


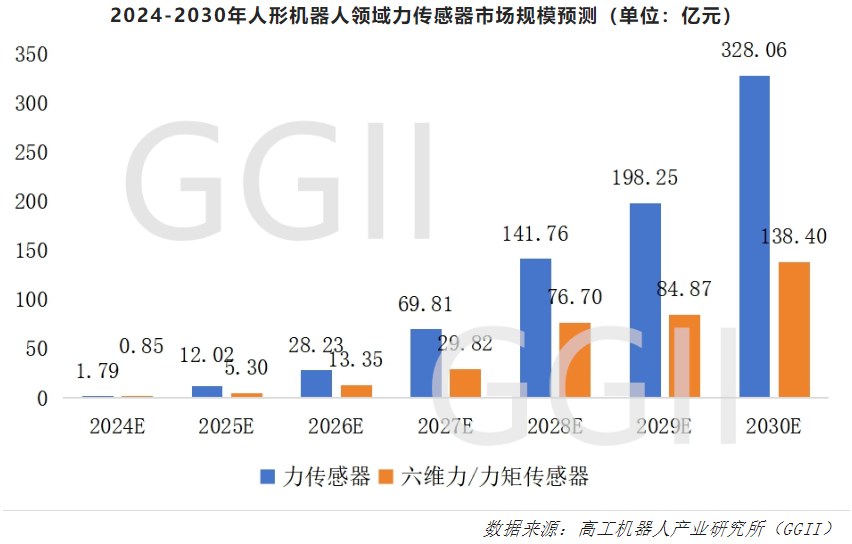
隨著人形機器人量產及商業化進程的推進,高工機器人產業研究所(GGII)預測,到2030年,全球人形機器人領域力傳感器市場規模將達328.06億元,其中人形機器人領域六維力傳感器市場規模將達138.40億元。
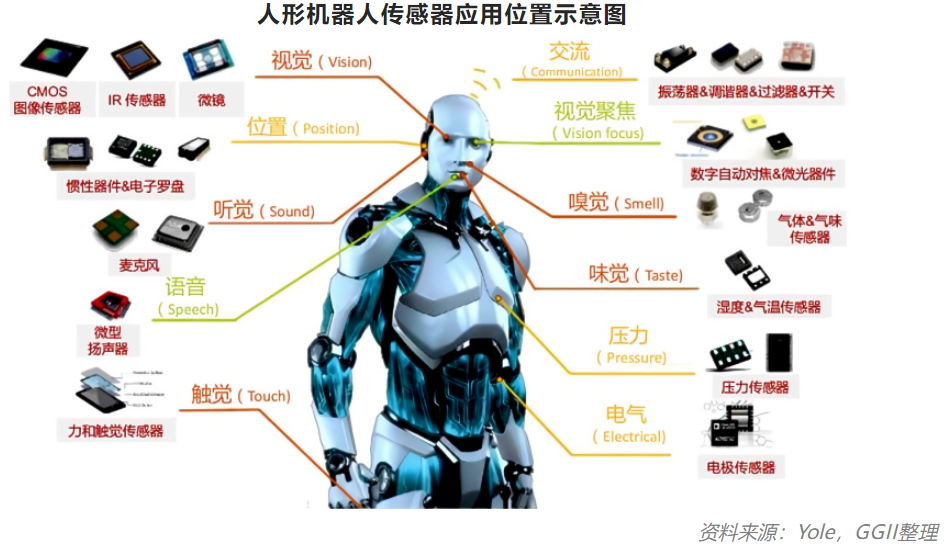
感知是人形機器人控制和執行的前提。感知層的傳感器是軟件控制和硬件零部件的橋梁,是物理世界與數字世界的接口,是實現具身智能的關鍵。
力傳感器作為其中一類,負責將力的量值轉換為相關電信號,可以檢測張力、壓力、重量、扭矩、應變和內應力等機械量。人形機器人常用的是維度最高的力矩傳感器——六維力傳感器(也稱:六維力矩傳感器)。
六維力傳感器能夠給出最為全面的力覺信息,同時,其在全方位機械過載保護、動態性能等領域技術壁壘也較高。
通過六維力傳感器來感知與工件之間的相互作用力,并將感知到的力信號反饋給控制系統,控制系統繼而根據感知到的力信號調整人形機器人的運動軌跡和力度,從而實現對力度的精確控制。
而事實上,究竟什么技術路線的六維力傳感器更適合人形機器人,業界仍在持續探索。
“誰”更合適?
技術路線探索
根據傳感元件的不同,六維力傳感器主要分為應變片式、光學式、壓電、電容式、MEMS硅原理等各種原理。
市場中技術成熟且應用較廣的是應變片式。應變片式通常采用的是硅應變片或金屬箔,本質是材料本身發生形變,進而轉化為阻值變化,具有精度高、測量范圍廣、成本低、高頻響特性好等特點。
那么,應變片式是最適合人形機器人的六維力傳感器嗎?
“應變片式六維力傳感器可以滿足人形機器人手腕的應用需求,但對于腳踝而言,顯得有些力不勝任,并不是最合適的技術路線。”鑫精誠傳感器董事長吳浩在接受高工機器人調研時表示。
應變片式所存在的問題主要表現為長期可靠性不足。由于應變片式是膠水粘貼的工藝,采用該技術路線的六維力傳感器避免不了存在膠水氧化老化后的零點漂移,溫度漂移、蠕變等問題。吳浩表示,從原理上來看這基本上是無解的。但對于人形機器人的腳踝而言,六維力傳感器的長期可靠性是不能作讓步的核心性能。
除此之外,高剛性和抗過載能力也是考核六維力傳感器是否能夠滿足人形機器人的核心性能。
人類的踝關節為重要承重關節,數據顯示,步行時足部承重是體重的1.5倍。就像人的踝關節一樣,人形機器人的腳踝同樣需要承受超出其自身的重量。以特斯拉展示的第二代人形機器人Optimus為例,該人形機器人的身高為1.8米,重量為57KG,相對應其腳踝所需要承受的重量或將超過57KG。
如上文所言,同時需要兼具高剛性、強大的抗過載能力和溫度靈敏度漂移控制能力,以及長期可靠性,那么究竟什么技術路線的六維力傳感器會比應變片式更適合人形機器人應用呢?
圍繞這個問題,鑫精誠傳感器展開了多技術路線的研發探索,并已有收獲,于近期推出了兩大系列不同方向的六維力傳感器產品,分別是壓電六維力傳感器和MEMS原理關節力矩傳感器。
壓電六維力傳感器
更貼合人形機器人腳踝應用要求
壓電式技術路線的特點是:高剛性、高靈敏度、無零點漂移、不受溫度變化影響,理論上無限次使用壽命。壓電式無需外加電源,也不需要膠水粘貼工藝,不存在應變片式的膠水氧化老化等問題。
由于壓電式六維力傳感器技術難度高,目前市場應用仍以瑞士Kistler等國外品牌為主。反觀國內,多數企業尚未布局,或正處于研發、驗證等階段。如今,鑫精誠傳感器已攻破這項技術,實現了壓電式六維力傳感器的自研自產。
鑫精誠傳感器所研發的壓電六維力傳感器采用壓電石英晶體原理,是一款已預壓的六維力傳感器,可用于測量三個正交方向的力(Fx,Fy,Fz)和力矩(Mx,My,Mz),所有的方向的力和力矩信號由單獨的壓電晶體感應并輸出。
鑫精誠傳感器推出的壓電六維力傳感器具備高剛性、高穩定性、低溫漂、低零飄、長期可靠性好、抗過載能力強(≤120%)、工作溫度范圍廣、使用壽命長、固有頻率高、上下雙法蘭連接、極低的閾值、使用壽命過億次、IP等級高等優勢,更加貼合人形機器人腳踝處的應用需求。
具體來看,該產品的溫度靈敏度漂移(≤0.05%F.S/℃)較應變片式表現更好,且工作溫度范圍較廣(-40-120℃),尤其能夠滿足通用型人形機器人應用。此外在產品設計上,鑫精誠傳感器的壓電六維力傳感器結構緊湊,即便在非常狹小的空間內,也可以完成力/力矩的動態或準靜態測量。
關于它的剛性和靈敏度,吳浩舉例表示:“壓電六維力傳感器可以非常好的兼顧剛性和靈敏度,它既能準確測量卡車的重量,又同時能分辨出駕駛員吐出的口香糖的重量。”
對動態力測試應用,石英壓電測力傳感器具有很多優點和獨特的特性,成為動態力測量的最好的選擇。但是它的保壓性能不好,在靜態力測量方面的能力略顯不足。
石英壓電測力傳感器產生的測量信號將隨時間衰減,不適合做長周期、靜態測量,因此不能用于靜力測量的應變式稱重傳感器做互換。舉一個通俗的例子:放十個砝碼時壓電傳感器當即可以測量,但是靜置一段時間后就測不出來了。除此之外,壓電式力傳感器的精度表現并不如應變片式高。
“但這兩個方面的不足并不影響它在人形機器人中的應用效果。從理論上來說,人形機器人不停地在運動,測的是動態力。另外,人形機器人對六維力傳感器的要求主要是重復性和長期穩定性,而并非要有多高的精度。”吳浩表示。
MEMS原理關節力矩傳感器
適用于協作機器人和人形機器人
除壓電六維力傳感器之外,鑫精誠傳感器還圍繞MEMS硅原理開發了適用于協作機器人和人形機器人的MEMS原理關節力矩傳感器。
據悉,鑫精誠傳感器研發的MEMS原理關節力矩傳感器具有高剛性、抗沖擊能力強、零點漂移小、抗彎矩能力強、正反向對稱性好、受徑向力影響、物理帶寬高1000HZ 以上、全溫度范圍補償、靈敏度更高等特點。
綜合來看,該力矩傳感器可以適應機器人的碰撞、跳躍等沖擊,不會損壞傳感器,不會產生零點漂移,可以實現自動化生產,產品質量、可靠性、一致性更可靠。
“讓客戶更放心、更安心、更安全,MEMS原理關節力矩傳感器具有極致性價比,有利于人形機器人行業早日量產。”吳浩表示。此外,其擁有獨有的交叉載荷影響自補償技術,使得交叉載荷的對扭矩的信號影響小。
該MEMS原理關節力矩傳感器同樣無需膠水粘貼,采用硅微熔技術。且它與壓電六維力傳感器一樣,在過載能力、溫度靈敏度漂移、長期可靠性、剛性、一致性等方面均表現突出。
吳浩更是直言,采用該技術路線的MEMS原理關節力矩傳感器在多項性能上都比應變片式好10倍,尤其靈敏度是應變片式的20倍。
協作機器人通常采用的六維力傳感器方案有兩種:一種是安裝在協作臂末端;另外一種是安裝在每個關節處。每個關節處需要用到1個關節扭矩傳感器,1臺協作機器人則總共需要6個或7個,取決于關節數量。
而對于人形機器人而言,其所需的MEMS原理關節力矩傳感器數量則取決于本體自身的設計方案。以特斯拉展示的第二代人形機器人Optimus為例,其共有40個關節,每個關節安裝一個力矩傳感器,總共需要40個MEMS原理關節力矩傳感器。
從生產角度來看,據吳浩介紹,該技術路線的MEMS原理關節力矩傳感器對自動化生產的要求高,因此前期需要投入的設備及產線成本較高。但從另一個角度來看,當量起來了,進入規模化生產后,該產品的成本反而會比應變片式更低。
“新品MEMS原理力矩傳感器即將發布。經過嚴格測試和優化,這款革命性的新型傳感器使用MEMS原理為基礎,創新性地改進了力矩測量方案,從而實現了高精度和高效率。在我們努力創新的同時,我們保持對質量的承諾,提供最適合客戶需求的產品。”吳浩說道。
遠望“人形”等風來,腳踏實地干實事
在人形機器人領域,鑫精誠傳感器早已有所布局,不僅有對應的產品開發,而且已經給行業頭部的多家人形機器人企業打樣合作中。值得一提的是,鑫精誠傳感器已實現全自動化生產,可做到保證品質的批量交付。
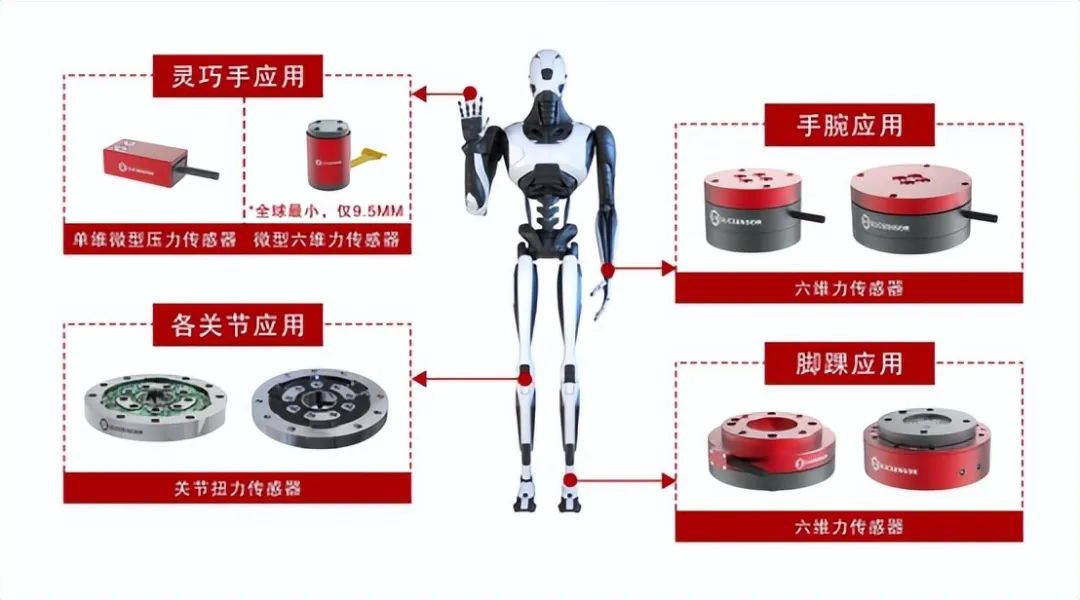
圖片來源:鑫精誠傳感器
但吳浩表示,人形機器人只是公司未來5-10年甚至更加長遠的增長點,近三年內的主要增長點將主要來自工業機器人和協作機器人領域,以及焊接和精密裝配領域。
其中在協作機器人方面,2023年鑫精誠傳感器已陸續給大族機器人、遨博智能、法奧意威、長廣溪智能、越疆機器人等頭部廠商打樣。其主要配合協作機器人,針對焊接環節進行拖拽示教,完成焊接軌跡規劃。
在產品研發方面,鑫精誠傳感器一直以來都堅持“多技術路線”創新開發。吳浩表示,公司的研發團隊年輕且學習能力強,以壓電六維力傳感器為例,從研發到落地僅花了6個月。
當前,鑫精誠傳感器的六維力傳感器產品直徑跨度覆蓋9.5mm-300mm,力量程跨度從5N到50KN,力矩量程跨度從0.1N.m到1000N.m,可覆蓋大部分應用領域。其產品結構包括中空式,法蘭式,IP68防水、微型式、自帶緊固螺釘式等,幾乎覆蓋了常規六維力傳感器的所有結構。
未來,鑫精誠傳感器將繼續專注力學原理傳感器的開發,攻克高精度、小體積、低成本、集成化、智能型的高端力學傳感器。
2024年4月18日,鑫精誠傳感器將參加由高工移動機器人、高工機器人產業研究所(GGII)舉辦的2024中國人形機器人技術應用峰會,并作為參編單位在現場共同見證《人形機器人產業發展藍皮書》的首發儀式。
審核編輯:劉清
-
過載保護
+關注
關注
1文章
149瀏覽量
12858 -
力傳感器
+關注
關注
0文章
149瀏覽量
15529 -
電信號
+關注
關注
1文章
842瀏覽量
21050 -
人形機器人
+關注
關注
7文章
712瀏覽量
17558
原文標題:掘金超百億級市場,力傳感器行業“翹楚”的前瞻探索
文章出處:【微信號:gaogongrobot,微信公眾號:高工機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
中國傳感器市場規模約1640億元年化增長在15%以上,5大人形機器人傳感器市場分析

中國傳感器市場規模突破4000億!工信部產業研究院最新數據出爐
存儲芯片方案發力,率先適配宇樹、智元機器人
人形機器人核心配件之六維力傳感器
一文讀懂德州儀器的人形機器人電機驅動和傳感布局

漢威科技助力:傳感器技術為人形機器人打造智能感知新生態

A股上市公司凱爾達宣布控股六維力傳感器企業 布局人形機器人關鍵核心部件
成立15年,鑫精誠這家深圳傳感器公司獲億元天使融資(六維力傳感器這條賽道真火)

今年中國人形機器人市場規模將達27.6億元
無人叉車的市場規模怎么樣?適合使用agv的企業有哪些共同點?









 工商網監
工商網監

評論