 Teledyne SP Devices非侵入式干涉成像技術SS- OCT的高性能數據采集
Teledyne SP Devices非侵入式干涉成像技術SS- OCT的高性能數據采集
1、重點:
掃頻源OCT
非侵入式干涉成像技術SS-OCT 的工作原理以及數字化儀的集成和時鐘方面
K-space重映射
2、
歡迎您參加今天的網絡研討會,重點了解 Teledyne SP Devices提供的用于SS- OCT
的高性能數據采集硬件和固件解決方案。
4、
今天網絡研討會的重點是掃頻源 OCT,但我們也為許多其他需要高性能數字化儀進行 OEM集成的應用提供服務,包括質譜、分布式光纖傳感、激光雷達等。
5、

基于我們在這些應用領域的經驗,我們非常熟悉OEM客戶的需求。
我們的數字化儀由全球ISO認證的EMS合作伙伴在瑞典組裝,通過這種合作關系,我們可以每周生產數千塊電路板。我們還受益于與Teledyne的其他業務部門合作,共同進行元器件采購,從而確保了穩定的元件供應和合理的交付周期。
我們擁有廣泛的產品組合,可以為您的整個產品系列提供不同型號的數字化儀, 從而實現成本優化的解決方案。
我們還為 OEM客戶提供定制硬件、固件和軟件的工程設計服務。
最后,我們的內部技術應用支持團隊和本地現場應用工程師將幫助客戶成功實現集成。
6、
以下是今天演講的議程:
首先,我們將簡要介紹SS-OCT的工作原理以及數字化儀的集成和時鐘方面。
接下來,我們將介紹 ADQ3系列中合適的數字化儀型號。
之后,我們將繼續介紹所謂的K-space重映射,這將是本次演示的重點。
我將解釋基本的重映射原理,并簡要討論如何在 GPU或FPGA中實現。
之后,我們將深入了解FWOCT FPGA固件提供的k-clock重映射模式和性能,最后進行總結。
7、
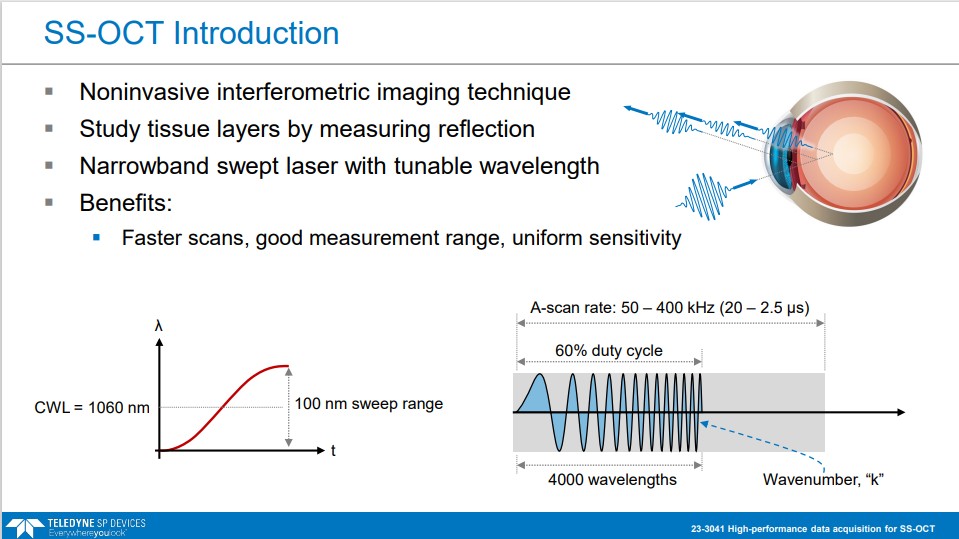
首先,為那些可能不熟悉該應用的人簡單介紹一下 SS-OCT:
SS-OCT是一種非侵入式干涉成像技術,利用波長可調的窄帶掃頻激光源。它通常用于醫學應用,通過測量反射來研究組織層。
與類似技術相比,SS- OCT的一些主要優點是掃描時間快、測量效果好,在整個深度掃描范圍內具有均勻的靈敏度。
不同供應商和系統的激光特性各不相同,但如左下圖所示,中心波長為 1060納
米,掃描范圍為100納米。如紅色軌跡所示,激光是非線性的,這對數據采集有一定的影響,這是關于該應用的一個不尋常的細節。
這種非線性行為會導致數字化儀使 用非均勻時鐘進行計時。或在數字域執行所謂的 k時鐘重映射。
我們將在整個網絡研討會中詳細討論重映射問題。
激光掃描會重復進行,右下圖描述了所謂的 A掃描速率,例如50至400 kHz。在該時間幀內,激光器可以以60%的占空比掃描數千個波長。
在 A掃描中剩余的空閑時間用于重新定位掃描鏡和其他東西,為下一次掃描做準備。
在我們返回到直接計時與 k-space重映射方法之前,讓我們簡單地看一下另外兩種掃描類型。
8、
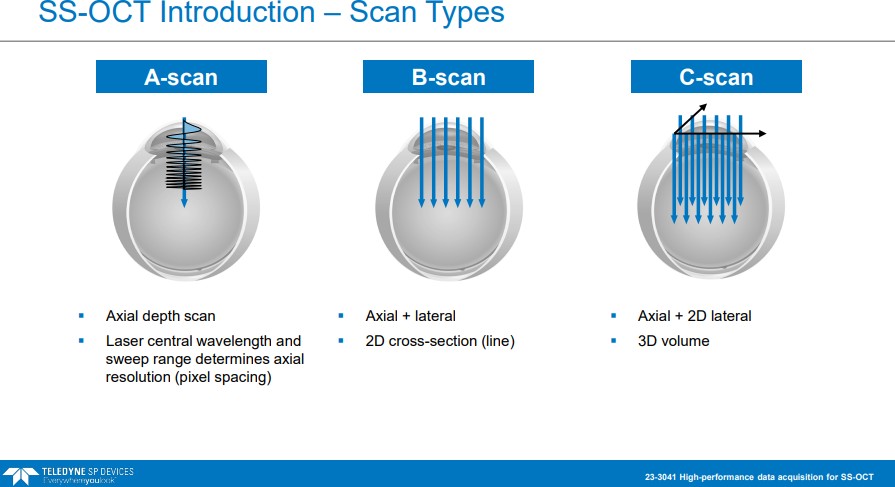
A 掃描是軸向深度掃描,分辨率由掃頻激光的中心波長和掃頻范圍決定。可實現的分辨率通常在幾微米范圍內。
然后進行多次A掃描,以創建稱為B掃描,類似的體積圖像,稱為C 掃描。還有其他類型的掃描,但這些與今天的網絡研討會關系不大。
9、
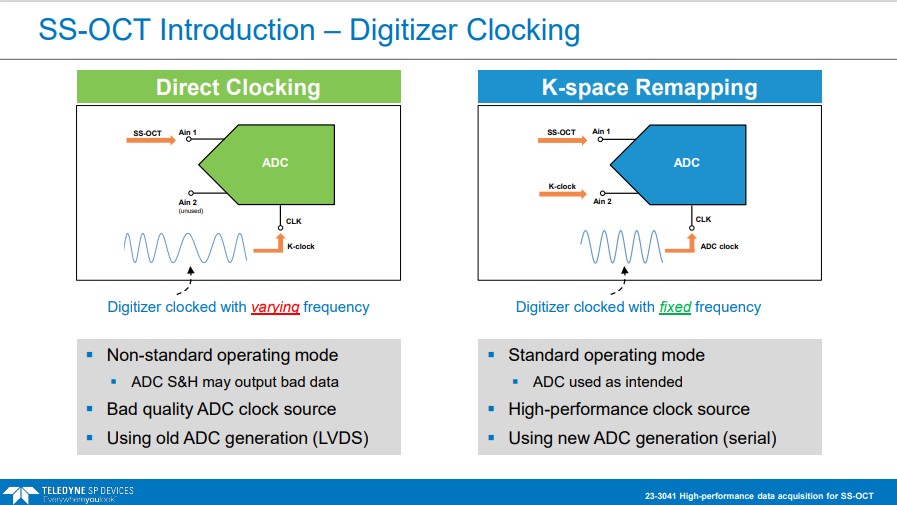
回到前面提到的時鐘——SS-OCT有兩種主要方法,即直接計時或K-space 重映射。我們強烈建議采用第二種方法,下面我將簡要說明原因。
通過直接計時,數字化儀內部的模數轉換器(或稱 ADC)使用源自k-clock的不同變化頻率進行時鐘控制。
這是一種非標準的ADC 工作模式,因為這些設備是為均勻采樣而設計的。
ADC內的所謂采樣保持電路可能會輸出不良數據,而K-clock的質量在抖動和類似性能度量方面也可能不足。
此外,這種類型的時鐘需要使用具有并行接口的舊一代 ADC。綜上所述,有很多理由避免這種做法。
相比之下,K-space重映射利用的是固定頻率的高質量時鐘源。
這是ADC的標準工作模式。
這是一種基于最新一代轉換器,并經得起未來考驗的解決方案,因為會需要更高的采樣率與先進的激光技術相匹配。
OCT信號和K-clock都作為模擬信號進行采樣,并且隨后通過重新映射過程在數字域中校正非線性。
10、
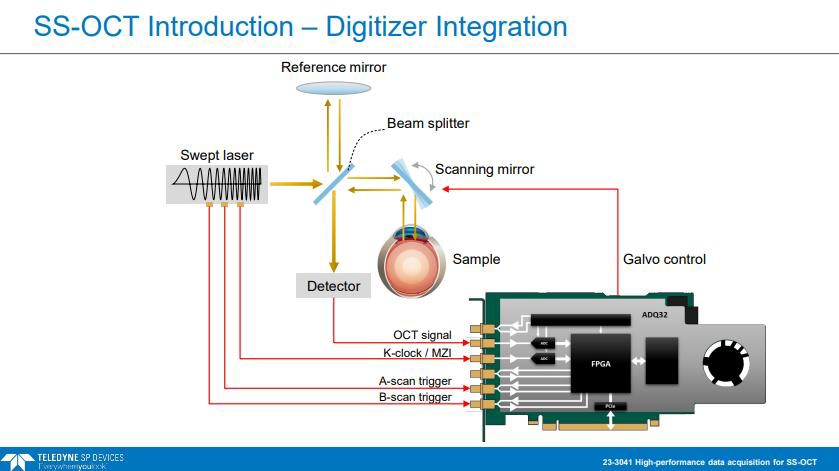
下面是一個高級框圖顯示了使用 K-clock重映射的SS- OCT系統中數字化儀的集成情況。
如圖所示,OCT信號和 K-clock都連接到數字化儀上的輸入通道。
除 K-clock之外,A和B掃描觸發器通常也由掃頻激光器提供給數字化儀,以實現同步數據采集。
如有需要,可使用所謂Mach-Zender 干涉儀或MZI從 OCT信號外部導出k-clock。
所采集的OCT信號包含由源自不同激光波長和組織層的相長干涉和相消干涉組成的疊加信號。
在某些系統中,數字化儀還可以用作掃描鏡的實時控制的主設備,該掃描鏡在連續掃描之間橫向地重新聚焦激光。
如圖所示,我們的數字化儀提供了大量通用輸入/輸出或GPIO引腳。
11、
與許多應用一樣,通常使用數字信號處理技術來校正模擬缺陷,并從獲取的信號中提取相關信息。
例如,在SS-OCT中,使用快速傅立葉變換(或 FFT)來提取深度信息,并且這里希望獲得具有良好能力的寬光譜,并能很好地解析高邊緣頻率成分,以實現良好的軸向分辨率和測量深度。
不過,這些細節不在今天網絡研討會的討論范圍之內,我們將重點討論 K-space
重映射。
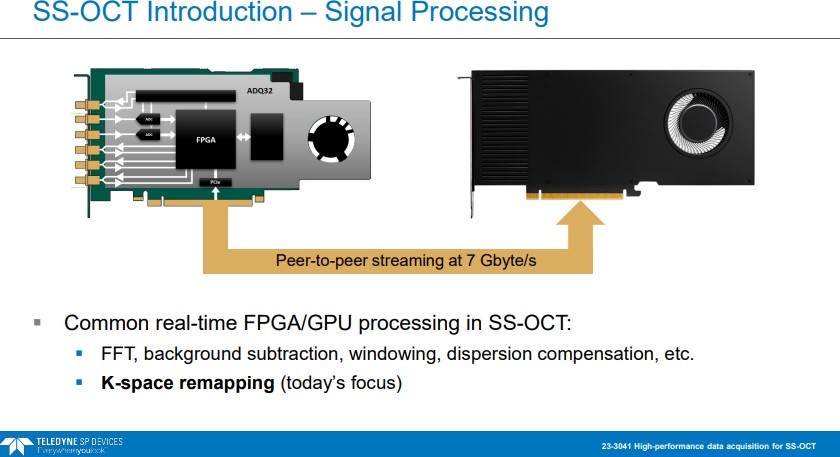
在SS-OCT 中,數字化儀通常與圖形處理單元((GPU)一起使用,并采用所謂的點對點流模式技術,以便在這些設備之間高速傳輸數據。
通過點對點技術,數字化儀可以直接將數據傳輸到GPU的內存中。與需要通過主機PC的RAM復制數據的傳統解決方案相比,這是一個巨大的優勢。
利用點對點技術,主機電腦 CPU/RAM的工作量減少,可以用于其他任務。
我們目前支持每秒7 Gbyte的傳輸速率,但正如我們接下來將看到的,這一傳輸速率很快就會提高。
12、
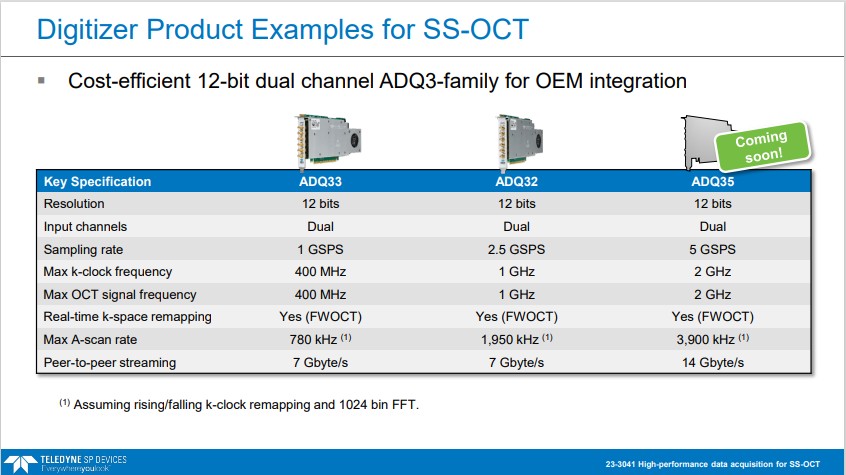
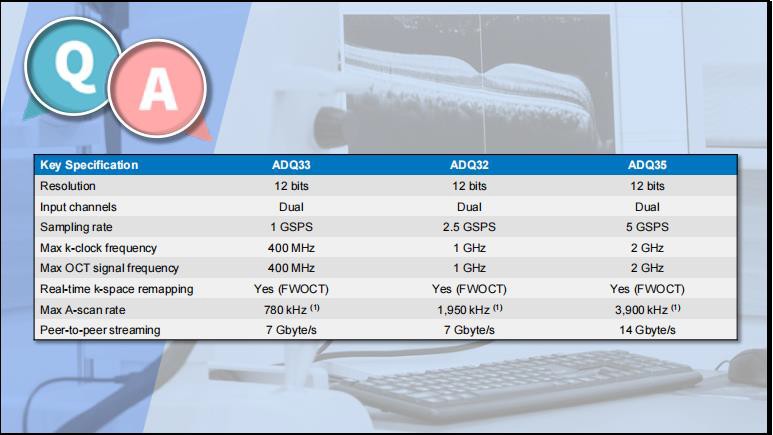
以下是我們為掃頻OCT提供的一些產品的概述。
ADQ3系列是一個性價比高的產品系列,非常適合OEM集成。
如前所述,這些產品均為 12位數字化儀,具有雙模擬輸入通道,可同時采集 k
-clock和OCT信號。
它們都使用相同的應用編程接口(API),因此很容易在不同型號之間切換,或為集成到產品系列中的許多不同數字化儀創建共享代碼庫。
采樣率從ADQ33上的1 GSPS到即將發布的ADQ35 上的5 GSPS不等。類似地,相應的支持的k-clock和OCT信號頻率范圍從400M 到2GHz。
所有型號都支持使用可選 FWOCT固件包在FPGA內進行實時K-space重映射,我們將稍后詳細介紹支持的重映射模式。
列出的最大 A-scan速率是基于這些K-space重映射模式之一的,這里我們還假設使用了 1024-bin FFT。
然而,所使用的 GPIO端口可以支持更高的頻率,因此,這里的限制取決于處理過程而非硬件本身。
這些規格與當前可用的系統以及未來預期的A-scan速率都很好地一致。
我們已經簡要討論過點對點流模式傳輸,正如您所看到的,目前的型號僅支持每秒 7 Gbyte的持續傳輸,而即將推出的ADQ35將支持每秒14 Gbyte的傳輸。
這為主要想使用GPU處理的客戶提供了極大的靈活性,但值得一提的是,我們的
FWOCT固件可以幫助預處理數據,以簡化后續的GPU處理。
13、
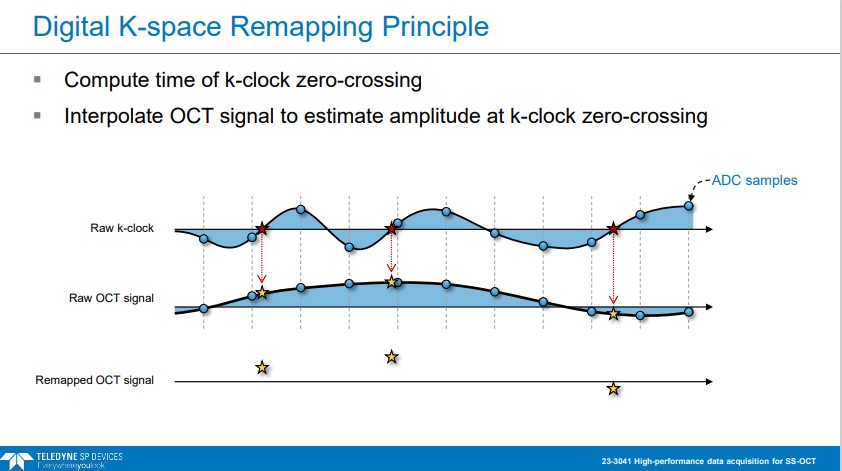
在我們繼續更多關于FWOCT 和GPU處理的細節之前,讓我們先來看看K-space重映射原理。
如前所述,k-clock提供了有關發射激光波長或波數的信息,我們希望將數據采集可以同步到這一時鐘上。
波長變化通常是通過 k-clock的過零點來跟蹤的,這些過零點通常被稱為 "k-clock
點"或"k-clock觸發器",在圖中顯示為紅星的就是過零點。
在這個特定的例子中,我們只包含與上升沿 k-clock轉換相對應的過零點,但FWOCT也還支持其他操作模式。
k-clock頻率不同,因此k-clock點在時間上分布也不均勻。
它們通常與數字化儀采集的采樣點也不重合,此處在圖中顯示為藍點。
K-space重映射是一種數學運算,我們主要使用不同類型的濾波和插值來精確計算
k-clock的過零點。
我們還估算OCT信號曲率,并計算其在k-clock過零點處的振幅。這些振幅值與底部黃色星形所示的重映射的 OCT信號相對應。
現在我們來看看兩種可供選擇的k-space重映射實現方法。
14、
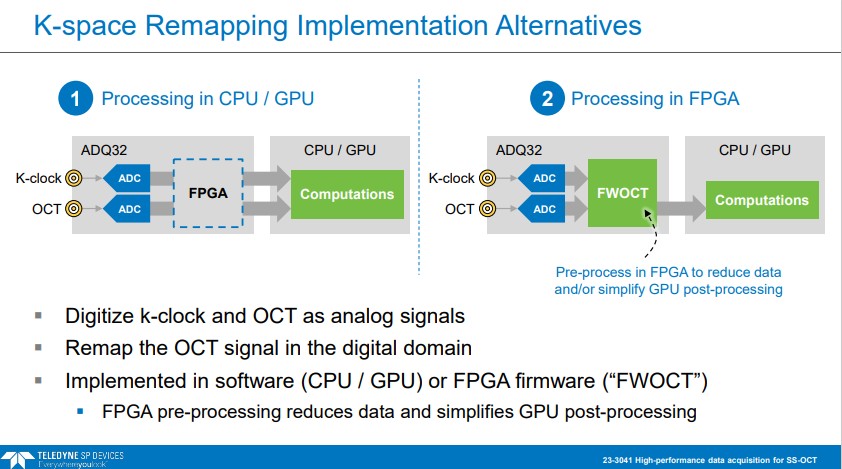
我們的數字化儀在系統級劃分方面提供了極大的靈活性。用戶可以決定是在軟件中執行所有處理,還是利用板載 FPGA。
在這兩種情況下,k-clock和OCT信號都是通過模擬輸入通道采集的,如圖所示, 使用FWOCT是在GPU或FPGA內部執行重映射的。
使用基于板載FPGA 的重映射和其他信號處理的主要好處是簡化了GPU的后續處理過程。在一些應用中,為了顯著節省成本,GPU甚至可以完全排除在外。
15、
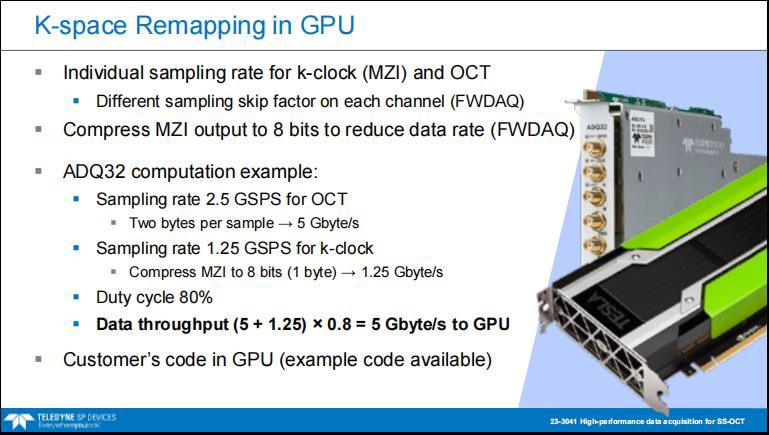
在了解固件解決方案之前,我們先來看一個簡單的GPU重映射示例。
在這種情況下,我們可以利用標準固件FWDAQ的內置功能來降低數據傳輸速率,并根據鏈路容量進行調整。
首先,通過使用所謂的"采樣跳躍 "功能,可以用不同的采樣率進對k-clock和OCT
信號進行數字化。
此外,獲取的k-clock信號可以壓縮為8位格式,而不是原始的 16位格式,從而進一步減少數據量。
以我們的 ADQ32數字化儀為例,OCT信號以采樣率為2.5 GSPS,每次采樣16位
(或一個采樣點相當于兩個字節)。該產品總速率為5 Gbyte/s。
由于采樣跳躍和8位壓縮,k-clock的相應速率僅為1.25 Gbyte/s。
如果我們還考慮到激光器在 A-scan的部分期間處于空閑狀態,并假設占空比為
80%,則總數據傳輸速率為5 Gbyte/s。
這低于目前支持的 7 Gbyte/s的鏈路容量,因此符合實際情況。
值得一提的是,我們同時支持AMD 和NVIDIA GPU以及Windows和Linux。
16、
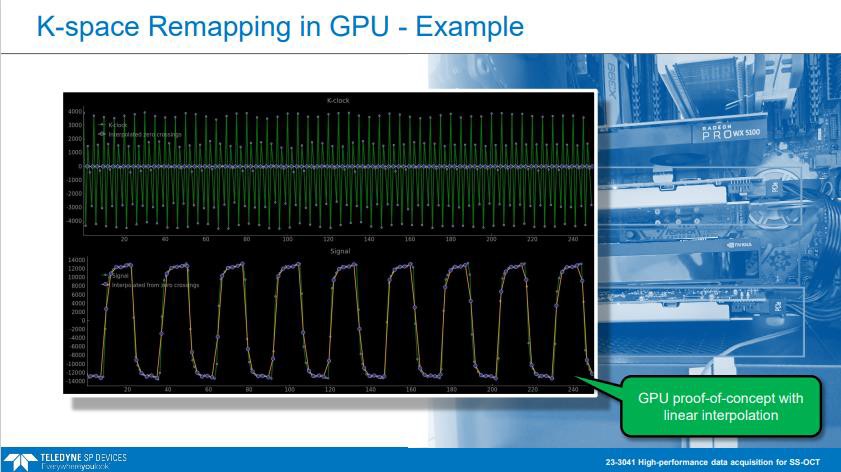
這張圖展示了我們開發的GPU重新映射示例。
OCT信號的曲率是通過線性插值估算出來的。
根據實際情況,這種內插法在現實生活中可能不夠充分,因為估計值可能與實際信號偏差過大。
然而,這個例子可以很容易地修改為使用例如樣條插值法。
17、
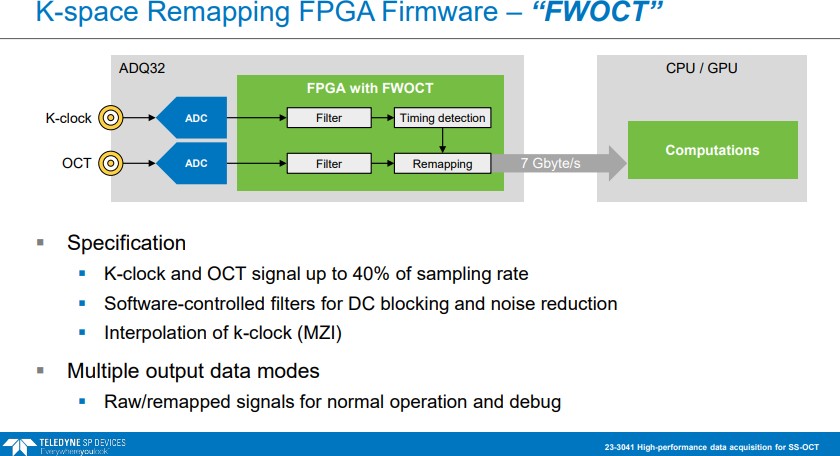
從 GPU轉換到FPGA實現--以下是用于重映射的FWOCT固件概述。
支持的最大 k-clock和OCT信號頻率相當于數字化儀采樣率的40%,以滿足奈奎斯特定理(Nyquist theorem)的要求,即采樣速度至少是最大信號帶寬的兩倍。
FWOCT包含可編程數字濾波器,用于阻斷直流和降低噪音,否則會對重映射質量產生負面影響。
例如,k-clock上不需要的直流電平會垂直向上或向下調整信號,從而使過零點偏離正確位置。
同樣,帶限濾波器也有助于減少噪音,否則會對過零計算的準確性產生負面影響。
定時檢測和重映射模塊包含不同類型的信號處理,例如插值,用于準確確定 k-clock的過零點,并估算OCT的曲率和振幅。
FWOCT支持多種數據輸出模式,用于調試和集成不同類型的原始信號和重映射信號組合。
18、
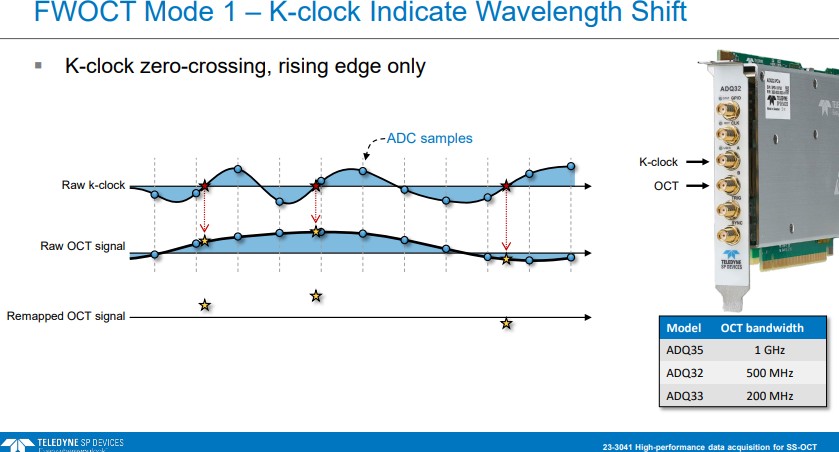
以下是 FWOCT的第一種工作模式的概述,它與我們前面介紹的k-space重映射原理相同。
數字化儀采集k-clock和OCT信號,采樣點在圖中顯示為藍點。
計算上升沿過零點,并利用時序信息計算幻燈片底部顯示的重映射 OCT信號。
該模式支持的最大 OCT信號帶寬顯示在右下表格中。
請注意,最大k-clock頻率是數字化儀采樣率的40%。
例如,5 GSPS的 40%對應的ADQ35支持的最大k-clock頻率為2 GHz。
在此頻率下,我們每周期創建一個重映射點,因此,為了再次滿足奈奎斯特定理,我們需要將OCT信號帶寬限制在該頻率的一半,即對應于ADQ35的1 GHz。
同樣的道理也適用于其他產品和支持的OCT帶寬。
19、
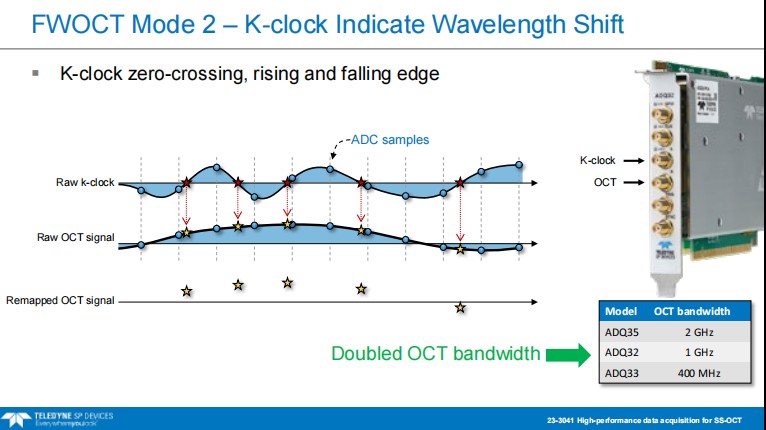
第二種工作模式類似于第一種,但會跟蹤 k-clock上升沿和下降沿的過零點。由于我們產生的重映射值是前一種模式的兩倍,因此在保持k-clock頻率的前提下,支持的OCT帶寬增加了一倍。
在這種模式下,ADQ35可支持高達2 GHz的OCT信號帶寬,ADQ32支持1 GHz,ADQ33支持400 MHz。
在某些情況下,使用該模式可將k-clock頻率降低50%,在這種情況下,支持OCT
帶寬與上一張幻燈片相同。
20、
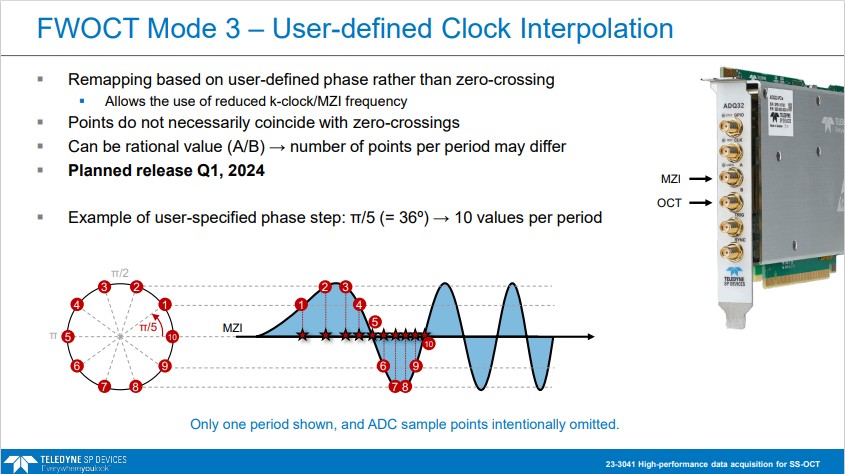
我們目前正在開發一種更靈活的重映射模式。
這種模式適用于數據采集與K-clock特定相位同步的系統。它采用用戶定義的相位步進,而不是過零點。
與上一張幻燈片中的模式2 類似,該模式也允許在每個k-clock周期內進行更多的重映射,這意味著可以降低k-clock 頻率。
與前兩種模式不同的是,這里的重映射點并不一定與k-clock的過零點重合,這取決于用戶指定的相位。
相位步進可以指定為一個有理數,即 "A除以B",因此每個周期的點數可能會因周期而異。
這種運行模式仍在開發中,預計將于 2024年第一季度發布。
下圖是該模式的一個示例,用戶指定的階段步長為"π除以5"。
左下方的單位圓圈顯示了相位步進,說明這一特定相位在每個周期會產生 10個相位值。
相應的重映射點在右圖中以紅星表示。
請注意,該圖只顯示了一個周期,為簡單起見,省略了數字化儀/ADC采樣點。
21、
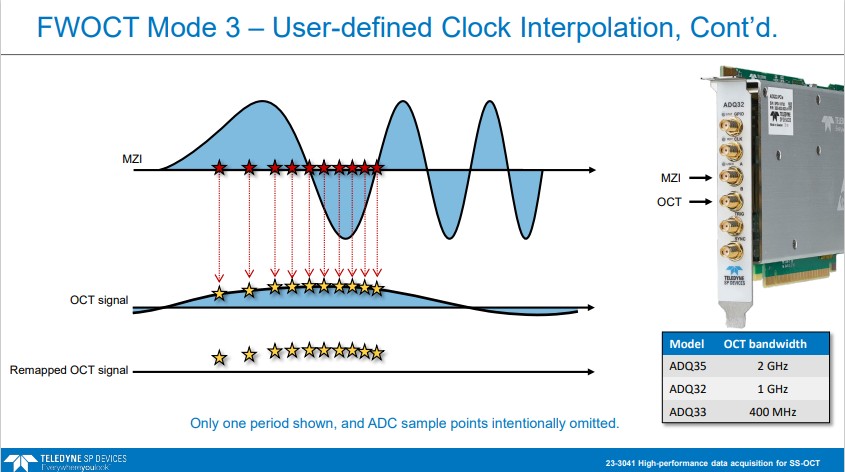
這也是同樣的例子,在下圖中將十個點顯示為紅星,將相應的重映射OCT信號顯示為黃星。
支持的OCT帶寬與模式二相同,但此處可能需要降低最大k-clock速率,這取決于每個周期生成的重映射點的數量。
22、

我不打算詳細介紹這種模式,只是想簡單提一下,有些系統將單通道數字化儀與預定義的重映射時間實例結合使用。
在這種模式下,數字化儀根據存儲在數字化儀內部表格中的k-clock重映射實例執行重映射。
如果您想進一步了解這種模式或任何其他重映射模式,請隨時與我們聯系。
23、
在前幾張幻燈片中,我們回顧了不同類型的k-clock重映射模式。
重映射過程涉及數字信號處理,如插值,以便估算OCT振幅,與任何數學運算一樣,我們不可避免地會引入誤差。
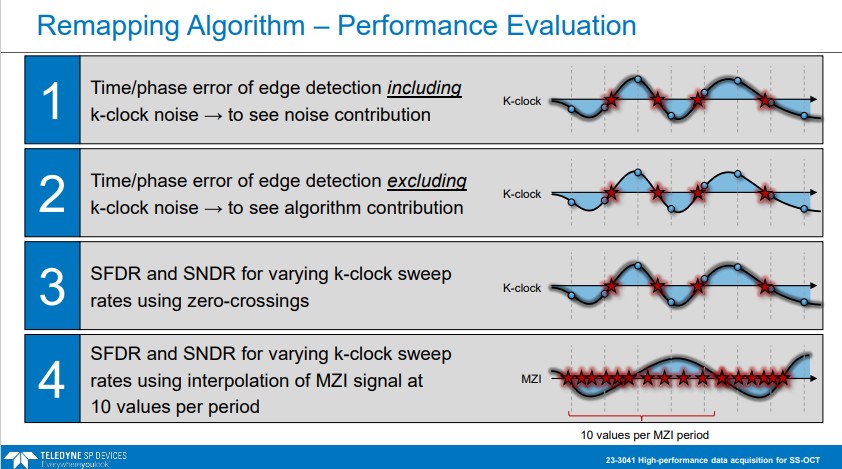
我們進行了四次不同的模擬,向您展示這些誤差的大小和影響。
在前兩個模擬中,我們研究了兩種不同先決條件下k-clock過零的時間/相位誤差:
在第一項評估中,我們加入了實際的k-clock噪聲,以研究噪聲如何影響k-clock過零計算的時序精度。
為了進行比較,我們還在不包含k-clock 噪聲的情況下進行了評估,以了解算法在理想條件下的表現。
這有助于我們將時序誤差從算法本身分離出來,從而確定它是否對算法的整體誤差有重大影響。
此外,我們還進行了傳統性能模擬,包括無雜散動態范圍(SFDR)和信噪比(SNDR)。
這些評估是針對我們討論過的兩種工作模式進行的,即上升/下降沿過零模式以及用戶定義的每周期十個值的插值模式。
我們將很快了解詳情,但首先讓我們來看看時序/相位誤差。
24、
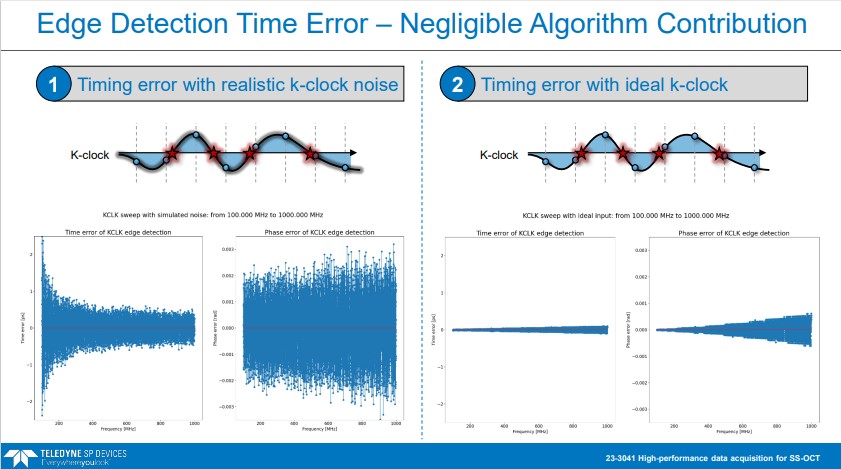
在這里,您可以看到有k-clock過零和無k-clock過零的時間誤差的時序誤差。
左下圖顯示了以皮秒為單位的k-clock過零計時誤差(Y軸)和k時鐘頻率(X軸)。
頻率較低時,k-clock斜率在過零點附近較為平緩,因此噪聲的影響更大,導致誤差幅度也更大。隨后,隨著k-clock頻率的增加,誤差逐漸減小。
總體而言,最大誤差約為 2皮秒,相當于ADQ32數字化儀400皮秒采樣周期的0.5%。
右下圖顯示了算法本身的貢獻,不難看出,與k-clock噪聲相比,誤差幅度微不足道。
因此,算法精度并不限制了可實現的性能。
25、
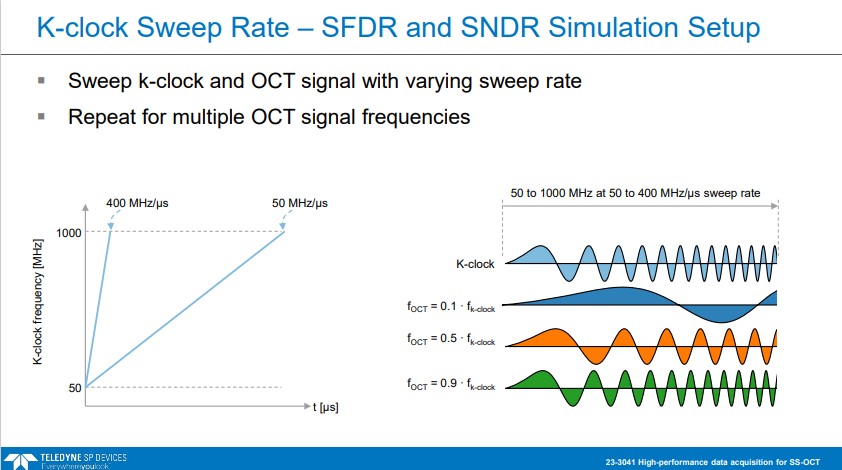
下面是用于計算SFDR和SNDR的設置概覽。
如左圖所示,k-clock頻率從50 MHz掃頻到1 GHz,掃頻速率從50 MHz/μs到
400 MHz/μs。
如右圖所示,對于每種掃描速率,OCT信號頻率也相對于k時鐘頻率進行改變,使其分別對應于k時鐘頻率的10%、50%和90%。
然后,我們計算了每種情況下的 SFDR和SNDR,以研究這些參數如何影響最終性能。
26、
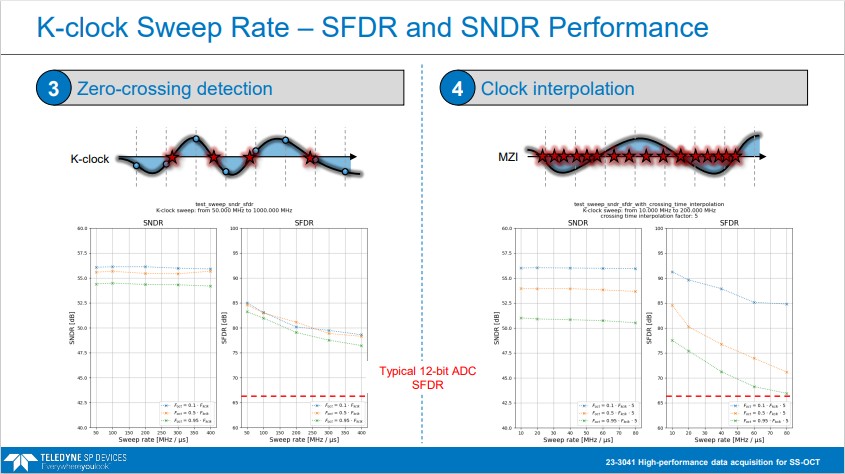
下面是SFDR和SNDR的模擬結果。
我不會過多討論這些細節,但從高層次來看,較高頻率下 SFDR性能下降的原因是相位誤差增大。
原始數據中用于插值重映射點的樣本較少,因此單個樣本的噪聲對整體結果的影響較大。
這些模擬的目的是驗證算法不會降低系統級性能。
因此,我們將模擬結果與 12位寬帶GSPS ADC的典型性能進行了比較。
在實際應用中,12位數字化儀通常支持約65 dBc SFDR,而您可以看到仿真結果優于此值。
因此,結論是該算法不會對可達到的性能水平產生負面影響。
27、
最后,我們來總結一下:
我們一直在關注用于SS- OCT的高性價比ADQ3數字化儀系列。
它是一個靈活的產品系列,支持各種性能需求,而且 API的重復使用簡化了將多種不同型號的數字化儀集成到您的產品系列中的過程。
我們相信,數字k-space重映射是面向未來的SS-OCT 解決方案的最佳選擇。
我們的數字化儀結合使用 FPGA 和 GPU,在系統級分區方面提供了極大的靈活性。
我們的FWOCT固件支持多種:
基于k-clock過零點、用戶定義相位或基于表的方法的k時鐘重映射模式。
它還通過在板載 FPGA內執行k-space重映射來幫助GPU卸載。
這種靈活性使其成為幾乎所有 SS-OCT系統的理想選擇。
審核編輯 黃宇
-
OEM
+關注
關注
4文章
402瀏覽量
50336 -
數據采集
+關注
關注
38文章
6055瀏覽量
113625 -
數字化
+關注
關注
8文章
8710瀏覽量
61730 -
OCT
+關注
關注
2文章
33瀏覽量
3737
發布評論請先 登錄
相關推薦
Teledyne 為 Photonics West 帶來其最具創新性的成像解決方案

數據采集器的類型與特點 如何優化數據網關的性能
貿澤開售用于快速開發精密數據采集系統的 Analog Devices ADAQ7767-1 μModule DAQ解決方案
振弦式土壓力計的數據采集方法
使用800nm OCT光譜儀實現超深OCT成像

OCT:從原理到關鍵參數
Acqiris掃頻OCT高速數據采集卡! 采樣速度高達4GS/s!

多通道數據采集器的作用有哪些
法雷奧與Teledyne FLIR攜手開發汽車安全系統熱成像技術

物通博聯數據采集網關支持電流電壓模擬量數字量485數據采集

基于物通博聯工業數據采集網關的工廠數據采集方案





 工商網監
工商網監
評論