 因為延遲低,所以倒車影像全都用模擬攝像頭?
因為延遲低,所以倒車影像全都用模擬攝像頭?
電子發燒友網報道(文/梁浩斌)最近有博主在某社交平臺上發布視頻宣稱,“再好的數字監控也有半秒到一秒的延遲,而模擬信號傳輸的監控幾乎沒有延遲,因此汽車倒車影像一定都是模擬攝像頭。”
從原理上看,由于數字信號傳輸需要先將CIS輸出的模擬信號經過調制、編碼等流程轉化為數字信號,再進行傳輸,因此相比模擬信號從原理上延遲肯定是要高一些。
不過問題來了,汽車倒車影像真的都是模擬攝像頭嗎?數字攝像頭延遲真有這么高?
車載模擬攝像頭仍是主流
由于技術成熟、延遲低且成本低廉、以往我們在很多車輛上看到的倒車影像、流媒體后視鏡、360環視等,無論是前裝還是后裝,都采用模擬信號傳輸,比如2021款豐田凱美瑞的倒車影像就采用了AHD。
AHD即模擬高清視頻信號協議,是韓國Nextchip公司推出的模擬高清解決方案。AHD在已有的模擬傳輸線上可以實現500米的高清視頻信號可靠傳輸,采用了Y/C信號分離和模擬濾波技術,可以有效地減少高頻區的色噪聲,將信號干擾做到最小。
AHD號稱零延時,能夠將前端數據未經編碼壓縮到后端,實現全實時、高保真,目前AHD2.0最高可以支持1080P@30fps輸出。
當然在模擬高清領域,還有國內兩大安防巨頭大華的CVI(高清復合影像接口)和海康威視主推的TVI,AHD與這兩種方案大同小異,同時這兩家廠商也推出了一些后裝的倒車影像相關產品。
從原理上看,視頻模擬信號傳輸時延低的主要原因是,CMOS圖像傳感器本身輸出的就是模擬信號,在手機、數碼相機等產品上,CIS是通過內部的模數轉換電路將模擬信號提前轉為數字信號并輸出給外部設備進行處理。
而模擬攝像頭由于信號不需要復雜的編解碼和壓縮,信號處理方式較為簡單,只涉及信號放大、濾波和調節等基本的處理,減少了信號處理的步驟;同時模擬信號通過同軸電纜傳輸,作為一種連續的信號,相比數字信號網絡傳輸中可能出現的丟包和重傳等問題,同樣也降低了時延。
所以通常模擬攝像頭的延遲會比數字攝像頭低,這種情況在如今一些智能汽車上有較為明顯的表現。比如在某新能源汽車論壇中,有不少車主反映倒車影像有可以被感知的時延。
另一方面,從攝像頭到顯示的延遲,包括本身從CIS中輸出就存在一幀的初始時延、信號處理的時延、顯示屏的時延。其中顯示屏本身產生時延因素包括顯示屏和視頻輸入的幀率(幀率越高時延越低)、響應時間等,比如OLED的響應時間原理上天生比LCD更快。
數字攝像頭將逐步取代模擬
雖然時延這個單一參數,模擬攝像頭是有一定優勢,但除了時延,技術的發展下,模擬信號圖像傳輸的優勢幾乎只剩下價格低了。
從實際應用來看,FPV無人機對圖傳延遲的要求比汽車更高,以往FPV圖傳也較多使用模擬信號傳輸。然而模擬圖傳的畫面質量有很大的局限,且易受到干擾,如今行業龍頭大疆也一直往數字圖傳的方向發展,在高畫質的同時做到低延遲。
比如大疆FPV飛行眼鏡V2使用的數字圖傳系統,在低延遲模式810p/120fps時,畫面延時可以低于28 ms。
另一方面,從參數來看,目前AHD也最高只能輸出1080P@30fps的視頻,這在智能化時代,難以滿足要求。首先是模擬圖像后期能夠使用的算法處理有限,難以處理復雜的畫面,比如逆光、暗光等場景下。如果在模擬攝像頭外額外增加模數轉換模塊,則會額外增加延遲。數字攝像頭一般是在CMOS傳感器內部集成了轉換電路,延遲幾乎可以忽略。
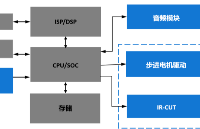
如今車載攝像頭中,CIS需要集成多種圖像處理的功能,對圖像質量、低照度、動態范圍等要求較高,在智能汽車高階ADAS應用中還需要去除運動偽影、LED閃爍抑制等。
這就對圖像處理ISP提出了更高的要求,同時又對低時延有高要求,因此如今的車載CIS通常會集成專用的ISP,通過片上集成來降低數據處理延遲。
因此盡管價格更高,但更高的集成度、ISP加入所帶來更好的顯示效果,都使得模擬攝像頭開始逐步退出汽車市場。
在延時方面,目前的一些車載攝像頭應用中,數字傳輸也已經做到難以感知延遲的水平。根據《道路車輛-攝像機監控系統的人體工程學和性能方面-要求和測試程序》(ISO 16505-2019)國標要求,電子后視鏡延時應小于200ms,這與歐洲當前的標準相同。
國內Tier1德賽西威目前的電子后視鏡系統級產品方案能夠做到60ms內的系統延遲,此前點昀技術展示過的電子后視鏡方案延遲更是能做到20ms。
小結:
模擬攝像頭雖然存在一些優勢,但總體性能存在著較低的上限,發展空間相對較小。而當前應用中,高分辨率、高幀率、高動態范圍等成為汽車等終端應用的核心需求,且在技術的發展下,延遲問題正在不斷得到優化。因此,評價一項技術需要從應用場景出發,而最終市場的反饋會決定這項技術的發展方向。
-
模擬攝像頭
+關注
關注
0文章
3瀏覽量
5768
發布評論請先 登錄
相關推薦

飛凌嵌入式-ELFBOARD OV5640攝像頭講解第2期
攝像頭及紅外成像的基本工作原理

飛凌嵌入式-ELFBOARD OV5640攝像頭簡介第二期



探討車載攝像頭ESD問題的成因及解決策略
用usb攝像頭替換手機前置攝像頭可以嗎
AHD攝像頭與CVBS的區別
舊手機攝像頭改usb攝像頭怎樣焊接





 工商網監
工商網監
評論