") 攝像頭各標定參數(shù)的作用
攝像頭各標定參數(shù)的作用
生長之路往往風雨交加,真正的生長之美不在于人生最終的高度,而是生長的過程中,我們內(nèi)心能否保持足夠的沉靜,行動能否保持足夠的韌性。
攝像頭在生成一張圖片時,首先通過外參矩陣將世界坐標系中的點映射到攝像頭坐標系中。
然后,利用內(nèi)參矩陣將攝像頭坐標系中的點映射到相機坐標系中。
接著,應用畸變矩陣對相機坐標系中的點進行畸變校正,得到畸變后的點。
最后,根據(jù)畸變后的點在成像平面上的坐標,生成最終的圖像。
外參矩陣
外參矩陣:現(xiàn)實世界點P(世界坐標)是怎樣經(jīng)過旋轉(zhuǎn)R和平移t,然后落到另一個現(xiàn)實世界點(攝像機坐標系)上。 車載攝像頭的外參矩陣描述了攝像頭在世界坐標系中的位置和姿態(tài),主要包括旋轉(zhuǎn)矩陣-R和平移向量-t,用于將相機坐標轉(zhuǎn)換為世界坐標。外參矩陣通常表示為一個4x4的矩陣,記為,其中?R為3x3的旋轉(zhuǎn)矩陣,?t為3x1的平移向量。外參矩陣的一般形式如下:
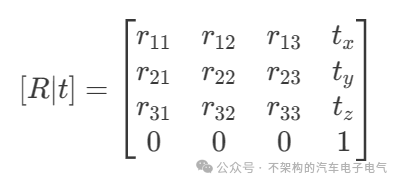
其中,rij表示的是旋轉(zhuǎn)矩陣的元素,tx,ty,tz,標示的是平移向量的分量。外參矩陣的作用是將相機坐標系(Xc,Yc,Zc)映射到世界坐標系(Xw,Yw,Zw)
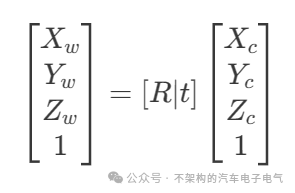
通過外參矩陣,可以實現(xiàn)相機坐標到世界坐標的轉(zhuǎn)換,為攝像頭在三維空間中的定位和姿態(tài)估計提供了基礎。
內(nèi)參矩陣 內(nèi)參矩陣:點P在2的基礎上,是如何繼續(xù)經(jīng)過攝像機的鏡頭、并通過針孔成像透視變換成為像素點(圖像坐標系);
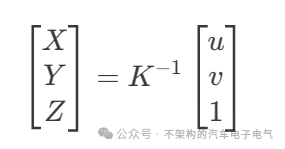
核心作用:通過內(nèi)參矩陣,可以實現(xiàn)像素坐標到相機坐標的轉(zhuǎn)換,為后續(xù)的攝像頭標定、三維重建等任務提供了基礎; 車載攝像頭的內(nèi)參矩陣描述了攝像頭的內(nèi)部特性,主要包括焦距、主點坐標等參數(shù),用于將像素坐標轉(zhuǎn)換為相機坐標。內(nèi)參矩陣通常表示為一個3x3的矩陣,記為?K,其一般形式如下:
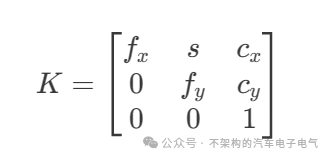
其中,??fx和fy表示相機的焦距,cx和cy表示主點的坐標,s表示可能的非正交性參數(shù)。內(nèi)參矩陣的作用是將像素坐標系(u,v)映射到相機坐標系(X,Y,Z)
畸變矩陣
畸變矩陣:上面那個像素點并沒有落在理論計算該落在的位置上,還tm產(chǎn)生了一定的偏移和變形!!!
車載攝像頭的畸變矩陣描述了攝像頭鏡頭造成的畸變,主要包括徑向畸變和切向畸變等參數(shù)。畸變矩陣的作用是對圖像進行畸變校正,使其更符合幾何規(guī)律,提高圖像的準確性和質(zhì)量。
具體來說,畸變矩陣可以對圖像中的畸變進行校正,包括以下兩種主要畸變:
畸變矩陣的形式一般如下:D=[k1 k2 p1 p2 k3]
其中,k1k2k3為徑向畸變參數(shù),p1 p2為切向畸變參數(shù)。
徑向畸變(Radial Distortion):由于鏡頭制造和裝配的不完美性,導致圖像中心和邊緣的像素位置發(fā)生偏差,表現(xiàn)為圖像中心的拉伸或壓縮效應,k1k2k3控制了鏡頭的徑向畸變,主要用來描述圖像中心附近的畸變情況,k1k2通常是主要的徑向畸變參數(shù),K3通常用于更精細的畸變校正
備注:當K1>0表示圖像的中心附近的像素位置被壓縮,造成的凸型畸變;當K1<0時,表示圖像中心附近的像素位置被拉伸,造成的凹型畸變;
切向畸變(Tangential Distortion):由于鏡頭和圖像平面之間的不平行或者不垂直造成的畸變。切向畸變可以通過畸變矩陣進行校正,使圖像中的水平和垂直線更加準確,用參數(shù)p1 p2表達;
通過對圖像進行畸變校正,可以提高后續(xù)圖像處理和計算的準確性,例如在目標檢測、跟蹤和三維重建等應用中,畸變矩陣的作用至關(guān)重要。
審核編輯:黃飛
-
攝像頭
+關(guān)注
關(guān)注
59文章
4836瀏覽量
95599 -
鏡頭
+關(guān)注
關(guān)注
2文章
506瀏覽量
25634 -
車載攝像頭
+關(guān)注
關(guān)注
5文章
137瀏覽量
28068
原文標題:一句話說清楚攝像頭各標定參數(shù)的作用
文章出處:【微信號:不架構(gòu)的汽車電子電氣,微信公眾號:不架構(gòu)的汽車電子電氣】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論