 超靈敏壓力傳感器:單點觸滑雙模傳感新突破
超靈敏壓力傳感器:單點觸滑雙模傳感新突破
超感官知覺這種說辭出現在不少的科幻影視作品中,各種天馬行空的想象力促進了科技智能化的快速發展。在《阿麗塔,戰斗天使》中的智能裝備改造人阿麗塔不再是冰冷的機器,而是擁有更像人類的氣息與觸覺,通過更高密度的力量反饋以及材質感應器使阿麗塔手臂的觸覺更加靈敏,使改造人能感知到他們所觸摸的東西。科幻影視作品中極為震撼的場面,給我們提供了感官上的炫酷體驗,并讓我們為之神往。
回到我們腳下的大地,全球人類仍在智能傳感器領域進行著各種科技探索。在智能機器人領域中,觸覺傳感器成為抓握的核心元件,其通過物理接觸實現與周圍環境的互動。近年來,傳感技術從剛性逐漸向著柔性、高靈敏、多功能化的方向發展。與人體皮膚類似,智能觸覺傳感器應能夠準確識別各種接觸力,從而有效地控制目標物體為機器人提供類似人類的抓取能力。然而,由于高靈敏度及數據解耦要求,開發單點檢測不同模式接觸力的觸覺傳感器是非常困難的。因此,同時實現法向壓力和滑動檢測對觸覺傳感器的工藝、性能及數據分析技術均提出了重大挑戰。
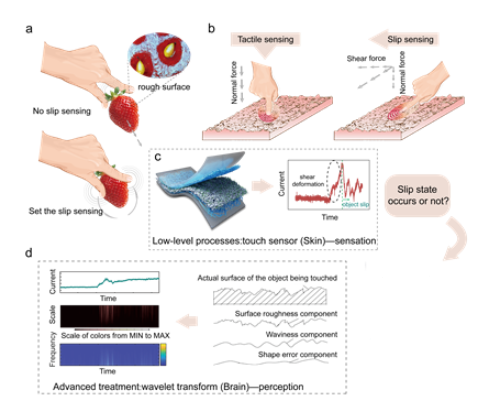
北京航空航天大學潘曹峰團隊和北京納米能源與系統研究所鮑容容團隊及其博士生劉月等人通過相轉化-犧牲模板法實現了觸覺傳感器的超高靈敏度,并通過對輸出信號進行小波變換實現了復雜接觸狀態的單點多模態傳感。實現單元像素點的多模態傳感,有兩個必要條件。首先,類似于神經信號采集,需要低級處理,有必要通過高靈敏傳感器檢測觸覺信號的詳細信息;其次,感知還需要大腦進行高級分析,其中涉及信息整合和特征提取,即需要后續的信號處理在時域和頻域上對信號同時做出分析。
鑒于此,相轉化-犧牲模板法只需要基本的實驗儀器,靈敏層即可在10 s內一步成型。經驗證,其適用于TPU、PS、PAN等多種材料,所制備膜的可控性和通用性可以根據膜的結構和性能期望應用進行調整。并且,構建了1167 kPa-1超高靈敏度的壓力傳感器,經驗證,該觸覺傳感器可同時檢測到成年女性頸動脈脈搏和呼吸頻率的微弱波動。
基于信號精細采集,進一步結合小波變換對觸/滑覺信號進行頻域特征提取,通過高級處理實現對目標物體多模態的判斷。經驗證,該壓力傳感器可通過單元器件區分物體的靜壓狀態及滑動瞬時刻,后期通過反饋系統集成,可使機器人根據物體質量的變化調整抓握力,從而實現可控抓握。
研究者相信,此項研究將會為傳感器靈敏層的制備及信號分析方式打開一扇窗戶,并為多模態觸覺傳感器的發展提供新的思路。該領域的迅速發展將賦予機器人視覺、力覺、觸覺、嗅覺、味覺等對外部環境的多種感知能力,為人機交互提供更為自然和智能的體驗。相關論文在線發表在Advanced Materials上,并于當期Inside Front Cover做簡要介紹。
審核編輯:黃飛
-
機器人
+關注
關注
211文章
28381瀏覽量
206919 -
壓力傳感器
+關注
關注
35文章
2212瀏覽量
163386 -
觸覺傳感器
+關注
關注
4文章
85瀏覽量
9339
原文標題:未來抓握科技:超靈敏壓力傳感器實現單點觸/滑覺雙模傳感
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
水壓力傳感器的特點和優勢 水壓力傳感器的校準方法
氣體壓力傳感器的種類和特點 氣體壓力傳感器在環保監測中的應用
氣體壓力傳感器與液體壓力傳感器的區別
壓力傳感器屬于什么類別
常見的壓力傳感器有哪些
壓力傳感器芯片原理是什么
壓力傳感器芯片有哪些型號
壓力傳感器分類、原理及型號大全
壓力傳感器原理及應用介紹
如何選擇壓力傳感器量程?如何選擇壓力傳感器接頭?

你了解壓力傳感器的壓力技術嗎?壓力傳感器有哪些使用注意事項?

壓力傳感器原理及應用 壓力傳感器怎么測試好壞
壓力傳感器型號及參數 壓力傳感器分類及用途
壓力傳感器原理及應用 壓力傳感器容易壞的原因
壓力傳感器的工作原理及應用






 工商網監
工商網監
評論