 迅為iTOP-RK3588開發板Buildroot系統功能測試
迅為iTOP-RK3588開發板Buildroot系統功能測試
第三章 Buildroot系統功能測試
燒寫buildroot系統鏡像,buildroot系統鏡像在網盤資料“iTOP-3588開發板\01_【iTOP-RK3588開發板】基礎資料\06_iTOP-RK3588開發板Linux鏡像\01_Buildroot鏡像”目錄下,本小節測試buildroot系統。
3.1系統啟動
Buildroot系統啟動后,串口如下圖所示:
如果連接了屏幕,是可以看到系統桌面的,桌面顯示如下圖所示,默認已經支持wayland桌面環境及一些QT應用。

3.2多路視頻播放測試
多路視頻播放器用于測試設備的多路視頻播放能力,顯示能力以及硬件解碼能力,點擊啟動桌面上的“multivideoplayer”應用會自動循環播放九路視頻的demo,
3.3 GPU測試
glmark2是一個用于測試圖形處理單元(GPU)性能的開源基準測試工具。它基于OpenGL API,并使用了一系列的渲染場景和特效來評估GPU的性能表現。點擊桌面上的“glmark2”應用,啟動后將進行GPU測試,
測試完成之后可以在終端得到相應的得分,
3.4系統信息查詢
查看內核和 cpu 信息,輸入如下命令:
uname -a
查看操作系統信息:
cat /etc/issue
查看環境變量信息:
env
3.5 U盤測試
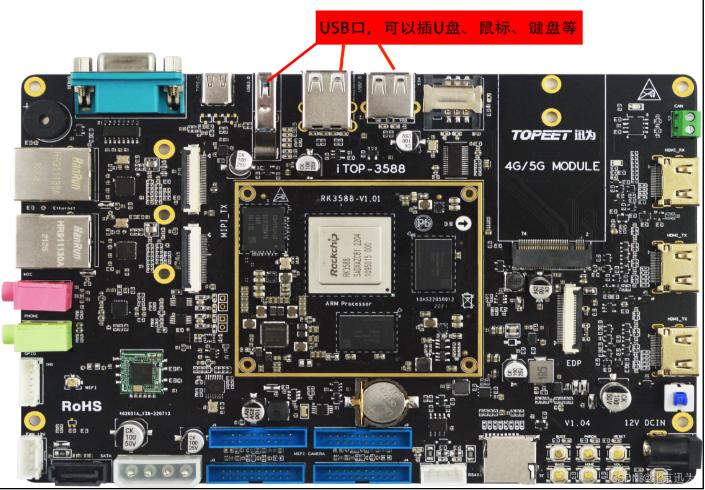
當插入 U 盤以后,U 盤的格式必須為 FAT32 格式,大小在 32G 以下(底板上 4 個 USB 接口都可以插入U 盤),如下圖所示。
方法一:
1 將U盤(U盤的格式必須為FAT32格式,大小在32G以下)插到開發板的usb接口,串口打印信息如下所示,U盤的設備節點是/dev/sda1。U盤的設備節點不是固定的,根據實際情況來查看設備節點。
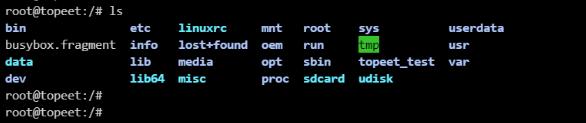
2 在buildroot系統下,U盤會自動掛載到/mnt/udisk目錄下,可以通過“df -h”命令查看掛載路徑,
方法二:
Buildroot 支持自動掛載外部存儲設備,連接屏幕以后,打開桌面上的“qfm”APP,依次點擊“USB Disk”,就會進入U盤掛載目錄。U 盤掛載路徑:/udisk ,如下圖所示:
3.6 TF卡測試
方法一:
1 將TF卡(TF 卡的格式必須為FAT32格式,大小在32G以下)插到開發板的TF 卡插槽,正常情況下串口打印信息如下圖所示:
2 默認情況下TF卡掛載到 /mnt/sdcard目錄下,輸入以下命令查看掛載目錄:
df -Th
方法二:
Buildroot 支持自動掛載外部存儲設備,連接屏幕,打開桌面上的“qfm”APP,依次點擊“SD Card”,進入TF卡掛載路徑,如下圖所示:
3.7 USB鼠標鍵盤測試
將USB鼠標和鍵盤接入iTOP-3588開發板的usb接口,串口終端的打印信息如下圖所示:
此時在屏幕上出現箭頭光標,鼠標和鍵盤已可正常使用。
當拔掉usb鼠標和鍵盤時,串口終端打印如下:
此時屏幕上箭頭光標消失,鼠標已成功去除。
3.8 Linux 485 測試
本章節配套資料在網盤資料“ iTOP-3588開發板\02_【iTOP-RK3588開發板】開發資料\09_系統外設功能測試\01_buildroot系統測試配套資料\01_485測試配套資料”目錄下。
3.8.1 485硬件連接
485電路圖如下圖所示:
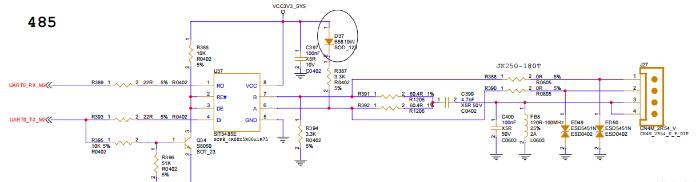
由原理圖可知,485使用的串口0,可以通過/dev/ttyS0來控制。接下來使用USB轉RS485模塊進行測試(需要自行準備)。USB轉RS485模塊如下圖所示:
由原理圖可知,開發板底板上1號引腳是B,2號引腳是A ,4號引腳連接地,然后將 1 2引腳連接到 USB轉RS485模塊上,A接A,B接B,如下圖所示:

3.8.2 測試485
開發板發送數據測試:
注意,默認波特率為115200!
進入到測試例程目錄下,如下圖所示:
在電腦上打開串口助手,選擇對應的串口號和波特率,注意:默認波特率為115200!
打開串口,
輸入以下命令運行測試程序發送數據,發送的數據為123456789,數據信息可以自定義
./uarttest /dev/ttyS0 send 123456789
電腦端接收到信息,如下圖所示:
輸入以下命令開發板接收數據,如下圖所示:
./uarttest /dev/ttyS0 recv
電腦端發送數據,如下圖所示:
開發板收到數據,如下圖所示:
485測試完畢。
3.9 wifi連接測試
方法一
qsetting 是系統設置工具,其中可以設置 WiFi 連接。進入桌面“qsetting”,點擊WiFi后,點擊右上角開關打開 WiFi ,設備將自動搜索周圍WiFi。
點擊想要連接的WiFi名,輸入密碼完成連接,
方法二
除此之外也可以使用命令進行連接wifi。進入到/topeet_test/02_wifi/目錄下,
在測試wifi之前,將有線關閉,輸入以下命令:
ifconfig eth0 down
ifconfig eth1 down
運行wifi_sta_connect.sh腳本,連接wifi,如下圖所示,輸入選擇連接的wifi名稱和密碼。
wifi連接好后,ping下百度檢查是否鏈接成功。
ping www.baidu.com
3.10 藍牙測試
首先燒寫buildroot系統,然后使用以下命令運行bluetoothctl交互命令,如下圖所示:
bluetoothctl
使用命令power on打開藍牙,藍牙默認是關閉的,并且重啟系統之后默認也會關閉。輸入以下命令:
power on
使用命令agent on選擇要連接的設備類型或者去選擇一個特定的類型,輸入以下命令:
agent on
如果你在agent命令之后按下倆次tab鍵,可以看到一些可以使用的類型列表,比如DisplayOnly,KeyboardDisplay等等,
使用default-agent 命令去確認并完成要連接的設備類型
default-agent
使用advertise on命令嘗試打開BLE廣播包,來確認Bluez的BLE模塊是否初步正常, 顯示如下所示即正常。
然后使用以下命令進行藍牙掃描,一段時間之后使用第二條命令打印掃描到的設備信息,如下圖所示:
scan on
使用devices命令去獲得想要去配對的設備MAC地址
devices
使用命令pair MAC_address 去配對設備(使用Tab鍵可以自動補全MAC地址),作者連接A4:46:B4:D5:95:E6,這里作者已經連接過了。
使用命令 connect MAC_address 去連接設備。作者連接A4:46:B4:D5:95:E6。
使用命令 connect MAC_address 去連接設備。作者連接A4:46:B4:D5:95:E6。
配對成功之后,手機的顯示
在手機中播放一首歌曲,在開發板上連接上耳機,便可以播放音樂。
至此,在buildroot系統下的藍牙測試成功。
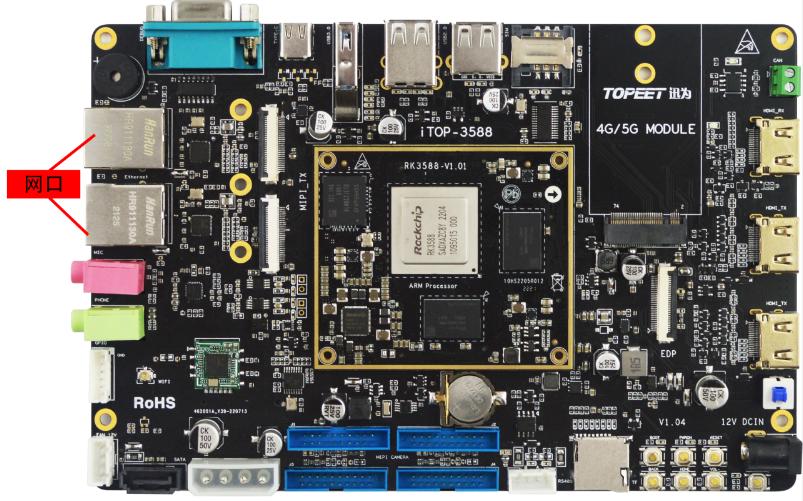
3.11 千兆以太網測試
首先準備一個千兆路由器,一根千兆網線,開發板倆個網口都可以連接外網,將網口通過網線連接到路由器的千兆口。
在串口終端也可以查看IP地址,可以根據自己的需求選擇連接的網口并使用命令查看網口的IP,如下圖所示:
ifconfig eth0 //查看網口0的IP
輸入以下命令對網口的連通性測試,倆個網口都支持連接外網。
ping -I eth0 -c 10 www.baidu.com
3.12 4G模塊測試
配套資料在網盤資料“iTOP-3588開發板\02_【iTOP-RK3588開發板】開發資料\09_系統外設功能測試\01_buildroot系統測試配套資料\02_4G模塊測試配套資料”目錄下。
iTOP-3588開發板上預留了一個4G /5G接口,可以連接迅為提供的 EM05-CE模塊(全網通4G模塊)。
首先準備一個 EM05-CE模塊連接到iTOP-3588開發板的 PCIE 接口上,然后準備一個 4G天線,接到 EM05-CE模塊的天線座上面,然后插入一張能聯網的 SIM 卡,如下圖所示:
然后進入到/topeet_test/03_4g/目錄下,如下圖所示:
然后執行以下命令運行連接腳本,如下圖所示:
./quectel-CM &
輸入命令“ifconfig”會有 wwan0 出現,如下圖所示:
然后輸入以下命令,ping一下百度的ip,可以看到已經能上網了,如下圖所示:
ping -I wwan0 www.baidu.com
如果發現只能 ping 通 IP 不能 ping 通網址,是因為 DNS 沒有設置對,在 etc 下有一個文件 resolv.conf。
vi resolv.conf
配置以下為可用的 DNS。
nameserver 8.8.8.8
nameserver 202.99.160.68
nameserver 221.130.33.52
nameserver 221.130.33.60
nameserver 192.168.1.1
nameserver 114.114.114.114
編輯完保存,即可發現可以 ping 通外網。
3.13 can測試
iTOP-3588開發板支持can接口,底板上can接口如下圖所示:
本次測試使用了 usbcan 調試分析儀作為測試設備,將 usbcan 調試分析儀通道一的 L 連到開發板的L, 將通道一的 H 連到開發板的H,如下圖所示:

輸入以下命令,查詢當前網絡設備,
ifconfig -a
輸入以下命令關閉CAN,
ip link set can0 down
輸入以下命令,設置 can0 仲裁段1M波特率,數據段3M波特率
ip link set can0 type can bitrate 1000000 dbitrate 3000000 fd on
輸入以下命令,打印can0信息,
ip -details link show can0
輸入以下命令打開 can0 通道,
ip link set can0 up
自此開發板的基礎配置就完成了,然后是模式的選擇。 首先將iTOP-3588開發板作為接收端,使用如下命令:
candump can0 &
然后在 PC 端 usbcan 的上位機發送數據
上位機的數據發送后,開發板的終端會收到相應的數據,
接下來將iTOP-3588開發板作為發送端,使用如下命令發送相應的數據:
cansend can0 123#DEADBEEF
然后在 usncan 的 Windows 上位機會返回如下信息:
至此,can功能測試完畢
3.14 SATA硬盤測試
iTOP-3588開發板使用SATA硬盤時需要用到SATA線和電源線(默認不提供,需要自行準備),注意: 為防止燒壞的情況發生,板子請先斷電再接上SATA硬盤。
iTOP-3588開發板連接硬盤如下圖所示:

硬件接好后,開發板上電,會產生對應的設備,使用相同的命令進行掛載即可。如果進入了圖形界面,系統會對硬盤自動進行掛載。
3.15 M2接口固態硬盤測試
磁盤驅動器的速度是以一個單位時間內讀寫數據量的多少來衡量的。DD 命令是一個簡單的命令行工具,它可用對磁盤進行任意數據塊的讀取和寫入,同時可以度量讀取寫入的速度。將會使用 DD 命令來測試 SSD 磁盤的讀取和寫入速度。
iTOP-3588開發板支持M.2接口的固態硬盤,這里以愛國者固態硬盤P2000為例,啟動前將固態硬盤插入 M.2 接口(在開發板的背面),
pci是一種總線,而通過pci總線連接的設備就是pci設備。PC上常用的設備很多都是采用pci總線,如:網卡、存儲等。輸入以下命令顯示所有的pci設備信息。
lspci
輸入以下命令查看生成的設備節點
ls /dev/nvme0*
輸入以下命令掛載固態,將固態硬盤掛載到/nvme/目錄下,掛載目錄可以隨意指定,如下圖所示:
mkdir nvme
mount /dev/nvme0n1 /nvme/
掛載完,如下圖所示:
3.16 HDMI測試
開發板支持HDMI接口,首先準備一個HDMI接口的屏幕,如下圖所示:
開發板上的hdmi接口如下圖所示,連接上下圖中的任意一個HDMI TX接口均可顯示:
然后使用購買開發板配套的hdmi線,將這倆接口連接起來,屏幕便可顯示。
如果將兩個HDMI 接口同時接上屏幕,默認會雙屏同顯。

3.17 按鍵測試
首先啟動開發板,通過調試串口登錄到開發板上,
然后在串口終端輸入“cat /proc/bus/input/devices”命令,查看Linux系統的輸入設備,
從上圖可以看到用戶按鍵的事件號是event2(如果有接觸摸屏,用戶按鍵的事件號有可能會是event3),然后在串口終端輸入“od -x /dev/input/event2”命令,接著按下開發板上的按鍵(VOL+或者VOL-或者HOME或者BACK),可以看到獲取到的按鍵上報數據(十六進制方式),
3.18 RTC時鐘測試
Linux系統下分為系統時鐘和硬件時鐘。分別使用 date 和 hwclock 命令查看。系統時鐘在系統斷電以后會丟失,硬件時鐘在有紐扣電池的情況下,系統斷電,時鐘不會丟失。在系統每次啟動的時候,系統時鐘會和硬件時鐘進行同步。
首先啟動開發板,通過調試串口登錄到開發板上,
查看系統時鐘在串口終端輸入“date”命令,
查看硬件時鐘,在串口輸入“hwclock -u”命令查看硬件時鐘,
也可以使用 date 命令來設置系統時間,例如置系統時間為2022 年 3月4號12:30:00,在串口終端輸入命令“date -s "2022-3-04 12:30:00"”,
然后使用“hwclock --systohc -u”命令把當前系統的時間同步到硬件時鐘里面,然后使用“hwclock -u”命令查看硬件時鐘。
3.19 UVC 攝像頭測試
iTOP-rk3588 支持 OV5695 MIPI 攝像頭,同時也支持 UVC 攝像頭。首先來測試一下UVC 攝像頭,將USB 攝像頭插入開發板,將自動安裝 uvc 驅動。
攝像頭識別檢測
v4l2-ctl --list-devices
由上圖可知,/dev/video21和22 為 USB 攝像頭節點
查看攝像頭支持的格式
v4l2-ctl --list-formats-ext -d /dev/video20
攝像頭采集格式查詢
v4l2-ctl -V -d /dev/video20
終端輸入“qcamera”,應用啟動后將自動顯示攝行頭拍攝畫面,
3.20 OV5695/OV13850攝像頭測試
開發板默認支持攝像頭接口。攝像頭接口是一個20PIN,間距為2.0mm的雙排插針,底板提供4個攝像頭接口,默認可以使用J1接口,連接的時候需要攝像頭朝向缺口處安裝。
迅為提供的OV5695攝像頭模塊
攝像頭識別檢測
v4l2-ctl --list-devices
由上圖可知,/dev/video11 為 USB 攝像頭節點
查看攝像頭支持的格式
v4l2-ctl --list-formats-ext -d /dev/video11
攝像頭采集格式查詢
v4l2-ctl -V -d /dev/video11
攝像頭圖像預覽
gst-launch-1.0 v4l2src device=/dev/video11 ! \video/x-raw,format=NV12,width=800,height=1280,framerate=30/1 ! autovideosink
也可以點擊桌面上的“qcamera”應用對攝像頭進行預覽,啟動后將自動顯示攝行頭拍攝畫面,
3.21 看門狗測試
看門狗是嵌入式系統中經常使用的功能,iTOP-3588中看門狗的設備節點為/dev/watchdog。
首先來到/topeet_test/04_watchdog目錄下,在該目錄中存放了看門狗的測試程序,
測試程序第一個參數為看門狗設備節點,第二個參數為看門狗重啟時間,輸入以下命令運行程序。
./watchdog /dev/watchdog 5
程序執行之后,程序會先啟動看門狗,然后喂狗,最后停止喂狗,開發板重啟。表明看門狗開啟喂狗,喂狗重啟功能都是正常的。
3.22 耳機測試
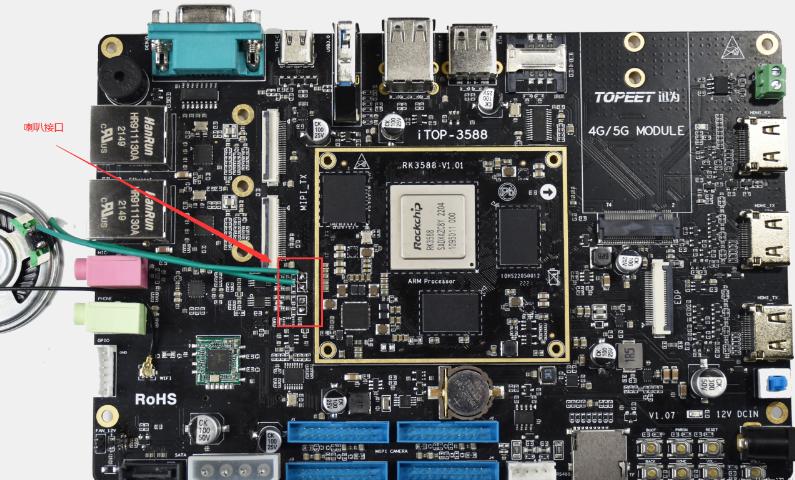
iTOP-3588開發板板載耳機接口,
測試音頻存放路徑為/topeet_test/05_headphone/,
輸入以下命令播放,可以聽到耳機里面發出聲音。
aplay 1.wav
3.23 麥克風測試
iTOP-3588開發板板載麥克風接口,如下圖所示,將麥克風連接到此接口。
輸入以下命令開始錄音,錄音時間為10秒鐘,保存為“test.wav”。
arecord -d 10 -f cd -r 44100 -c 2 -t wav test.wav
參數解析
-d 指定錄音的時長,單位時秒
-f 指定錄音格式
-r 指定了采樣率,單位時Hz
-c 指定channel 個數
-t 指定生成的文件格式
使用以下命令用耳機播放剛剛錄制的聲音,耳機會傳來剛剛錄制的聲音。
aplay test.wav
至此,聲卡、麥克風和耳機測試完畢。
3.24 喇叭測試
iTOP-3588開發板板載喇叭接口,如下圖所示,將喇叭接到此接口。
測試音頻仍舊使用/topeet_test/05_headphone目錄下的1.wav,
然后輸入以下命令播放,可以聽到喇叭里面發出聲音。
aplay 1.wav
3.25 屏幕背光調節
背光的亮度設置范圍為(0--255),255表示亮度最高,0表示關閉背光亮度。進入系統后在終端輸入如下命令進行背光測試。以下的測試命令適用于迅為的MIPI 7寸屏幕,LVDS7寸屏幕,LVDS10.1寸屏幕。
查看當前屏幕背光值
cat /sys/class/backlight/backlight/brightness
背光熄滅
echo 0 >/sys/class/backlight/backlight/brightness
3.26 EMMC測試
下面簡單測試 eMMC 的讀寫速度,以讀寫 ext4 文件系統為例。注意:為確保數據準確,請重啟開發板后測試讀取速度。
dd if=/dev/zero of=/test bs=1M count=500 conv=fsync//寫入測試
dd if=/test of=/dev/null bs=1000M //讀取測試
3.27 HDMI IN測試
注:主機不能同時接多個視頻線,且不能使用轉接頭。
將HDMI_RX與電腦端口連接,如下圖所示:
HDMI-IN 設備在內核中會被注冊為video設備,生成的節點如:/dev/video20,輸入以下命令查看hdmiin生成的設備節點:
v4l2-ctl --list-devices
打開桌面的Qt V4L2 test Utility應用,點擊左上角藍色文件夾圖標,選擇video20打開,
選擇打開后,點擊左上角綠色箭頭圖標即可開始運行,
運行后,即可顯示HDMI桌面。
3.28 NPU查詢
查詢NPU驅動版本
cat /sys/kernel/debug/rknpu/driver_version
查詢NPU利用率
cat /sys/kernel/debug/rknpu/load
查詢NPU電源狀態
cat /sys/kernel/debug/rknpu/power
打開/關閉NPU電源
echo on > /sys/kernel/debug/rknpu/power
echo off > /sys/kernel/debug/rknpu/power
3.29蜂鳴器測試
PWM 提供了用戶層的接口,在 /sys/class/pwm/ 節點下面,PWM 驅動加載成功后,會在 /sys/class/pwm/ 目錄下產生 pwmchipX 目錄,
設備樹中打開了3個 PWM,系統會將已經打開的 PWM 按照 PWM 編號順序放置在/sys/class/pwm 目錄,此處 pwmchip0 對應的是 PWM1,pwmchip1 對應 PWM12,pwmchip2 對應 PWM15,其中蜂鳴器使用的是PWM15 ,我們進入到 pwmchip2 目錄,
使用以下命令測試蜂鳴器:
echo 0 > /sys/class/pwm/pwmchip2/export
echo 366300 > /sys/class/pwm/pwmchip2/pwm0/period
echo 260000 > /sys/class/pwm/pwmchip2/pwm0/duty_cycle
echo 1 > /sys/class/pwm/pwmchip2/pwm0/enable //開啟
echo 0 > /sys/class/pwm/pwmchip2/pwm0/enable //關閉
修改第二句和第三句命令中的參數以修改 pwm 的占空比來控制蜂鳴器發出聲音的大小。
3.30 mpp測試
調用mpi_dec_test,解碼視頻,將h264轉為yuv,如下圖所示:
mpi_dec_test -i /oem/200frames_count.h264 -t 7 -n 250 -o /test.yuv -w 640 -h 480
使用命令tail -f /var/log/messages監控輸出,
調用mpi_enc_test,編碼視頻,將yuv轉為h264,
mpi_enc_test -i /test.yuv -t 7 -n 250 -o /test.h264 -w 640 -h 480 -fps 25
使用命令tail -f /var/log/messages監控輸出,
-
測試
+關注
關注
8文章
5269瀏覽量
126599 -
開發板
+關注
關注
25文章
5032瀏覽量
97371 -
RK3588
+關注
關注
6文章
325瀏覽量
4312
發布評論請先 登錄
相關推薦










 工商網監
工商網監
評論