


ROS作為機器人行業應用最廣泛的基礎架構之一,是很多用戶開發機器人應用的首選框架,如果要在基于ROS開發的系統中集成思嵐科技的機器人底盤或者SLAMKit建圖定位解決方案,有什么最便捷的方法呢?ROS SDK就是為此而生。本文將為您介紹ROS SDK的基礎架構、部署方法和應用示例。
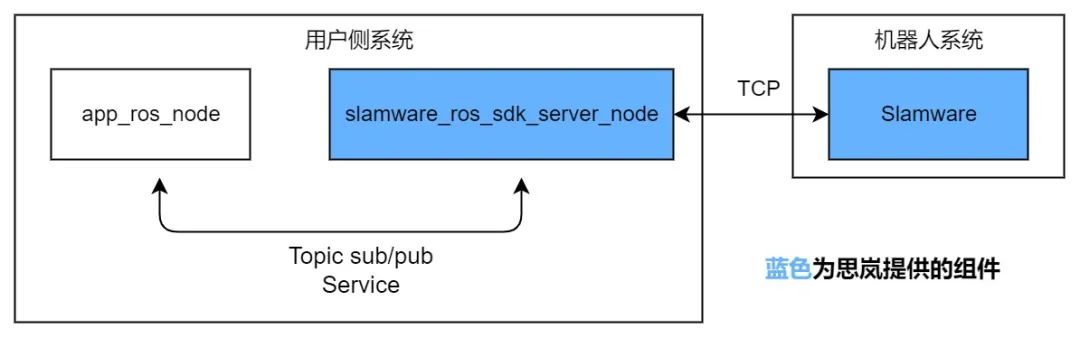
ROS SDK通過內部SDK連接機器人或SLAMKit軟件,并作為一個獨立的ROS節點運行。ROS SDK可發布標準的激光雷達、定位、地圖、傳感器數據等消息,同時訂閱設置機器人位姿、開始/暫停建圖、重定位、移動等控制命令。整體架構如下圖所示:
在本次Slamware ROS SDK 入門引導教程中,你將:
掌握如何下載和安裝相應版本的ROS SDK包
了解如何部署和開發SLAMWARE ROS SDK
了解相關的topic功能列表
開發環境需求
基于Ubuntu 16.04操作系統,并裝有ROS軟件包。
硬件需求
為使用ROS SDK,您需要一臺基于Slamware的移動機器人,開啟并配置合適的IP地址。slamware_ros_sdk_server_node節點啟動后將嘗試連接該機器人。
下載和安裝SDK
由于ROS和Ubuntu系統有較強的耦合性,且不同版本之間會存在兼容性問題,因此我們推薦用戶根據下表安裝對應的版本。
| Ubuntu系列版本 | ROS版本代號 | 默認GCC版本 |
| 16.04 | Kinetic | GCC5.4 |
| 18.04 | Melodic | GCC7 |
| 20.04 |
Noetic(ROS1) Foxy(ROS2) |
GCC9 |
我們提供的ROS SDK支持ROS1和ROS2,支持aarch64和x86_64雙平臺,以及不同的GCC版本,如下所示:
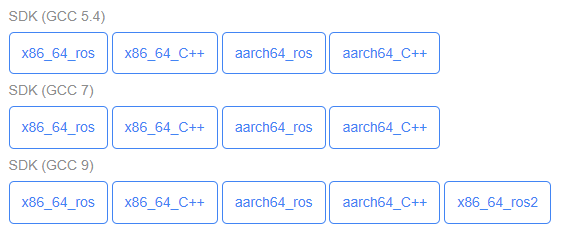
* 相關版本可至思嵐官網下載
Slamware ROS SDK包含了您開發過程中可能會用到的資源、代碼,其目錄結構組織如下:
| 目錄 | 說明 |
| docs | 參考文檔 |
| scr | 源碼 |
| --slamware_ros_sdk | ROS SDK源碼包 |
| --slamware_sdk | SDK相關頭文件與庫文件 |
部署和示例
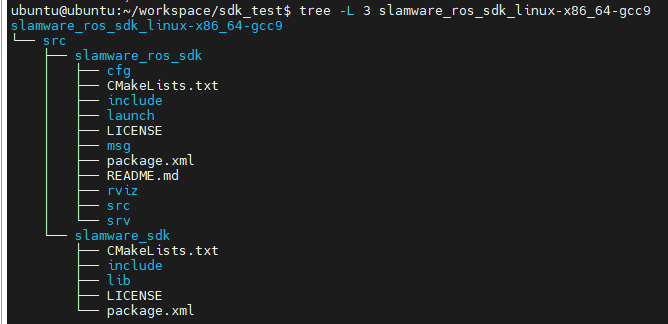
以x86_64平臺的Ubuntu20.04系統為例,將下載到的slamware_ros_sdk_linux-x86_64-gcc9.tar.gz解壓后的目錄結構如下:
1、編譯
進入slamware_ros_sdk_linux_x86_64_gcc9目錄,并執行cakin_make(ROS2則是colcon build)即可
2、配置工作空間系統環境
source devel/setup.bash
3、啟動節點
若移動機器人處于AP模式,連接機器人WIFI,啟動節點。
roslaunch slamware_ros_sdk slamware_ros_sdk_server_node.launch ip_address:=192.168.11.1
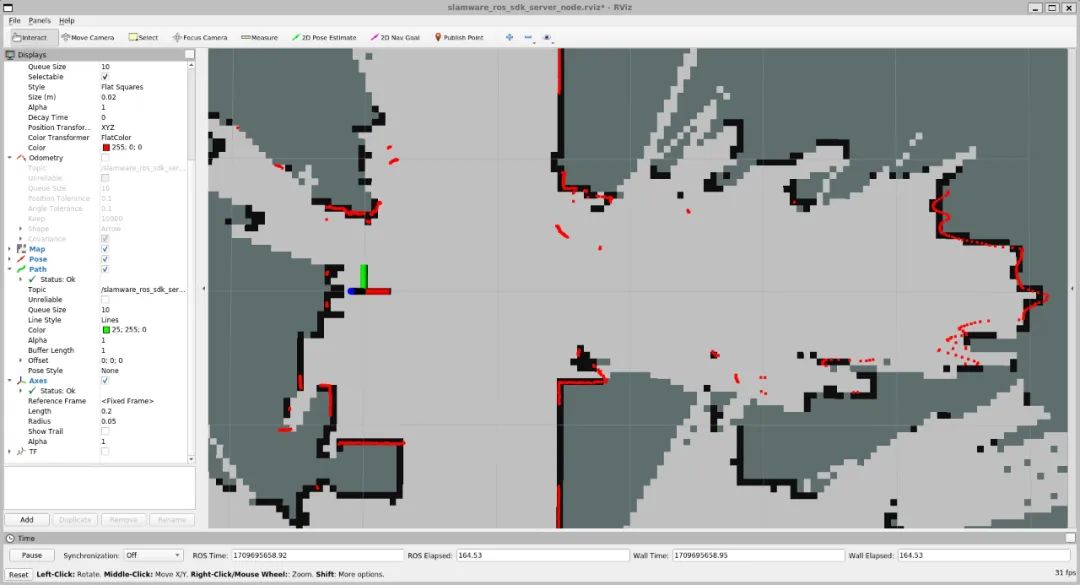
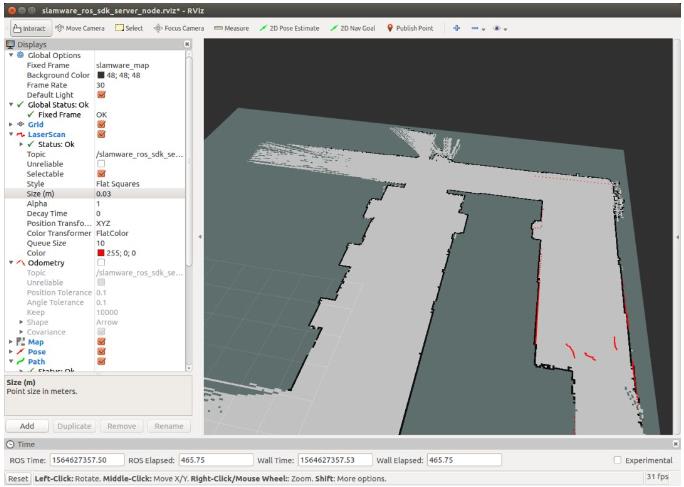
通過rviz查看機器人位姿、地圖和激光觀測。
roslaunch slamware_ros_sdk view_slamware_ros_sdk_server_node.launch
節點說明
|
點擊文末“ slamware_ros_sdk_server_node節點 |
發布地圖、機器人位姿與狀態信息,接收控制指令 |
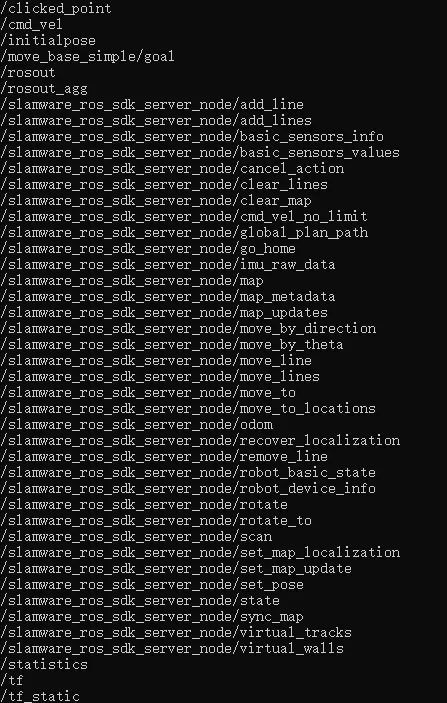
功能列表
相關topic列表如下:
審核編輯:劉清
-
傳感器
+關注
關注
2567文章
53080瀏覽量
768299 -
機器人
+關注
關注
213文章
29779瀏覽量
213203 -
激光雷達
+關注
關注
971文章
4241瀏覽量
193025 -
ROS
+關注
關注
1文章
288瀏覽量
17777 -
Ubuntu系統
+關注
關注
0文章
92瀏覽量
4315
原文標題:【教程】SLAMWARE ROS SDK 入門引導
文章出處:【微信號:slamtec-sh,微信公眾號:思嵐科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
在STM32上運行ROS節點——rosserial&stm32開發及調試方法 精選資料推薦
ROS簡介
搭建ARM+ROS的硬件載體之ROS的移植及測試方法
ESP8266 RTOS SDK的編程示例手冊資料免費下載
如何利用SLAMWARE ROS SDK進行機器人導航定位開發
SCR的調試方法以及示例程序介紹
ros驅動-架構及電機驅動和編碼器功能的實現

ROS基本介紹

ROS1的通信架構的基礎通信方式及相關概念

ROS/ROS 2 介紹
實現ARM+ROS(機器人操作系統)之運行ROS!

RV1103 開發板+SDK部署

ROS部署PaddlePaddle的CV模型

Unity與ROS鏈接介紹

在mmWave SDK增加QSPI Flash驅動的示例





 工商網監
工商網監

評論