 TinyML如何改變駕駛條件檢測領域的面貌
TinyML如何改變駕駛條件檢測領域的面貌
根據最新研究,駕駛模式可能成為汽車制造商尋求打造終極駕駛體驗的新契機。
在一份于2021年發表的論文中,研究人員表明,特定的駕駛模式可能會使電動汽車 (EV) 在高速公路上巡航時的電能消耗增加15%至30%。
AI道路狀態監測
根據J.D. Power于2023年進行的一項研究,消費者仍然受到續航焦慮的困擾,在理想情況下,將電池壽命提高約三分之一可能會顯著提高客戶滿意度。駕駛模式還可應對濕滑、結冰或積雪等危險路況,支持更安全的駕駛。問題在于,在不同模式之間切換需要駕駛員手動選擇適當的設置。
駕駛模式真的太棒了!為什么它們不能是自動的呢?
本質上,駕駛模式代表著各種動力傳動配置,這些配置旨在創造或強調特定的駕駛體驗。例如,通過修改轉向管柱的響應、懸掛的靈活性或再生制動的激進性,系統將創造截然不同的駕駛體驗,從而專注于特定的目標。
傳統的Eco模式降低了響應性并改變了變速比以優先考慮節能,而Comfort模式調整了懸掛以更好地吸收顛簸。相反,Sport模式確保強勁的油門響應、更重的方向盤和更硬的懸掛,使駕駛者體驗更接近賽車而非巡航。
汽車制造商不會自動從一種模式轉換到另一種,因為它們之間的差異非常顯著,可能會驚嚇到司機。然而,除非在現代高速公路上長時間連續行駛,否則駕駛條件很少是一致的。
往往,用戶會遇到需要Eco模式的緩慢交通,然后是在大規模施工下的顛簸區域,適合Comfort模式,之后需要快速加速以脫離停滯,這時短暫啟用Sport模式將極大地受益,然后應再切換回Eco模式。這還沒有考慮到突然的天氣變化。雪地模式會調整傳動并降低了油門響應,從而降低動力和扭矩。目標是防止汽車卡住,從而避免駕駛員受到來自自然環境和他們自己的傷害。通過減慢響應并強制平穩加速,大幅減少車輪陷入雪地的風險,即便駕駛員突然踩下油門,也不會輕易失控。
然而,駕駛員應該高度專注于道路本身,不該花精力考慮駕駛模式的切換。面臨天氣的突然變化,汽車應該幫助用戶專注于周圍環境,而不是用模式和設置分散他們的注意力。
AI與人
解決這個問題的方案可能在于機器學習。由于擁有眾多傳感器,車輛能夠比任何人更準確地檢測道路、天氣和其他條件。事實上,車輛在處理濕滑或危險條件時非常精準且敏銳,以至于牽引控制和防抱死制動系統等功能幾十年來一直是強制性的。
系統也變得如此智能,牽引力控制可以在正常條件下協助駕駛員避免在轉角處欠轉向或過度轉向。因此,使用機器學習自動檢測道路條件并選擇最佳模式是多年來塑造汽車創新的自然演變。
然而,構建自動的駕駛模式系統和道路檢測機制可能具有挑戰性,工程師們常常疑惑從何處入手。以下是啟動項目并縮短產品上市時間的三個簡單步驟。
第一步
獲取AEKD-AICAR1套件
創建一個機器學習應用可能看起來是一項艱巨的任務。當團隊考慮收集數據、訓練神經網絡以及在微控制器上實施算法時,他們甚至在第一個概念驗證之前就可能會感到氣餒。
小公司甚至可能沒有數據科學家以及處理神經網絡的專業知識。因此,我們發布了AEKD-AICAR1評估套件,旨在揭開這一過程早期階段的神秘面紗。
該套裝包括AEK-CON-SENSOR1連接開發板和AIS2DW12三軸加速度計。主板本身配備了SPC58ECChorus微控制器,內置4 MB的Flash存儲器,并預裝了一個經過訓練的神經網絡。簡而言之,AEKD-AICAR1傳感器節點套件包含了開發者開始機器學習所需的一切應用程序。
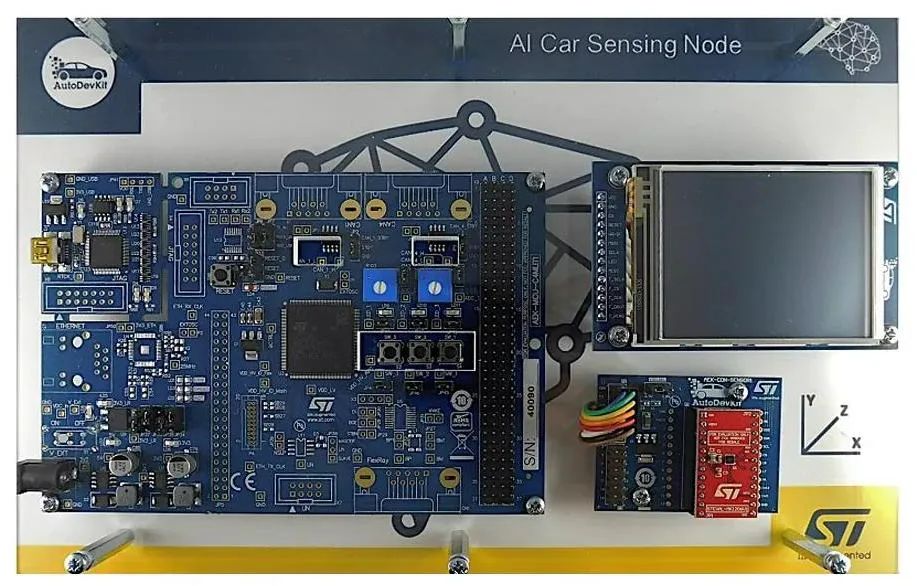
我們甚至提供了一個顯示屏,展示代表汽車狀態的簡單UI,確保團隊可以更容易地演示概念驗證。系統還有一個設置,可以使用典型的12 V電池或八節AA電池供電,從而提高整體移動性。
第二步
利用意法半導體的軟件生態系統
開箱即用,預訓練的神經網絡能夠識別四種狀態:正常道路、顛簸道路、打滑和停車。此外,可以將這些狀態與其他情況結合起來,如在正常道路上打滑、在顛簸道路上打滑、發動機運轉時停車或熄火時停車。
顯然,由于該應用僅用于演示目的,我們使用了一小組訓練數據。然而,盡管一開始可用的訓練數據非常有限,我們仍獲得了94%的高成功率,僅在一些額外的條件下存在問題。簡而言之,團隊已經可以設想,擁有大量更多信息和復雜算法后他們能夠取得什么樣的成就。
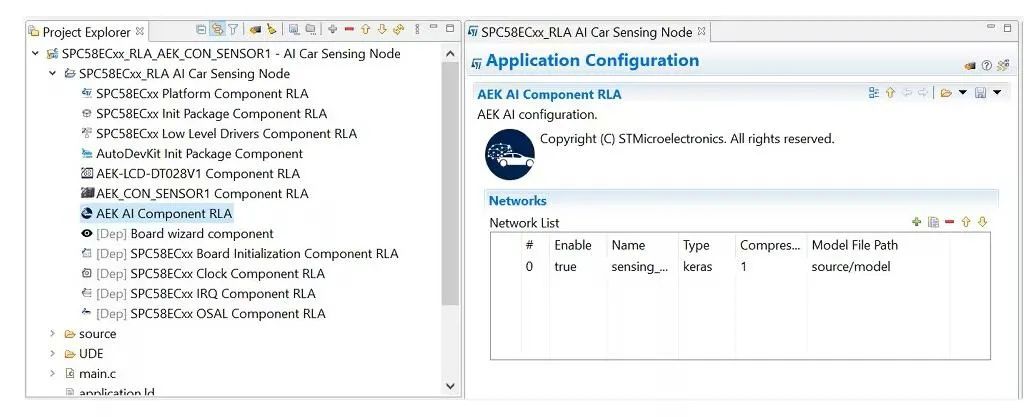
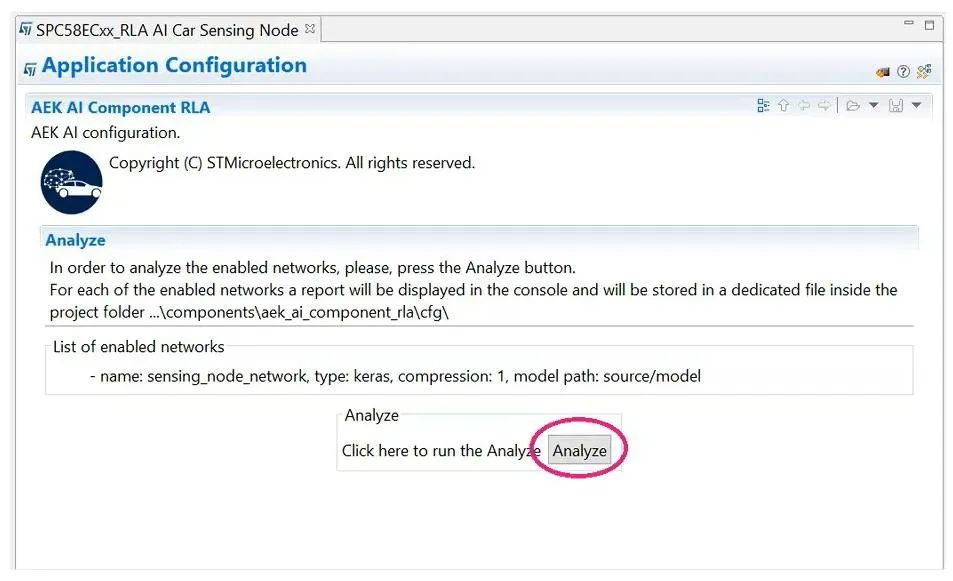
為開始測試模型,開發人員只需獲取AutoDevKit Studio和SPC5-STUDIO-AI插件即可,這將使他們能夠導入最流行的深度學習框架,如Keras和TensorFlow Lite。意法半導體插件甚至可以驗證神經網絡,并在微控制器上模擬自身性能,能夠幫助開發人員基本了解所需的內存占用和推理時間。
無論團隊的專業水平如何,這一步都非常重要,對于經驗較少的工程師,所帶來的幫助則尤為巨大。在邊緣進行機器學習工作時,很容易高估RAM或計算吞吐量的要求。我們的工具可以幫助更快、更準確地了解應用的硬件需求。
第三步
測試您的應用并加以完善
下一步是將AEKD-AICAR1置于在駕駛員一側的地板上,靠近車輛前部,從而測試算法并捕獲更多數據。實際上,這樣可以模仿現實世界的性能并收集更多信息。因此,工程師不僅僅是在設計一個更智能的駕駛條件檢測,而且同時也是在完善它。
隨著團隊從加速度計或連接到套件的其他傳感器收集更多數據,就有可能更準確地檢測到更多道路條件,從而為真正意義上的駕駛模式智能選擇奠定基礎。我們的用戶手冊甚至提供了Python腳本和Google Colab的操作指南,因此即使對數據科學沒有太多經驗的人也可以開始使用。
另請閱讀:AEKD-AICAR1-汽車中基于意法半導體開發板的機器學習功能,既不盲目上馬,也不輕易落后
爭當第一的競賽
遵循這三個步驟將幫助團隊在正確的軌道上啟動。開發人員仍然需要優化自身的解決方案,并找到一條能夠獲得競爭力的市場路徑。然而,意法半導體不僅提供支持,還提供了一個完整的合作伙伴計劃,擁有專業知識的眾多伙伴公司將可為客戶帶來獨特的優勢。簡而言之,問題不在于機器學習能否幫助實現駕駛模式選擇和道路條件檢測的自動化,而在于誰將第一個成功實施它。
審核編輯:劉清
-
微控制器
+關注
關注
48文章
7542瀏覽量
151316 -
電動汽車
+關注
關注
156文章
12067瀏覽量
231110 -
神經網絡
+關注
關注
42文章
4771瀏覽量
100715 -
機器學習
+關注
關注
66文章
8406瀏覽量
132565 -
汽車制造
+關注
關注
0文章
240瀏覽量
15986
原文標題:為駕駛模式開發AI!TinyML如何改變駕駛條件檢測領域的面貌
文章出處:【微信號:STMChina,微信公眾號:意法半導體中國】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
電池氣密性檢測儀:科技改變電池檢測方式
華為發布駕駛員行為異常檢測新專利
人工智能工業領域應用有哪些
雨刮器壓力分布檢測wipe有用嗎?
智能網聯是否是自動駕駛落地的必要條件?
Robotaxi發展再加速,智能駕駛傳感領域檢測迎來全新挑戰

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
瑞薩電子推出Reality AI Explorer Tier,用于開發AI與TinyML解決方案
嵌入式熱門領域有哪些?
無損檢測適用條件及優缺點
TinyML在機器人中的應用——創建語音控制機器人子系統
觸想智能工業顯示器在智慧醫療領域的應用優勢分享
自動駕駛領域的數據集匯總

自動駕駛領域中,什么是BEV?什么是Occupancy?






 工商網監
工商網監
評論