 技術帖 | AM62x處理器SPI的詳解與應用
技術帖 | AM62x處理器SPI的詳解與應用
SPI(Serial Peripheral Interface)通信總線以其高速、全雙工、同步的特性而被廣泛應用,它只需要四根線就能實現數據傳輸,有效地節約了芯片管腳的數量,同時為PCB布局帶來了空間上的優化和便捷。正因為它簡單易用的特點,現在越來越多的芯片選擇集成SPI通信協議。
作為TI Sitara?產品線新一代MPU產品,TI AM62x處理器特別配備了多達4路的SPI接口以及1路OSPI接口(有時也稱為QSPI),豐富的SPI接口配置使得該處理器能夠同時與多個設備進行通信連接,大大提高了系統的擴展性和靈活性。
在飛凌嵌入式推出的搭載了AM62x處理器的OK6254-C開發板上,NOR Flash存儲器正是通過連接到處理器的OSPI總線上進行工作的。這樣的設計充分利用了SPI通信協議的高速傳輸和全雙工特性,保證了開發板在數據處理和存儲方面的效率。本文就通過OK6254-C開發板為大家介紹一下AM62x的SPI。

1、SPI的工作流程和時序
我們首先需要了解一下SPI是如何工作的——通常SPI通過4個引腳與外部器件相連:
(1) MISO:主設備輸入/從設備輸出引腳
該引腳在從模式下發送數據,在主模式下接收數據;
(2) MOSI:主設備輸出/從設備輸入引腳
該引腳在主模式下發送數據,在從模式下接收數據;
(3) CLK:串口時鐘
作為主設備的輸出,從設備的輸入;
(4) NSS:從設備選擇
這是一個可選的引腳,用來選擇從設備。
SPI的工作流程是這樣的:
(1) 主機先將NSS信號拉低,這樣保證開始接收數據;
(2) 當接收端檢測到時鐘的邊沿信號時,將立即讀取數據線上的信號,這樣就得到了一位數據;
(3) 由于時鐘是隨數據一起發送的,因此指定數據的傳輸速度并不重要,盡管設備將具有可以運行的最高速度;
(4) 主機發送到從機時,主機產生相應的時鐘信號,然后數據一位一位地將從MOSI信號線上進行發送到從機;
(5) 主機接收從機數據時,如果從機需要將數據發送回主機,則主機將繼續生成預定數量的時鐘信號,并且從機會將數據通過MISO信號線發送。
SPI工作時序圖如下:
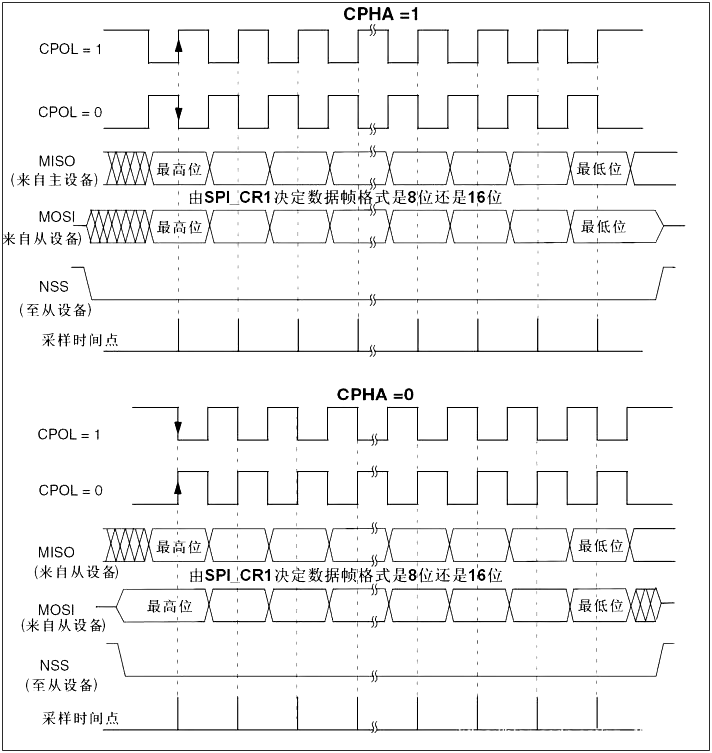
2、AM62x處理器中SPI總線的特點
在AM62x這款芯片中,TI將SPI的MISO與MOSI設計為d0和d1,具體哪一個作為輸入,哪一個作為輸出,是由設備樹中的 ti,pindir-d0-out-d1-in= <1>來設置的。
默認屬性值為0,即d0是輸入,d1是輸出;
當屬性值為1時,d0為輸出,d1為輸入。
3、AM62x的SPI應用
(1)menuconfig配置:
將該項選中,SPI驅動將編譯進內核中。
makemenuconfi
DeviceDrivers ->
SPIsupport ->
Usermode SPI device driver support
(注:在飛凌嵌入式OK6254-C開發板中,SPI驅動編譯已進去。)
(2)設備樹配置:
1) 選擇需要使用的spi,這里我們用spi0,節點為&main_spi0;
2) 將該節點所用的引腳復用為相應的功能。
spi0_pins_default: spi0-pins-default { pinctrl-single,pins = < AM62X_IOPAD(0x1B4, PIN_OUTPUT, 0) /* (A13) SPI0_CS0 */ AM62X_IOPAD(0x1B8, PIN_OUTPUT, 0) /* (C13) SPI0_CS1 */ AM62X_IOPAD(0x1C0, PIN_INPUT, 0) /* (B13) SPI0_D0 */ AM62X_IOPAD(0x1BC, PIN_OUTPUT, 0) /* (A14) SPI0_CLK */ AM62X_IOPAD(0x1C4, PIN_INPUT, 0) /* (B14) SPI0_D1 */ >; };
3) 描述節點的屬性,具體配置項的功能見注釋。
&main_spi0 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&spi0_pins_default>; /* 描述引腳復用節點 */ ti,spi-num-cs = <2>; /* 描述片選的數量 */ ti,pindir-d0-out-d1-in = <1>; /* 描述輸入輸出分別是哪個 */ /* 描述子節點spidev0設備 */ spidev@0 { spi-max-frequency = <24000000>; /* 描述spidev0設備的最大頻率 */ reg = <0>; /* 描述spidev0設備所用的片選,這里是第0個 */ spi-cs-high; /* 描述spidev0設備高有效 */ compatible = "rohm,dh2228fv"; /* 描述spidev0設備所用驅動 */ }; /* 描述子節點spidev1設備 */ spidev@1 { spi-max-frequency = <24000000>; reg = <1>; compatible = "rohm,dh2228fv"; }; };
(3)編譯燒錄:
在源碼路徑下輸入以下命令:
. build.sh
sudo ./build.sh kernel
沒有報錯即為編譯成功。
將源碼路徑下的image中的OK6254-C.dtb文件放到開發板的/boot目錄中,重啟開發板即可。
(4)SPI測試:
將spi0_D0和spi0_D1短接
重啟開發板后,在/dev目錄下看到多出兩個spidev設備。
使用我們的測試程序
fltest_spidev_test -D /dev/spidev3.0 -s 42000
有如下打印信息即為成功:
spimode: 0
bitsper word: 8
maxspeed: 42000 Hz (42 KHz)
FFFF FF FF FF FF
4000 00 00 00 95
FFFF FF FF FF FF
FFFF FF FF FF FF
FFFF FF FF FF FF
DEAD BE EF BA AD
F00D
4、總結
TI AM62x處理器有著豐富的SPI資源,而SPI又可以作為許多設備的總線,這使得AM62x能夠接入許多SPI接口的設備,因此在那些對SPI有著比較多需求的應用場景下,TI AM62x無疑是一個非常好的主控選擇。
-
ARM
+關注
關注
134文章
9084瀏覽量
367382 -
SPI
+關注
關注
17文章
1706瀏覽量
91502 -
嵌入式技術
+關注
關注
10文章
360瀏覽量
35840
發布評論請先 登錄
相關推薦
基于TI AM62x的SPI接口配置
TI AM62x處理器的SPI總線怎么用
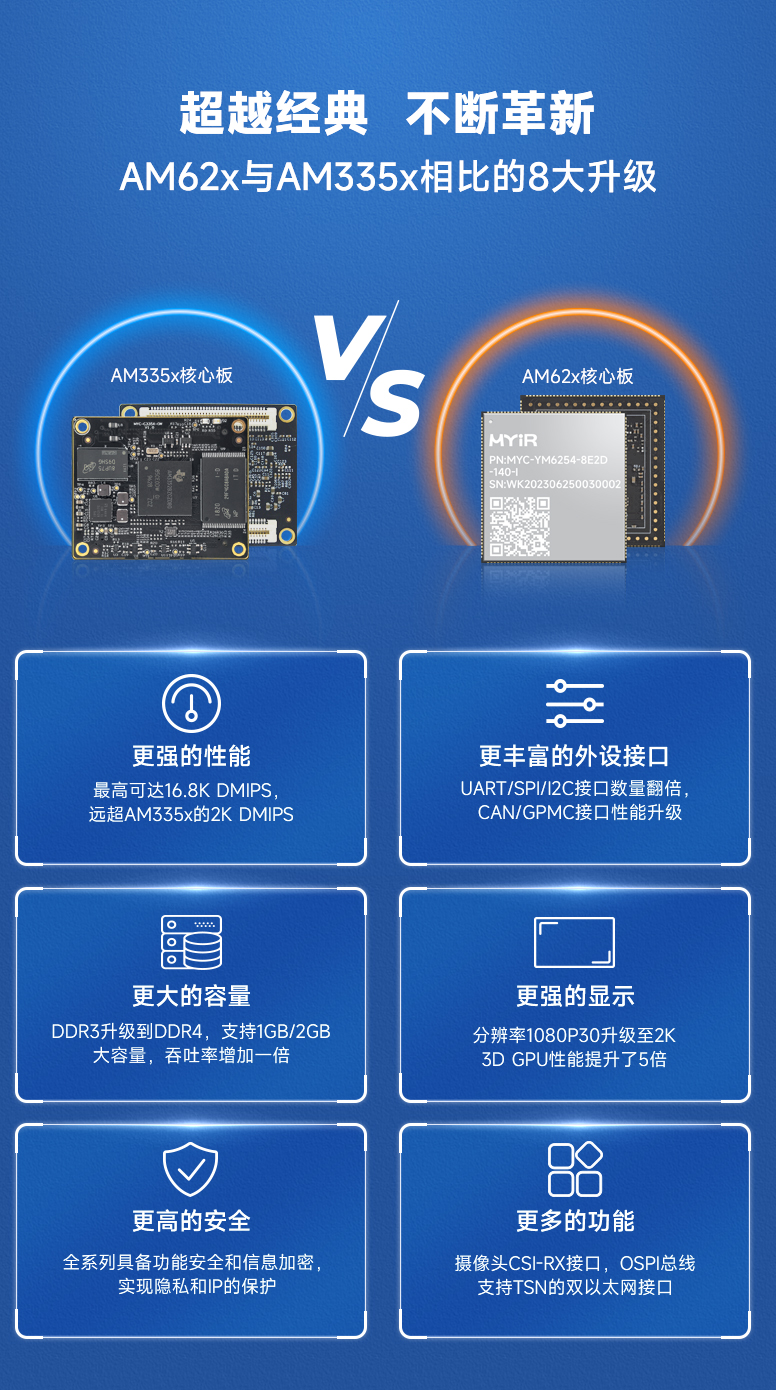
AM62x相比AM335x,到底升級了什么?

AM62x的SPI總線怎么用?讓我告訴你

TI AM62x接替AM335x,米爾核心板開發板

米爾AM62x核心板,高配價低,AM335x升級首選
沒搶到?米爾AM62x開發板限量5折又來了







 工商網監
工商網監
評論