 運動控制器/運動控制卡配套ZCAN總線ZIO模塊的使用
運動控制器/運動控制卡配套ZCAN總線ZIO模塊的使用
ZMC408CE硬件介紹
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應用于各種需要脫機或聯機運行的場合。
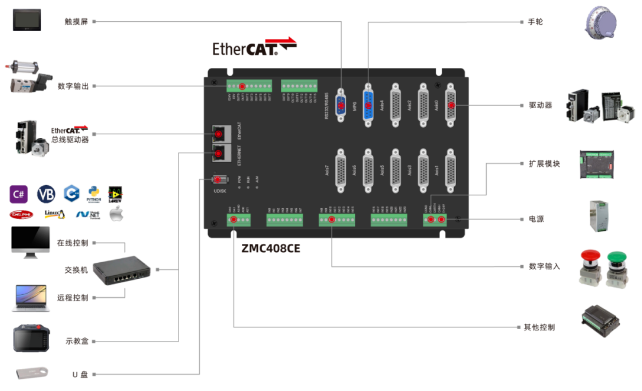
ZMC408CE支持8軸運動控制,最多可擴展至32軸,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨等功能。
ZMC408CE支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

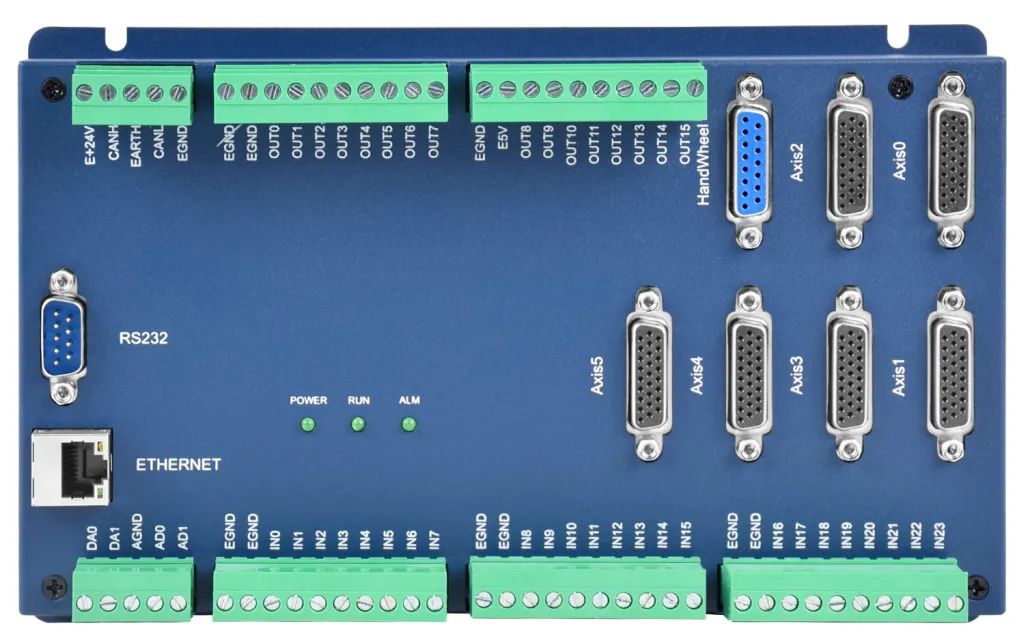
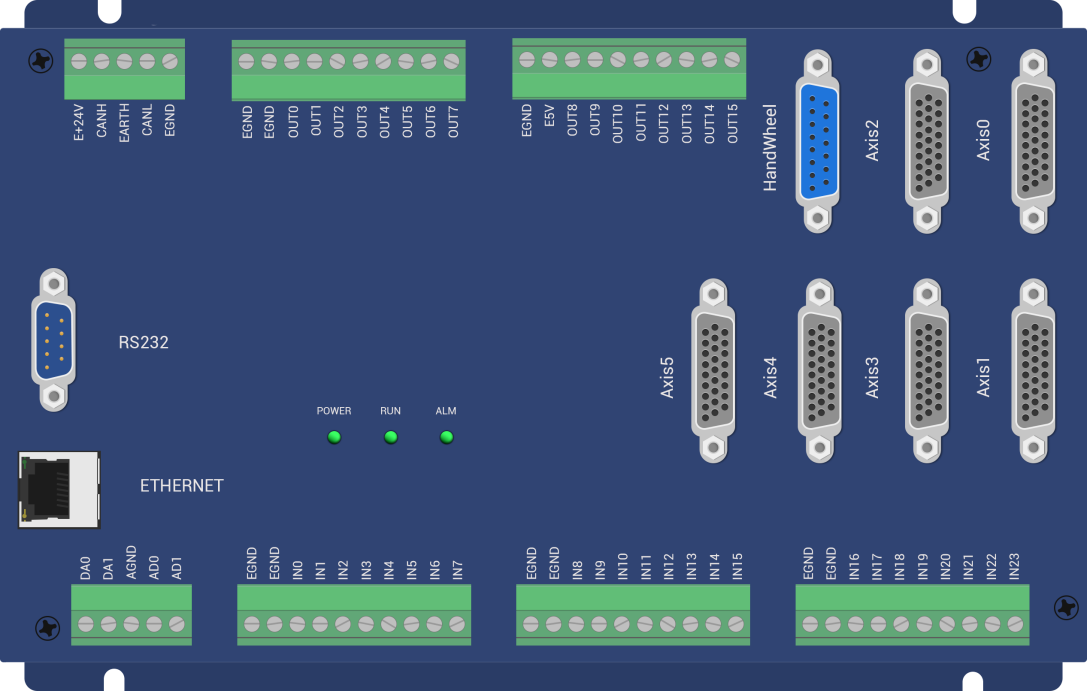
ZMC408CE支持8軸運動控制,可采用脈沖軸(帶編碼器反饋)或EtherCAT總線軸,通用IO包含24路輸入口和16路輸出口,部分IO為高速IO,模擬量AD/DA各兩路,EtherCAT最快125us的刷新周期。
ZMC408CE支持8個通道的硬件比較輸出、硬件定時器、運動中精準輸出,還支持8通道PWM輸出,對應的輸出口為OUT0-7,支持8個通道同時觸發硬件比較輸出。
01 ZCAN擴展模塊
ZCAN總線擴展模塊包含兩個系列:ZCAN擴展模塊和ZMIO310-CAN擴展模塊,今天我們主要來介紹一下ZCAN擴展模塊。
ZCAN擴展模塊種類豐富,具體有如下型號。

02 ZCAN擴展模塊的接線
1、CAN總線上連接了多個CAN通訊模塊時,將全部CAN的CANL和CANH端口分別接到一起(CANL接CANL、CANH接CANH)。
2、在CAN總線最兩端接口各并接一個120歐的終端電阻,匹配電路阻抗,保證通訊穩定性。(控制器/控制卡這一端需要在CANL和CANH之間接入一個120歐電阻,還有最后一個CAN擴展模塊的撥碼開關來并入一個120歐姆的電阻)。
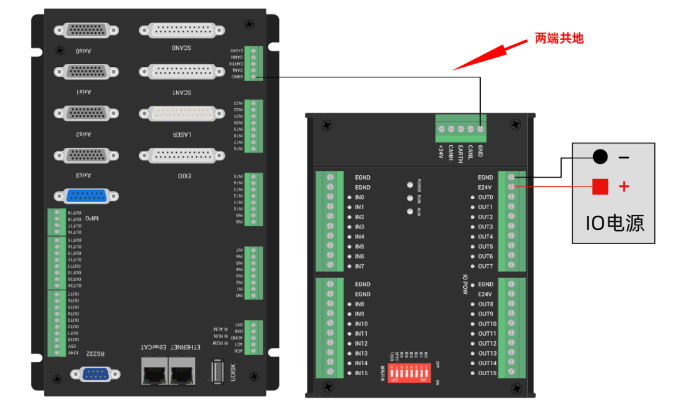
3、要保證控制器的主電源的公共端和CAN擴展模塊的主電源的公共端接到一起端(俗稱“共零”),以防止CAN芯片燒壞。
4、干擾嚴重的場合(正常接線重啟后ZCAN擴展板的ALM燈一直亮著),要將通訊線替換成雙絞屏蔽線,屏蔽層可靠接地。
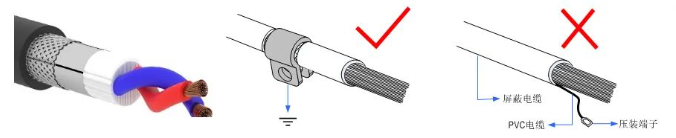
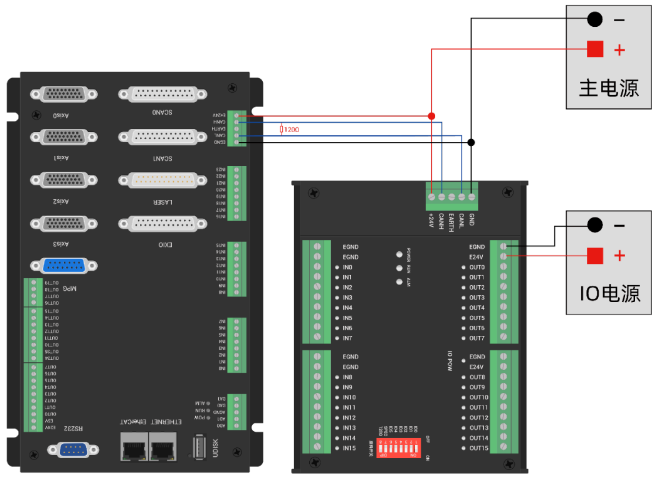
5、ZIO系列擴展模塊均采用雙電源供電,擴展板的主電源和IO單電源使用兩個電源分別供電,這樣可以防止IO的干擾傳給ZCAN擴展模塊的主電源影響通訊。
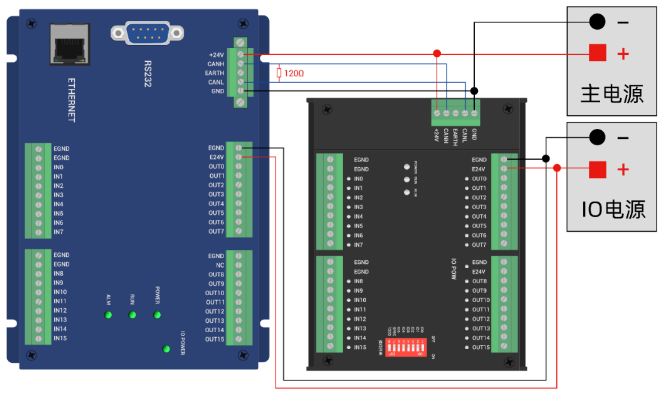
ZAIO模擬量擴展模塊采用單電源供電,只需要主電源,IO不需要單獨供電。
6、布線還要注意強電和弱電布線要拉開距離,建議20cm以上。
單電源控制器和擴展模塊接線參考
雙電源控制器和擴展模塊接線參考
03 ZCAN擴展模塊的撥碼設置

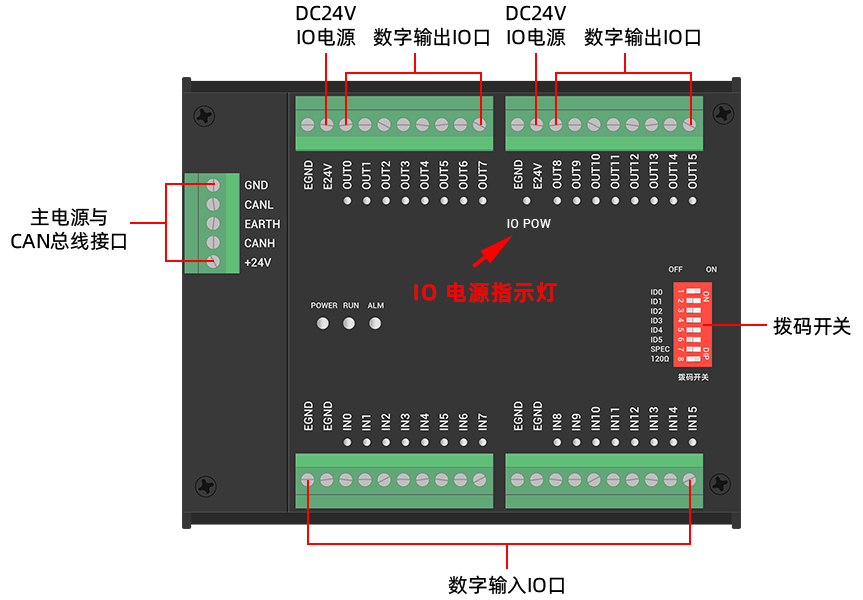
說到ZCAN擴展模塊的撥碼設置,我們先來了解一下撥碼開關,每塊ZCAN擴展板都有一個紅色的撥碼開關,撥碼開關具體含義如下。
1、撥碼1-4
4位CAN ID(CAN撥碼地址)用于ZCAN擴展模塊IO地址映射,4位二進制位組合值對應值范圍0-15,控制器根據CAN撥碼地址來設定對應擴展模塊的IO起始地址及AD與DA的起始地址。
不同二進制位組合值對應數字量IO起始編號分配情況如下表。
注:整個控制系統的IO編號不得重復,映射資源時需避開已有編號。

不同二進制位組合值對應AD與DA的起始地址分配情況如下表。1-4位撥碼狀態與對應地址ID可參考上表。

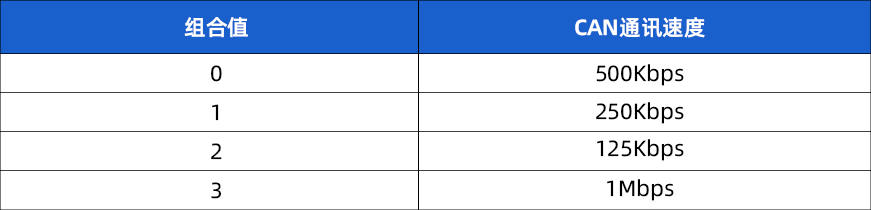
2、撥碼5-6
CAN通訊速度,組合值對應值范圍0-3,可選四種不同的速度,一般CAN通訊速度默認即可,干擾嚴重可以降低CAN的通訊速度,同時需要通過控制器端通過CANIO_ADDRESS指令來修改控制器端(主端)的CAN通訊速度與ZCAN擴展模塊一致才可以正常通訊。
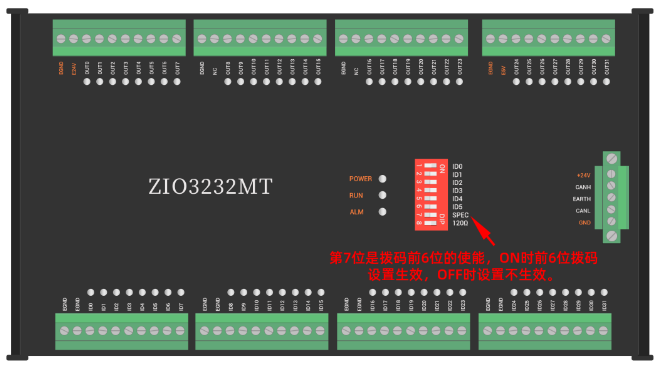
3、撥碼7
特殊功能預留(ZIO3232MT第7位是撥碼前6位的使能,ON時前6位撥碼設置生效,OFF時設置不生效);
4、撥碼8
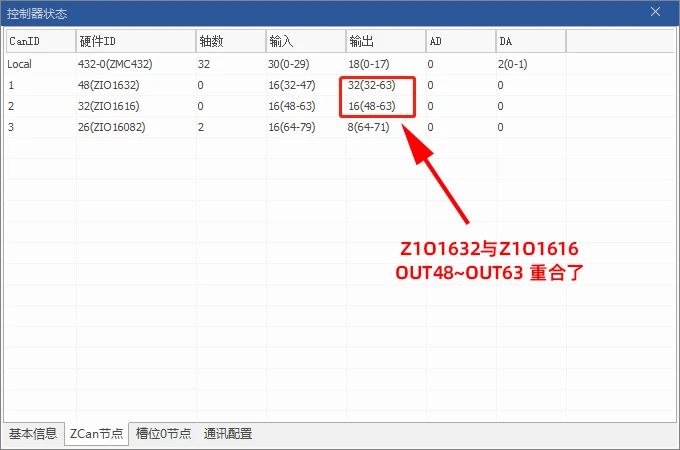
120歐電阻,撥ON表示CANL和CANH間并聯接入一個120歐電阻,連接了多個CAN通訊模塊時只需要把最后一個CAN通訊模塊的第8位撥為ON即可。(1)CAN撥碼地址的設置,要求整個控制系統的IO 編號不得重復,控制器端本地IO地址的范圍可以通過RTSys軟件點擊【控制器】-【控制器狀態】-【Zcan節點】查看相關信息。
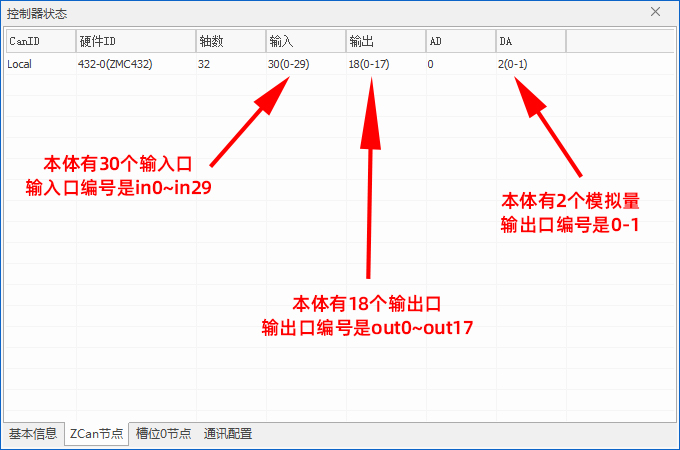
上圖是ZMC432控制器的本地數字量IO與模擬量IO的分部情況,針對擴展數字量IO的ZCAN擴展模塊,我們需要要求ZCAN擴展板的IO起始地址要大于輸入口編號的最大值29,同時大于輸出口編號的最大值17,查數字量IO組合值對照表得CAN地址撥碼的組合值要大于等于1。(2)CAN通訊速度。一般默認即可,都撥到OFF,此時默認的波特率為500kbps。
(3)特殊功能預留,一般撥到OFF (ZIO3232MT第7位要撥到ON)。
(4)最后一個CAN擴展模塊第8位要撥到ON,把末端的120歐匹配電阻加入CAN網絡。
完成CAN擴展模塊的接線和撥碼開關的設置后需要把控制器和擴展模塊斷電重啟后生效。
04 ZCAN擴展模塊功能驗證
1、斷電重啟后,觀察ZCAN擴展模塊的ALM是否熄滅,擴展模塊如果和主端控制器正常通訊上的話,ZCAN擴展模塊的燈應該是Power[亮]、Run[亮]、Alarm/ALM[滅](下圖ALM燈亮表示異常)。
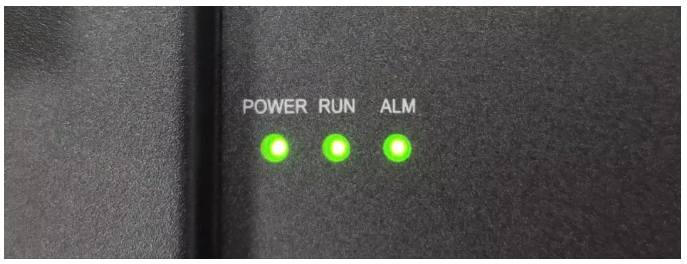
IO的電源是否正常。(下圖IOPOW燈亮表示IO供電正常)。

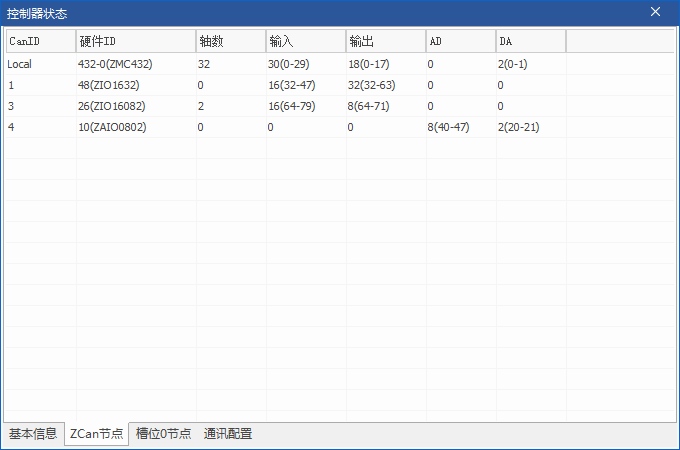
2、通過RTSys軟件點擊【控制器】-【控制器狀態】-【Zcan節點】可查看到各個ZCAN擴展模塊的IO起始編號等信息。
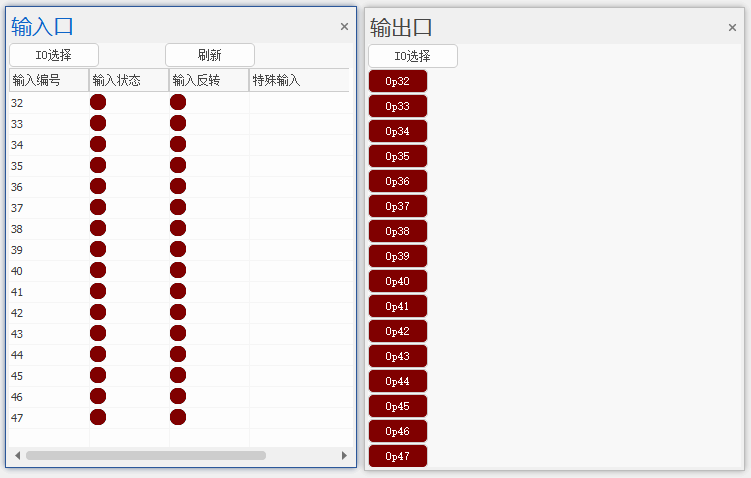
3、ZCAN擴展板IO口監控。RTSys軟件點擊【工具】-【輸入口/輸出口】-【IO選擇】,即可監控對應IO口的IO信息。
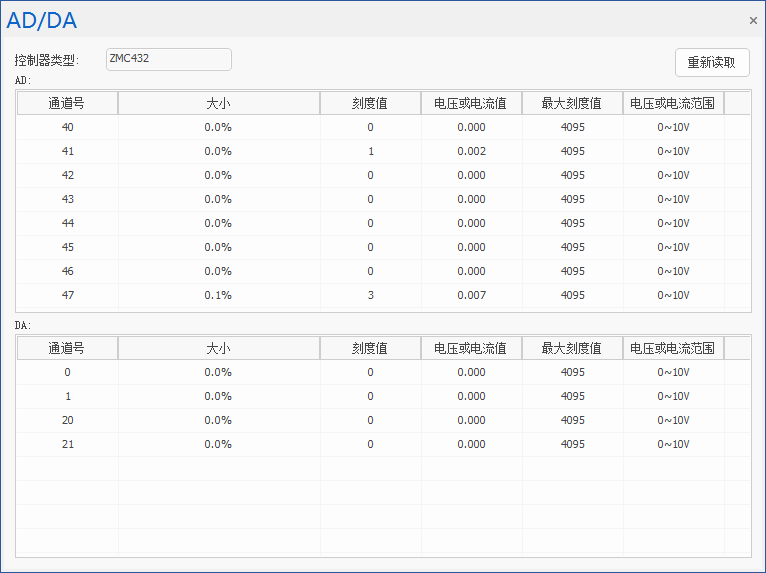
4、ZCAN擴展板模擬量監控。RTSys軟件點擊【工具】-【AD/DA】;即可監控對應的模擬量輸入輸出口的相關信息,ZAIO0802擴展模塊的模擬量輸入與輸出都是12位的,所以最大刻度值檔位要手動選擇4095。
5、ZCAN擴展軸的測試。CAN總線擴展方式擴展脈沖軸時,可選ZIO16082,擴展兩個脈沖軸。擴展軸需要進行軸映射的操作,采用AXIS_ADDRESS指令映射,映射規則如下。
AXIS_ADDRESS(軸號)=(32*0)+ID '擴展板的本地軸接口0 AXIS_ADDRESS(軸號)=(32*1)+ID '擴展板的本地軸接口1
ID為擴展板1-4位地址撥碼的組合值。映射完成后設置ATYPE等軸參數后就可以使用擴展軸。
ATYPE(6)=0 '設為虛擬軸 '軸6映射到ZCAN擴展模塊ID為2的擴展板的軸接口1上 AXIS_ADDRESS (6)=2+(32*1) ATYPE(6)=8 'ZCAN擴展軸類型的脈沖軸 '一般脈沖當量設置為電機運動1mm或1度需要的脈沖數 UNITS(6)=100 '脈沖當量100 SPEED(6)=100 '速度100units/s ACCEL(6)=1000 '加速度1000units/s^2 DECEL(6)=1000 '減速度1000units/s^2
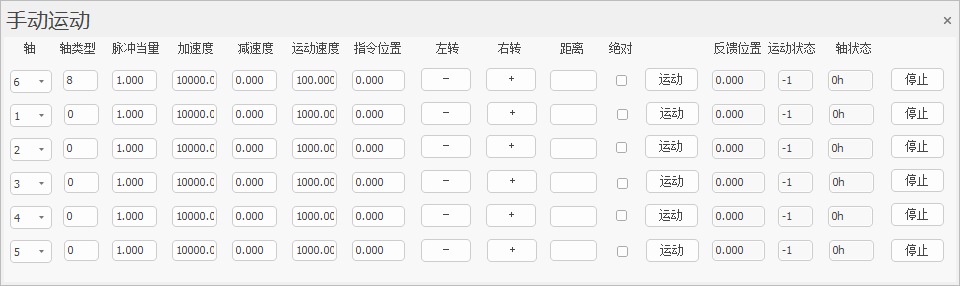
參考上述例程對ZCAN擴展軸軸號進行映射后,便可點擊【工具】-【手動運動】現在對應的軸號,進行左右點動的測試。如果電機運動比較慢看不出來,可以以10的倍數慢慢提升脈沖當量的值,測試看效果。
05 ZCAN擴展模塊常見問題分析
常見問題1:CAN擴展模塊的Power[亮]、Run[亮]、Alarm[亮]和控制器通訊不上,RTSys軟件在【控制器】-【控制器狀態】-【Zcan節點】界面也看不到擴展模塊的信息。
解決建議如下:
A、參考第二節的接線內容,排查接線的電源是否正常(ZIO模塊的主電源是否24V,IO端子的電源是否24V),通過萬用表排查導線是否接線良好,是否有接觸不良的情況,CAN通訊線纜是否使用雙絞屏蔽線,屏蔽層可靠接地,擴展板是否已使用雙電源供電。
B、控制器端是否接120歐電阻,最后面一個擴展模塊撥碼開關8是否撥到ON。
兩端的CAN的地要在同一個地:要保證控制器的主電源的公共端和ZCAN擴展模塊ZIO模塊的主電源的GND接到一起端(俗稱“共零”),同一“地”電勢以防止CAN芯片燒壞。
C、有些擴展模塊(例如ZIO3232MT)需要把撥碼開關7撥上去才使能,可以把撥碼開關7撥到ON,然后斷電重啟查看。
D、撥碼開關是否設置正確,沒有和本體及其他擴展模塊有IO地址的沖突。可以通過RTSys軟件點擊【控制器】-【控制器狀態】-【Zcan節點】可查看到各個ZCAN擴展模塊的IO起始編號等信息。
E、是否存在干擾源,把控制器和擴展模塊的所有IO端子及軸接口等其他接線端子排都拔下來,其他無關的設備先斷電,然后斷電重啟看看是否可以通訊上。
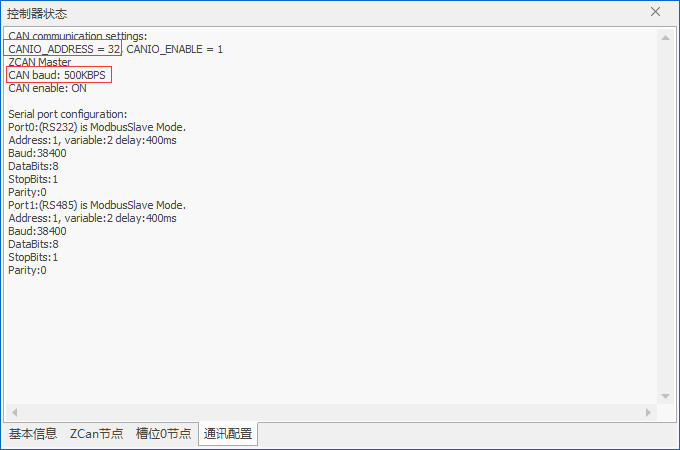
F、控制器的CAN是否是主端模式(CANIO_ADDRESS的bit5有被置1,例如:CANIO_ADDRESS=32 ),CAN通訊的波特率和擴展模塊是否一致。可以通過RTSys軟件點擊【控制器】-【控制器狀態】-【通訊配置】可查看到各個CAN主站設置等詳細信息。
G、查看硬件是否被燒壞,可替換控制器及擴展模塊測試查看。
常見問題2:擴展模塊有一些IO響應正常,有一些IO響應異常。
解決建議:通過RTSys軟件點擊【控制器】-【控制器狀態】-【Zcan節點】可查看到各個ZCAN擴展模塊的IO編號范圍是否有沖突。
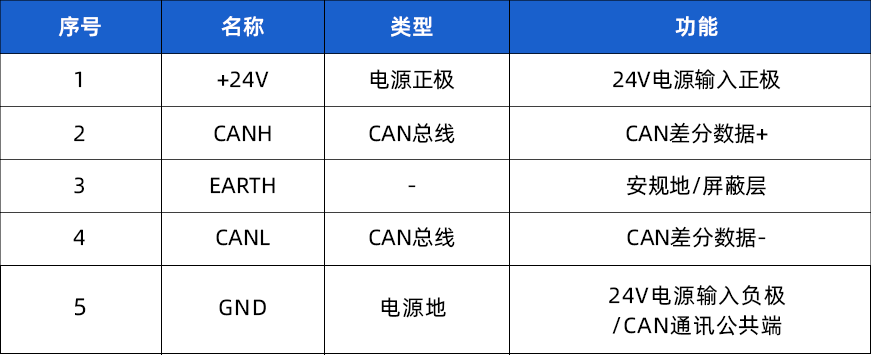
06 ZCAN擴展模塊相關指令說明
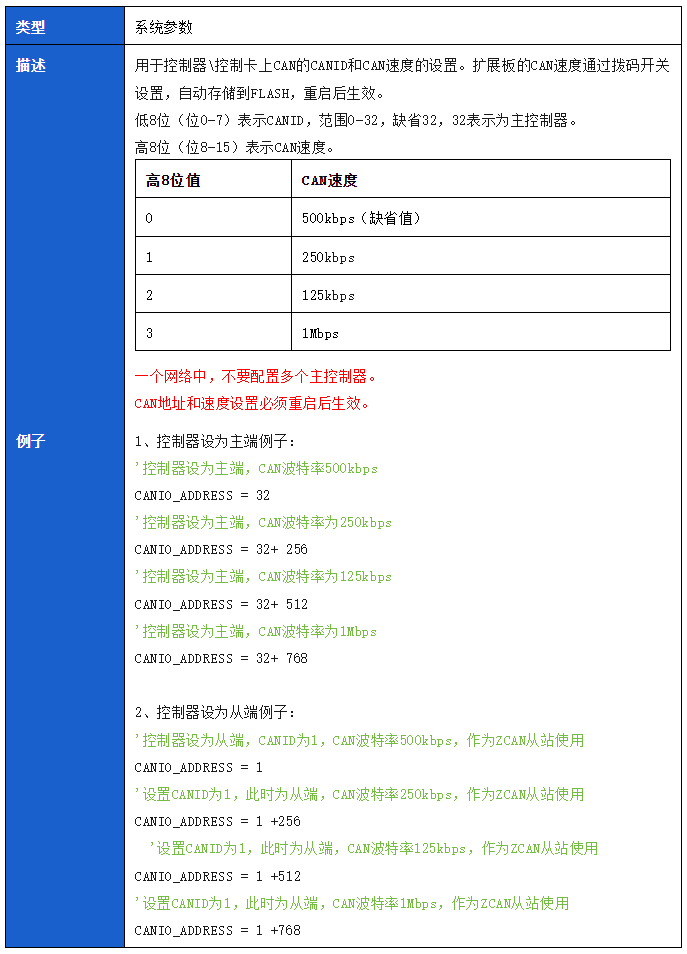
1、CANIO_ADDRESS -- CAN通訊設置
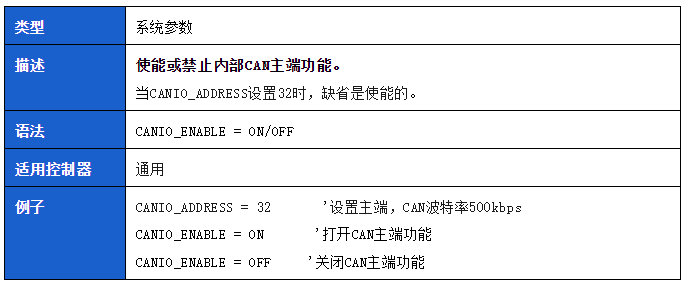
2、CANIO_ENABLE -- CAN使能
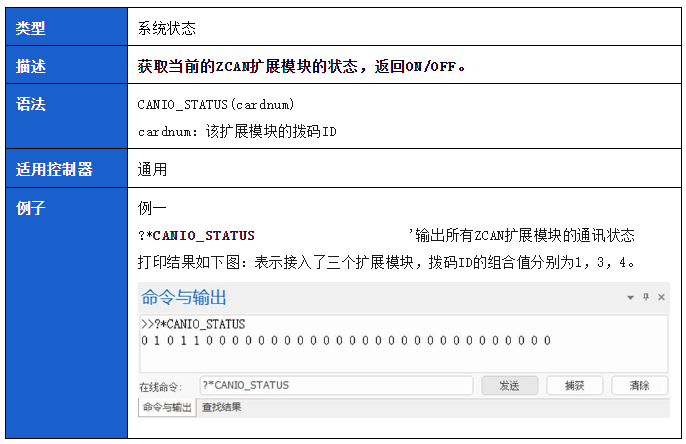
3、CANIO_STATUS -- CAN擴展板通訊狀態查詢
本次,正運動技術運動控制器/運動控制卡配套ZCAN總線ZIO模塊的使用,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
404瀏覽量
24746 -
總線
+關注
關注
10文章
2888瀏覽量
88131 -
ethercat
+關注
關注
18文章
697瀏覽量
38725 -
正運動技術
+關注
關注
0文章
102瀏覽量
423
發布評論請先 登錄
相關推薦




PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應用







 工商網監
工商網監
評論