") 想做無人機(jī)編隊(duì)表演?需要掌握哪些?
想做無人機(jī)編隊(duì)表演?需要掌握哪些?
最近”低空經(jīng)濟(jì)“火了,嵌入式工程師應(yīng)該學(xué)習(xí)哪些技術(shù)棧才能做無人機(jī)編隊(duì)表演?
一、什么是無人機(jī)編隊(duì)表演?
 無人機(jī)編隊(duì)表演是一種通過多架無人機(jī)協(xié)同飛行和執(zhí)行各種精確動(dòng)作和編隊(duì)操作的表演形式。通過預(yù)先設(shè)定的程序或指令,無人機(jī)可以在空中進(jìn)行高度協(xié)調(diào)的動(dòng)作,如形成各種幾何圖形、變換編隊(duì)形態(tài)、展示精確的空中舞蹈等。這種表演形式通常需要高度的技術(shù)控制和精確的計(jì)劃,給觀眾帶來壯觀而令人驚嘆的視覺效果。無人機(jī)編隊(duì)表演在航空展覽、藝術(shù)演出、慶典活動(dòng)等各種場(chǎng)合中得到廣泛應(yīng)用,成為一種獨(dú)特的表演方式。
無人機(jī)編隊(duì)表演是一種通過多架無人機(jī)協(xié)同飛行和執(zhí)行各種精確動(dòng)作和編隊(duì)操作的表演形式。通過預(yù)先設(shè)定的程序或指令,無人機(jī)可以在空中進(jìn)行高度協(xié)調(diào)的動(dòng)作,如形成各種幾何圖形、變換編隊(duì)形態(tài)、展示精確的空中舞蹈等。這種表演形式通常需要高度的技術(shù)控制和精確的計(jì)劃,給觀眾帶來壯觀而令人驚嘆的視覺效果。無人機(jī)編隊(duì)表演在航空展覽、藝術(shù)演出、慶典活動(dòng)等各種場(chǎng)合中得到廣泛應(yīng)用,成為一種獨(dú)特的表演方式。
二、需要掌握哪些技術(shù)才可以做無人機(jī)編隊(duì)表演?
1、開源飛控 Pixhawk: Pixhawk是一個(gè)獨(dú)立的開源飛行控制器(飛控)硬件平臺(tái),用于控制無人機(jī)和其他無人車輛。它支持多種飛行模式,能夠與多種傳感器和通信模塊兼容,適用于從業(yè)余愛好者到專業(yè)應(yīng)用。
2、PX4: PX4是一套開源的飛行控制軟件,與Pixhawk飛控硬件緊密配合,提供了一套完整的無人機(jī)管理系統(tǒng),包括飛行控制、路徑規(guī)劃、傳感器集成和通信。PX4支持多種無人機(jī)類型和配置,是目前廣泛使用的飛控軟件之一。
3、RTK定位: RTK(Real-Time Kinematic)定位是一種高精度衛(wèi)星導(dǎo)航技術(shù)。利用固定基站(已知精確位置的地面站)和移動(dòng)站(無人機(jī)上的接收器)之間的信號(hào)差異,實(shí)時(shí)校正位置信息,以達(dá)到厘米級(jí)甚至毫米級(jí)的定位精度。這對(duì)于需要高度精準(zhǔn)控制的無人機(jī)編隊(duì)表演尤其重要。
4、2.4G傳輸: 2.4GHz傳輸是指使用2.4GHz無線電頻段進(jìn)行數(shù)據(jù)通信。這個(gè)頻段在無人機(jī)遙控、圖像傳輸?shù)确矫婧艹S茫驗(yàn)樗梢蕴峁┝己玫木嚯x覆蓋和穿透能力,同時(shí)也是全球多數(shù)地區(qū)都能免費(fèi)使用的頻段。
5、路徑規(guī)劃: 路徑規(guī)劃是無人機(jī)導(dǎo)航中的關(guān)鍵技術(shù),它涉及到如何根據(jù)當(dāng)前位置、目標(biāo)位置和環(huán)境信息計(jì)算出一條避開障礙物、消耗最少資源且安全的路徑。這對(duì)于無人機(jī)自主飛行和執(zhí)行復(fù)雜任務(wù)至關(guān)重要。
6、Blender 3.5 舞步設(shè)計(jì): Blender是一個(gè)開源且功能強(qiáng)大的3D建模和動(dòng)畫制作軟件。在無人機(jī)編隊(duì)表演中,Blender可以用來設(shè)計(jì)無人機(jī)的飛行路徑和編隊(duì)變換的“舞步”,模擬真實(shí)表演場(chǎng)景,幫助編排和預(yù)覽復(fù)雜的表演動(dòng)作。
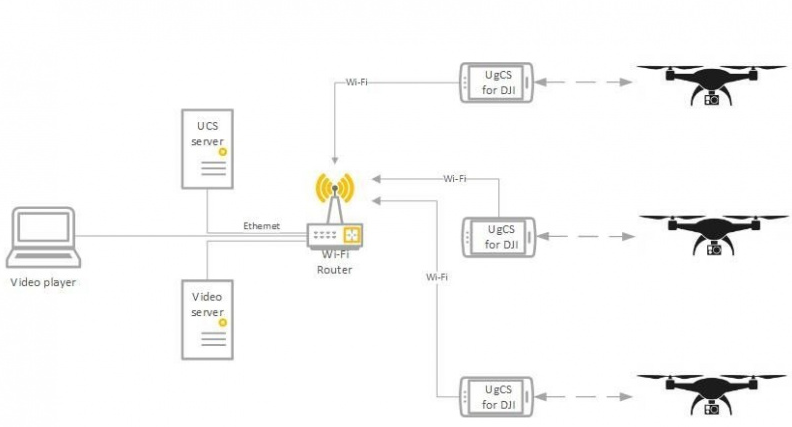
7、Mavlink無人機(jī)間通信、地面站與無人機(jī)通信: MAVLink(Micro Air Vehicle Link)是一種輕量級(jí)的通信協(xié)議,廣泛用于無人機(jī)(尤其是使用PX4和ArduPilot飛控的無人機(jī))和地面控制站之間的信息交換。它支持命令發(fā)送、數(shù)據(jù)流傳輸和遙測(cè)信息回傳,是無人機(jī)通信的標(biāo)準(zhǔn)之一。
-
控制器
+關(guān)注
關(guān)注
112文章
16332瀏覽量
177811 -
開源
+關(guān)注
關(guān)注
3文章
3309瀏覽量
42471 -
無人機(jī)
+關(guān)注
關(guān)注
229文章
10420瀏覽量
180137
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
在西安無人機(jī)編隊(duì)飛行表演的億航稱年入過億
無人機(jī)“軍演” 湘江上空上演精彩對(duì)抗賽
央視春晚已經(jīng)離不開無人機(jī)了
武漢無人機(jī)無人機(jī)比武演練,普宙O2當(dāng)裁判
【瘋殼·無人機(jī)教程2】開源編隊(duì)無人機(jī)-硬件資源簡(jiǎn)介
【瘋殼·無人機(jī)教程7】開源編隊(duì)無人機(jī)-地面站上位機(jī)的使用和介紹
怎樣使無人機(jī)安全飛行?無人機(jī)飛行需要掌握什么安全知識(shí)
耗資千萬的無人機(jī)表演秀成“亂舞”_無人機(jī)真的安全嗎?
無人機(jī)編隊(duì)飛行表演給大家?guī)砹瞬灰粯拥木?/a>
硬核炫酷的無人機(jī)編隊(duì)表演是如何做到的

多無人機(jī)協(xié)同編隊(duì)飛行控制的關(guān)鍵技術(shù)和發(fā)展展望

無人機(jī)編隊(duì)飛行表演 小學(xué)生也能設(shè)計(jì)的無人機(jī)編隊(duì)飛行表演
異構(gòu)無人機(jī)群編隊(duì)防御部署及評(píng)估研究綜述
基于RTK通訊設(shè)計(jì)GNSS無人機(jī)編隊(duì)表演方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論