EtherCAT總線驅動器,控制SCRAR機械手、拉焊帶軸、焊接軸和其它軸運動;
●4路單端脈沖輸出:接步進/脈沖驅動器,控制焊帶卷軸和傳送帶;
●EtherNET接口:千兆網口,接支持Gige協議的面陣相機,實現視覺定位、糾偏應用。
3、VPLC711機器視覺運動控制一體機
VPLC711是一款基于x86平臺和Windows操作系統的高性能機器視覺EtherCAT運動控制器,可脫機運行,支持豐富的視覺和運動控制功能,大幅簡化視覺與運動控制項目的配置流程。
同時內置了運動控制實時內核MotionRT7,形成一種開放式IPC形態實時軟控制器/軟PLC,為用戶提供靈活集成的運動控制+視覺一體化解決方案。
VPLC系列機器視覺運動控制一體機的安裝與拆卸過程便捷,占地空間小,還能與其它控制單元部件(如伺服驅動器、傳感器、編碼器、控制閥等)無縫集成,提供一個完整端到端的視覺運動控制解決方案。
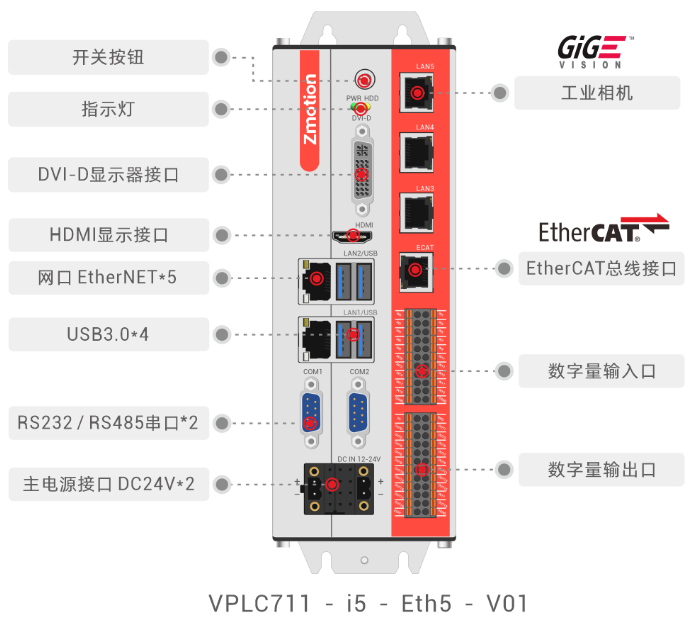
VPLC711硬件接口
●可選6-64軸運動控制(脈沖+EtherCAT總線);
●內置實時內核MotionRT7,支持第三方視覺軟件;
●板載20路通用輸入(其中10路為高速輸入),20路高速輸出;
●多核并行運算,能夠高效處理運動控制,機器視覺等自動化設備核心任務;
●開放式IPC形態實時軟控制器/軟PLC,可靈活集成運動控制+視覺一體化解決方案。
4、解決方案硬件配置

解決方案硬件配置
5、運動控制與機器視覺實現過程
(1)機器視覺
在光伏匯流焊的自動化焊接過程中,機器視覺系統首先通過模板匹配進行粗定位,然后利用雙直線測量確定電池片的角點位置,并計算中點實現精準定位,精度可達到客戶需求。
SCARA機械手根據機器視覺系統提供的偏移量進行糾偏,便于電池串到達加工區域,專用的長焊頭分別在電池串兩側延伸末端的預設焊點精準下壓,完成高速且高精度的焊接作業。
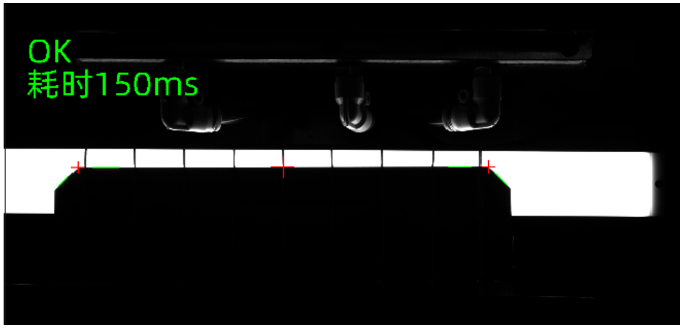
頂部相機基板視覺定位
(2)運動控制
通過預設規劃的SCARA機械手路徑,進行點到點運動控制。在整個過程中,控制系統調整機械手臂關節速度,確保其沿預定軌跡準時到達目標位置。
一旦到達上料點,機械手取料后移至視覺檢測位置,系統隨即進行坐標偏移計算,使得SCARA機械手能夠實時動態調整電池串位置,完成一側的匯流焊接。焊接完成后,機械手將產品隨后轉移到中轉平臺翻轉,然后再次進行坐標偏移計算以完成另一側的焊接。最后,將完整的太陽能電池組件移至下料區。
SCARA機械手路徑
(3)方案應用優勢

方案應用優勢
●集成一體化控制系統:一臺控制器集成了機器視覺、運動控制、IO控制和機械手控制,顯著節省了設備成本,縮短了開發周期,并使安裝布線更加簡潔。
●內置運動控制實時內核MotionRT7:數據核內交互,指令調用速度可達微秒級,可大幅提升加工效率。
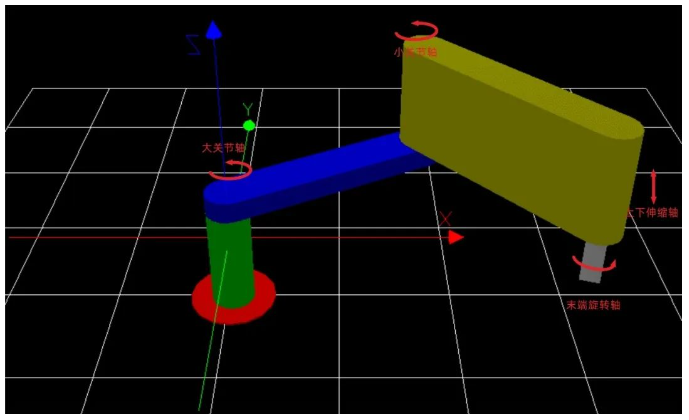
●廣泛支持多種機械手類型:支持30+種機械手算法模型,包括SCARA、Delta、6關節、碼垛等,使機器手控制更加開放和靈活。
●視覺飛拍功能:通過硬件位置比較輸出PSO,可以實現視覺飛拍,提高視覺系統的瞬時觸發速度和精度。
●平滑的運動控制:采用S曲線加速度/SS曲線加加速度連續技術,確保運動控制過程更平滑。
●統一的API函數接口:可兼容各種PC上位機高級語言開發,簡化了工程師的系統集成和應用開發過程。

多種上位機開發方式
三、提供易用的可視化RTFuse機器人系統平臺

可視化RTFuse機器人系統平臺
RTFuse機器人系統是一款面向機械手市場推出的系統級軟件,支持市面上主流的Scara、Delta、六關節、協助、直角坐標等多種機械手類型。
軟件整合了可視化的運動控制、IO邏輯控制、通訊交互、機器視覺等功能,用戶可在示教器上通過系統內豐富的工具進行純圖形化編程,無需編寫代碼即可輕松實現中文示教一站式編程開發。
RTFuse機器人系統平臺產品優勢
(1)技術門檻低
拖拽式中文組態系統編程,經過簡單培訓,應用工程師可輕松上手。從上至下執行項目控制流程,機械手位置手動示教。
(2)系統開放性強
支持多線程控制,除機械手控制外,也可以控制其它附加軸、IO邏輯控制、通訊交互等,一個控制器即可完成。
(3)軟硬件集成性強
集成EtherCAT總線、脈沖混合控制,機器視覺、運動控制,集軟硬于一體易于設備調試與排除問題。
(4)企業用人成本低
一人即可調試設備的運動控制、視覺、IO邏輯控制等,解決工程人員流失、用人成本高等問題。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28468瀏覽量
207359 -
光伏
+關注
關注
44文章
3011瀏覽量
69028 -
機器視覺
+關注
關注
162文章
4380瀏覽量
120408 -
運動控制
+關注
關注
4文章
582瀏覽量
32886
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統」閱讀體驗】+初品的體驗

《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊

工控一體機在智能機器人領域應用的優勢與市場展望


基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
AI加持,高速公路RPA機器人一體機全新升級亮相






 工商網監
工商網監
評論