

本篇測評由電子工程世界的優秀測評者“jf_99374259”提供。
本文將介紹基于米爾電子MYD-YT113i開發板的G2D圖像處理硬件調用和測試。
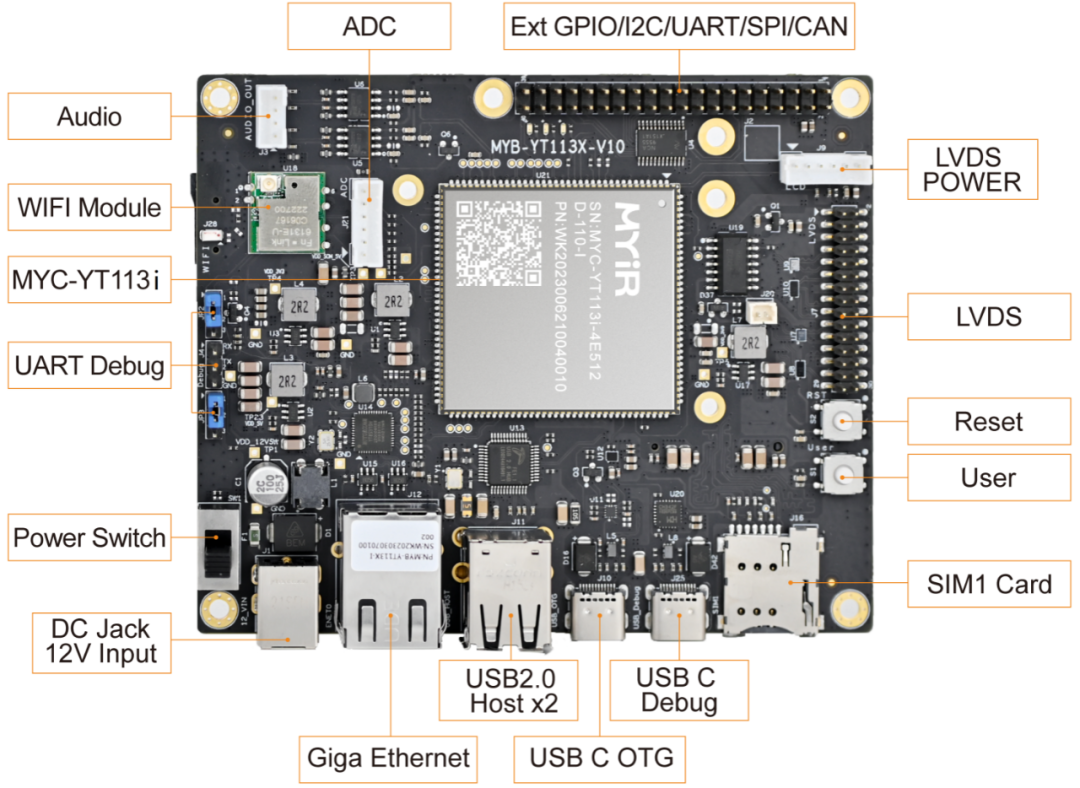
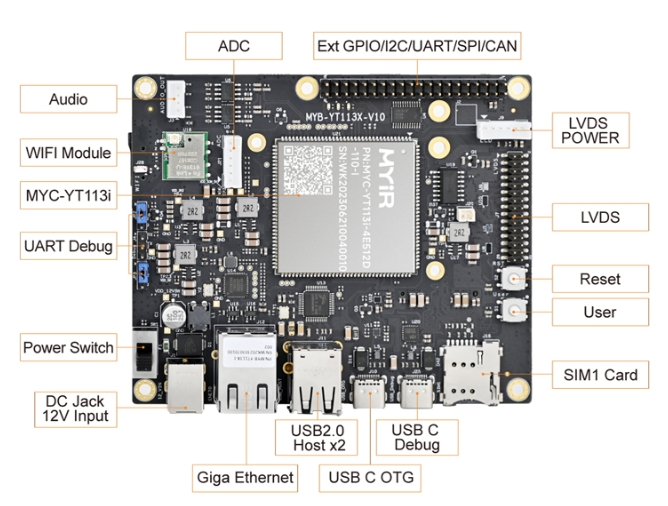
MYC-YT113i核心板及開發板
真正的國產核心板,100%國產物料認證
國產T113-i處理器配備2*Cortex-A7@1.2GHz ,RISC-V
接口豐富:視頻采集接口、顯示器接口、USB2.0 接口、CAN 接口、千兆以太網接口
工業級:-40℃~+85℃、尺寸37mm*39mm
- 郵票孔+LGA,140+50PIN

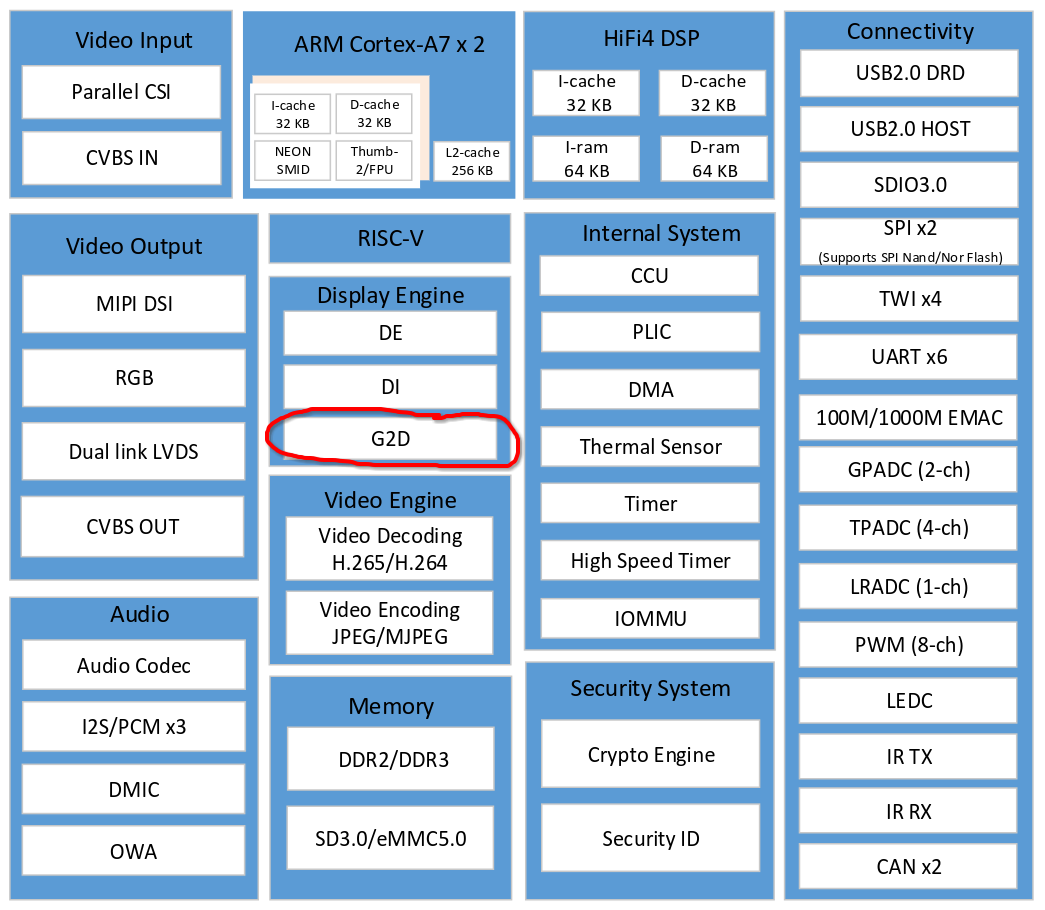
全志 T113-i 2D圖形加速硬件支持情況
Supports layer size up to 2048 x 2048 pixels
Supports pre-multiply alpha image data
Supports color key
Supports two pipes Porter-Duff alpha blending
Supports multiple video formats 40, 42, 41 and multiple pixel formats (8/16/24/32 bits graphics
layer)
Supports memory scan order option
Supports any format convert function
Supports 1/16× to 32× resize ratio
Supports 32-phase 8-tap horizontal anti-alias filter and 32-phase 4-tap vertical anti-alias filter
Supports window clip
Supports FillRectangle, BitBlit, StretchBlit and MaskBlit
Supports horizontal and vertical flip, clockwise 0/90/180/270 degree rotate for normal buffer
Supports horizontal flip, clockwise 0/90/270 degree rotate for LBC buffer
可以看到 g2d 硬件支持相當多的2D圖像處理,包括顏色空間轉換,分辨率縮放,圖層疊加,旋轉等
開發環境配置
基礎開發環境搭建參考上上上一篇https://bbs.elecfans.com/jishu_2408808_1_1.html除了工具鏈外,我們使用 opencv-mobile 加載輸入圖片和保存結果,用來查看顏色轉換是否正常g2d硬件直接采用標準的 Linux ioctl 操縱,只需要引入相關結構體定義即可,無需鏈接sohttps://github.com/MYIR-ALLWINNER/framework/blob/develop-yt113-framework/auto/sdk_lib/include/g2d_driver.h此外,g2d的輸入和輸出數據必須在dmaion buffer上,因此還需要dmaion.h頭文件,用來分配和釋放dmaion bufferhttps://github.com/MYIR-ALLWINNER/framework/blob/develop-yt113-framework/auto/sdk_lib/include/DmaIon.h
基于C語言實現的YUV轉RGB
這里復用之前T113-i JPG解碼的函數
void yuv420sp2rgb(const unsigned char* yuv420sp, int w, int h, unsigned char* rgb){ const unsigned char* yptr = yuv420sp; const unsigned char* vuptr = yuv420sp + w * h;
for (int y = 0; y < h; y += 2) { const unsigned char* yptr0 = yptr; const unsigned char* yptr1 = yptr + w; unsigned char* rgb0 = rgb; unsigned char* rgb1 = rgb + w * 3;
int remain = w;
#define SATURATE_CAST_UCHAR(X) (unsigned char)::max((int)(X), 0), 255); for (; remain > 0; remain -= 2) { // R = 1.164 * yy + 1.596 * vv // G = 1.164 * yy - 0.813 * vv - 0.391 * uu // B = 1.164 * yy + 2.018 * uu
// R = Y + (1.370705 * (V-128)) // G = Y - (0.698001 * (V-128)) - (0.337633 * (U-128)) // B = Y + (1.732446 * (U-128))
// R = ((Y << 6) + 87.72512 * (V-128)) >> 6 // G = ((Y << 6) - 44.672064 * (V-128) - 21.608512 * (U-128)) >> 6 // B = ((Y << 6) + 110.876544 * (U-128)) >> 6
// R = ((Y << 6) + 90 * (V-128)) >> 6 // G = ((Y << 6) - 46 * (V-128) - 22 * (U-128)) >> 6 // B = ((Y << 6) + 113 * (U-128)) >> 6
// R = (yy + 90 * vv) >> 6 // G = (yy - 46 * vv - 22 * uu) >> 6 // B = (yy + 113 * uu) >> 6
int v = vuptr[0] - 128; int u = vuptr[1] - 128;
int ruv = 90 * v; int guv = -46 * v + -22 * u; int buv = 113 * u;
int y00 = yptr0[0] << 6; rgb0[0] = SATURATE_CAST_UCHAR((y00 + ruv) >> 6); rgb0[1] = SATURATE_CAST_UCHAR((y00 + guv) >> 6); rgb0[2] = SATURATE_CAST_UCHAR((y00 + buv) >> 6);
int y01 = yptr0[1] << 6; rgb0[3] = SATURATE_CAST_UCHAR((y01 + ruv) >> 6); rgb0[4] = SATURATE_CAST_UCHAR((y01 + guv) >> 6); rgb0[5] = SATURATE_CAST_UCHAR((y01 + buv) >> 6);
int y10 = yptr1[0] << 6; rgb1[0] = SATURATE_CAST_UCHAR((y10 + ruv) >> 6); rgb1[1] = SATURATE_CAST_UCHAR((y10 + guv) >> 6); rgb1[2] = SATURATE_CAST_UCHAR((y10 + buv) >> 6);
int y11 = yptr1[1] << 6; rgb1[3] = SATURATE_CAST_UCHAR((y11 + ruv) >> 6); rgb1[4] = SATURATE_CAST_UCHAR((y11 + guv) >> 6); rgb1[5] = SATURATE_CAST_UCHAR((y11 + buv) >> 6);
yptr0 += 2; yptr1 += 2; vuptr += 2; rgb0 += 6; rgb1 += 6; }#undef SATURATE_CAST_UCHAR
yptr += 2 * w; rgb += 2 * 3 * w; }}
基于ARM neon指令集優化的YUV轉RGB
考慮到armv7編譯器的自動neon優化能力較差,這里針對性的編寫 arm neon inline assembly 實現YUV2RGB內核部分,達到最優化的性能,榨干cpu性能
void yuv420sp2rgb_neon(const unsigned char* yuv420sp, int w, int h, unsigned char* rgb){ const unsigned char* yptr = yuv420sp; const unsigned char* vuptr = yuv420sp + w * h;
#if __ARM_NEON uint8x8_t _v128 = vdup_n_u8(128); int8x8_t _v90 = vdup_n_s8(90); int8x8_t _v46 = vdup_n_s8(46); int8x8_t _v22 = vdup_n_s8(22); int8x8_t _v113 = vdup_n_s8(113);#endif // __ARM_NEON
for (int y = 0; y < h; y += 2) { const unsigned char* yptr0 = yptr; const unsigned char* yptr1 = yptr + w; unsigned char* rgb0 = rgb; unsigned char* rgb1 = rgb + w * 3;
#if __ARM_NEON int nn = w >> 3; int remain = w - (nn << 3);#else int remain = w;#endif // __ARM_NEON
#if __ARM_NEON#if __aarch64__ for (; nn > 0; nn--) { int16x8_t _yy0 = vreinterpretq_s16_u16(vshll_n_u8(vld1_u8(yptr0), 6)); int16x8_t _yy1 = vreinterpretq_s16_u16(vshll_n_u8(vld1_u8(yptr1), 6));
int8x8_t _vvuu = vreinterpret_s8_u8(vsub_u8(vld1_u8(vuptr), _v128)); int8x8x2_t _vvvvuuuu = vtrn_s8(_vvuu, _vvuu); int8x8_t _vv = _vvvvuuuu.val[0]; int8x8_t _uu = _vvvvuuuu.val[1];
int16x8_t _r0 = vmlal_s8(_yy0, _vv, _v90); int16x8_t _g0 = vmlsl_s8(_yy0, _vv, _v46); _g0 = vmlsl_s8(_g0, _uu, _v22); int16x8_t _b0 = vmlal_s8(_yy0, _uu, _v113);
int16x8_t _r1 = vmlal_s8(_yy1, _vv, _v90); int16x8_t _g1 = vmlsl_s8(_yy1, _vv, _v46); _g1 = vmlsl_s8(_g1, _uu, _v22); int16x8_t _b1 = vmlal_s8(_yy1, _uu, _v113);
uint8x8x3_t _rgb0; _rgb0.val[0] = vqshrun_n_s16(_r0, 6); _rgb0.val[1] = vqshrun_n_s16(_g0, 6); _rgb0.val[2] = vqshrun_n_s16(_b0, 6);
uint8x8x3_t _rgb1; _rgb1.val[0] = vqshrun_n_s16(_r1, 6); _rgb1.val[1] = vqshrun_n_s16(_g1, 6); _rgb1.val[2] = vqshrun_n_s16(_b1, 6);
vst3_u8(rgb0, _rgb0); vst3_u8(rgb1, _rgb1);
yptr0 += 8; yptr1 += 8; vuptr += 8; rgb0 += 24; rgb1 += 24; }#else if (nn > 0) { asm volatile( "0: \n" "pld [%3, #128] \n" "vld1.u8 {d2}, [%3]! \n" "vsub.s8 d2, d2, %12 \n" "pld [%1, #128] \n" "vld1.u8 {d0}, [%1]! \n" "pld [%2, #128] \n" "vld1.u8 {d1}, [%2]! \n" "vshll.u8 q2, d0, #6 \n" "vorr d3, d2, d2 \n" "vshll.u8 q3, d1, #6 \n" "vorr q9, q2, q2 \n" "vtrn.s8 d2, d3 \n" "vorr q11, q3, q3 \n" "vmlsl.s8 q9, d2, %14 \n" "vorr q8, q2, q2 \n" "vmlsl.s8 q11, d2, %14 \n" "vorr q10, q3, q3 \n" "vmlal.s8 q8, d2, %13 \n" "vmlal.s8 q2, d3, %16 \n" "vmlal.s8 q10, d2, %13 \n" "vmlsl.s8 q9, d3, %15 \n" "vmlal.s8 q3, d3, %16 \n" "vmlsl.s8 q11, d3, %15 \n" "vqshrun.s16 d24, q8, #6 \n" "vqshrun.s16 d26, q2, #6 \n" "vqshrun.s16 d4, q10, #6 \n" "vqshrun.s16 d25, q9, #6 \n" "vqshrun.s16 d6, q3, #6 \n" "vqshrun.s16 d5, q11, #6 \n" "subs %0, #1 \n" "vst3.u8 {d24-d26}, [%4]! \n" "vst3.u8 {d4-d6}, [%5]! \n" "bne 0b \n" : "=r"(nn), // %0 "=r"(yptr0), // %1 "=r"(yptr1), // %2 "=r"(vuptr), // %3 "=r"(rgb0), // %4 "=r"(rgb1) // %5 : "0"(nn), "1"(yptr0), "2"(yptr1), "3"(vuptr), "4"(rgb0), "5"(rgb1), "w"(_v128), // %12 "w"(_v90), // %13 "w"(_v46), // %14 "w"(_v22), // %15 "w"(_v113) // %16 : "cc", "memory", "q0", "q1", "q2", "q3", "q8", "q9", "q10", "q11", "q12", "d26"); }#endif // __aarch64__#endif // __ARM_NEON
#define SATURATE_CAST_UCHAR(X) (unsigned char)::max((int)(X), 0), 255); for (; remain > 0; remain -= 2) { // R = 1.164 * yy + 1.596 * vv // G = 1.164 * yy - 0.813 * vv - 0.391 * uu // B = 1.164 * yy + 2.018 * uu
// R = Y + (1.370705 * (V-128)) // G = Y - (0.698001 * (V-128)) - (0.337633 * (U-128)) // B = Y + (1.732446 * (U-128))
// R = ((Y << 6) + 87.72512 * (V-128)) >> 6 // G = ((Y << 6) - 44.672064 * (V-128) - 21.608512 * (U-128)) >> 6 // B = ((Y << 6) + 110.876544 * (U-128)) >> 6
// R = ((Y << 6) + 90 * (V-128)) >> 6 // G = ((Y << 6) - 46 * (V-128) - 22 * (U-128)) >> 6 // B = ((Y << 6) + 113 * (U-128)) >> 6
// R = (yy + 90 * vv) >> 6 // G = (yy - 46 * vv - 22 * uu) >> 6 // B = (yy + 113 * uu) >> 6
int v = vuptr[0] - 128; int u = vuptr[1] - 128;
int ruv = 90 * v; int guv = -46 * v + -22 * u; int buv = 113 * u;
int y00 = yptr0[0] << 6; rgb0[0] = SATURATE_CAST_UCHAR((y00 + ruv) >> 6); rgb0[1] = SATURATE_CAST_UCHAR((y00 + guv) >> 6); rgb0[2] = SATURATE_CAST_UCHAR((y00 + buv) >> 6);
int y01 = yptr0[1] << 6; rgb0[3] = SATURATE_CAST_UCHAR((y01 + ruv) >> 6); rgb0[4] = SATURATE_CAST_UCHAR((y01 + guv) >> 6); rgb0[5] = SATURATE_CAST_UCHAR((y01 + buv) >> 6);
int y10 = yptr1[0] << 6; rgb1[0] = SATURATE_CAST_UCHAR((y10 + ruv) >> 6); rgb1[1] = SATURATE_CAST_UCHAR((y10 + guv) >> 6); rgb1[2] = SATURATE_CAST_UCHAR((y10 + buv) >> 6);
int y11 = yptr1[1] << 6; rgb1[3] = SATURATE_CAST_UCHAR((y11 + ruv) >> 6); rgb1[4] = SATURATE_CAST_UCHAR((y11 + guv) >> 6); rgb1[5] = SATURATE_CAST_UCHAR((y11 + buv) >> 6);
yptr0 += 2; yptr1 += 2; vuptr += 2; rgb0 += 6; rgb1 += 6; }#undef SATURATE_CAST_UCHAR
yptr += 2 * w; rgb += 2 * 3 * w; }}
基于G2D圖形硬件的YUV轉RGB
我們先實現 dmaion buffer 管理器,參考
https://github.com/MYIR-ALLWINNER/framework/blob/develop-yt113-framework/auto/sdk_lib/sdk_memory/DmaIon.cpp
這里貼的代碼省略了異常錯誤處理的邏輯,有個坑是 linux-4.9 和 linux-5.4 用法不一樣,米爾電子的這個T113-i系統是linux-5.4,所以不兼容4.9內核的ioctl用法習慣
struct ion_memory{ size_t size; int fd; void* virt_addr; unsigned int phy_addr;};
class ion_allocator{public: ion_allocator(); ~ion_allocator();
int open(); void close();
int alloc(size_t size, struct ion_memory* mem); int free(struct ion_memory* mem);
int flush(struct ion_memory* mem);
public: int ion_fd; int cedar_fd;};
ion_allocator::ion_allocator(){ ion_fd = -1; cedar_fd = -1;}
ion_allocator::~ion_allocator(){ close();}
int ion_allocator::open(){ close();
ion_fd = ::open("/dev/ion", O_RDWR); cedar_fd = ::open("/dev/cedar_dev", O_RDONLY);
ioctl(cedar_fd, IOCTL_ENGINE_REQ, 0);
return 0;}
void ion_allocator::close(){ if (cedar_fd != -1) { ioctl(cedar_fd, IOCTL_ENGINE_REL, 0); ::close(cedar_fd); cedar_fd = -1; }
if (ion_fd != -1) { ::close(ion_fd); ion_fd = -1; }}
int ion_allocator::alloc(size_t size, struct ion_memory* mem){ struct aw_ion_new_alloc_data alloc_data; alloc_data.len = size; alloc_data.heap_id_mask = AW_ION_SYSTEM_HEAP_MASK; alloc_data.flags = AW_ION_CACHED_FLAG | AW_ION_CACHED_NEEDS_SYNC_FLAG; alloc_data.fd = 0; alloc_data.unused = 0; ioctl(ion_fd, AW_ION_IOC_NEW_ALLOC, &alloc_data);
void* virt_addr = mmap(NULL, size, PROT_READ|PROT_WRITE, MAP_SHARED, alloc_data.fd, 0);
struct aw_user_iommu_param iommu_param; iommu_param.fd = alloc_data.fd; iommu_param.iommu_addr = 0; ioctl(cedar_fd, IOCTL_GET_IOMMU_ADDR, &iommu_param);
mem->size = size; mem->fd = alloc_data.fd; mem->virt_addr = virt_addr; mem->phy_addr = iommu_param.iommu_addr;
return 0;}
int ion_allocator::free(struct ion_memory* mem){ if (mem->fd == -1) return 0;
struct aw_user_iommu_param iommu_param; iommu_param.fd = mem->fd; ioctl(cedar_fd, IOCTL_FREE_IOMMU_ADDR, &iommu_param);
munmap(mem->virt_addr, mem->size);
::close(mem->fd);
mem->size = 0; mem->fd = -1; mem->virt_addr = 0; mem->phy_addr = 0;
return 0;}
int ion_allocator::flush(struct ion_memory* mem){ struct dma_buf_sync sync; sync.flags = DMA_BUF_SYNC_END | DMA_BUF_SYNC_RW; ioctl(mem->fd, DMA_BUF_IOCTL_SYNC, &sync);
return 0;}
然后再實現 G2D圖形硬件 YUV轉RGB 的轉換器
提前分配好YUV和RGB的dmaion buffer
將YUV數據拷貝到dmaion buffer,flush cache完成同步
配置轉換參數,ioctl調用G2D_CMD_BITBLT_H完成轉換
flush cache完成同步,從dmaion buffer拷貝出RGB數據
釋放dmaion buffer
// 步驟1ion_allocator ion;ion.open();
struct ion_memory yuv_ion;ion.alloc(rgb_size, &rgb_ion);
struct ion_memory rgb_ion;ion.alloc(yuv_size, &yuv_ion);
int g2d_fd = ::open("/dev/g2d", O_RDWR);
// 步驟2memcpy((unsigned char*)yuv_ion.virt_addr, yuv420sp, yuv_size);ion.flush(&yuv_ion);
// 步驟3g2d_blt_h blit;memset(&blit, 0, sizeof(blit));
blit.flag_h = G2D_BLT_NONE_H;
blit.src_image_h.format = G2D_FORMAT_YUV420UVC_V1U1V0U0;blit.src_image_h.width = width;blit.src_image_h.height = height;blit.src_image_h.align[0] = 0;blit.src_image_h.align[1] = 0;blit.src_image_h.clip_rect.x = 0;blit.src_image_h.clip_rect.y = 0;blit.src_image_h.clip_rect.w = width;blit.src_image_h.clip_rect.h = height;blit.src_image_h.gamut = G2D_BT601;blit.src_image_h.bpremul = 0;blit.src_image_h.mode = G2D_PIXEL_ALPHA;blit.src_image_h.use_phy_addr = 0;blit.src_image_h.fd = yuv_ion.fd;
blit.dst_image_h.format = G2D_FORMAT_RGB888;blit.dst_image_h.width = width;blit.dst_image_h.height = height;blit.dst_image_h.align[0] = 0;blit.dst_image_h.clip_rect.x = 0;blit.dst_image_h.clip_rect.y = 0;blit.dst_image_h.clip_rect.w = width;blit.dst_image_h.clip_rect.h = height;blit.dst_image_h.gamut = G2D_BT601;blit.dst_image_h.bpremul = 0;blit.dst_image_h.mode = G2D_PIXEL_ALPHA;blit.dst_image_h.use_phy_addr = 0;blit.dst_image_h.fd = rgb_ion.fd;
ioctl(g2d_fd, G2D_CMD_BITBLT_H, &blit);
// 步驟4ion.flush(&rgb_ion);memcpy(rgb, (const unsigned char*)rgb_ion.virt_addr, rgb_size);
// 步驟5ion.free(&rgb_ion);ion.free(&yuv_ion);ion.close();::close(g2d_fd);
G2D圖像硬件YUV轉RGB測試
考慮到dmaion buffer分配和釋放都比較耗時,我們提前做好,循環調用步驟3的G2D轉換,統計耗時,并在top工具中查看CPU占用率
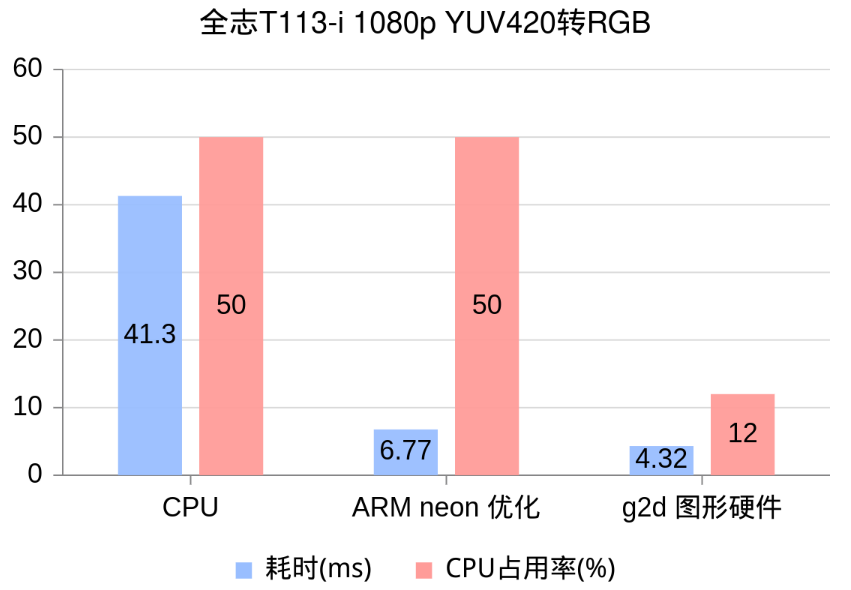
sh-4.4# LD_LIBRARY_PATH=. ./g2dtestINFO : cedarc : register mjpeg decoder success!this device is not whitelisted for jpeg decoder cvithis device is not whitelisted for jpeg decoder cvithis device is not whitelisted for jpeg decoder cvithis device is not whitelisted for jpeg encoder rkmppINFO : cedarc : Set log level to 5 from /vendor/etc/cedarc.confERROR : cedarc : now cedarc log level:5ERROR : cedarc : now cedarc log level:5yuv420sp2rgb 46.61yuv420sp2rgb 42.04yuv420sp2rgb 41.32yuv420sp2rgb 42.06yuv420sp2rgb 41.69yuv420sp2rgb 42.05yuv420sp2rgb 41.29yuv420sp2rgb 41.30yuv420sp2rgb 42.14yuv420sp2rgb 41.33yuv420sp2rgb_neon 10.57yuv420sp2rgb_neon 7.21yuv420sp2rgb_neon 6.77yuv420sp2rgb_neon 8.31yuv420sp2rgb_neon 7.60yuv420sp2rgb_neon 6.80yuv420sp2rgb_neon 6.77yuv420sp2rgb_neon 7.01yuv420sp2rgb_neon 7.11yuv420sp2rgb_neon 7.06yuv420sp2rgb_g2d 4.32yuv420sp2rgb_g2d 4.69yuv420sp2rgb_g2d 4.56yuv420sp2rgb_g2d 4.57yuv420sp2rgb_g2d 4.52yuv420sp2rgb_g2d 4.54yuv420sp2rgb_g2d 4.52yuv420sp2rgb_g2d 4.58yuv420sp2rgb_g2d 4.60yuv420sp2rgb_g2d 4.67
可以看到 ARM neon 的優化效果非常明顯,而使用G2D圖形硬件能獲得進一步加速,并且能顯著降低CPU占用率!
| 耗時(ms) | CPU占用率(%) | |
|---|---|---|
| C | 41.30 | 50 |
| neon | 6.77 | 50 |
| g2d | 4.32 | 12 |
轉換結果對比和分析
C和neon的轉換結果完全一致,但是g2d轉換后的圖片有明顯的色差
G2D圖形硬件只支持 G2D_BT601,G2D_BT709,G2D_BT2020 3種YUV系數,而JPG所使用的YUV系數是改版BT601,因此產生了色差
https://github.com/MYIR-ALLWINNER/myir-t1-kernel/blob/develop-yt113-L5.4.61/drivers/char/sunxi_g2d/g2d_bsp_v2.c
從g2d內核驅動中也可以得知,暫時沒有方法為g2d設置自定義的YUV系數,g2d不適合用于JPG的編解碼,但依然適合攝像頭和視頻編解碼的顏色空間轉換
-
圖像處理
+關注
關注
27文章
1324瀏覽量
57698 -
開發板
+關注
關注
25文章
5500瀏覽量
102178 -
米爾電子
+關注
關注
0文章
134瀏覽量
715
發布評論請先 登錄
飛凌OK113i-C全志T113-i開發板rtl8723du WIFI功能測試及藍牙驅動移植
【米爾-全志T113-i開發板試用】發布opencv-mobile米爾t113i專享預編譯包
【米爾-全志T113-i開發板試用】米爾-全志T113-i開發環境搭建
【米爾-全志T113-i開發板試用】移植libmodbus庫到米爾-全志T113-i開發板
【米爾-全志T113-i開發板試用】米爾-全志T113-i開發板與modbus設備的連接和操作
G2D圖像處理硬件調用和測試-基于米爾-全志T113-i開發板
哇!0.8秒啟動!Linux快速啟動方案分享,全志T113-i國產平臺!
100%國產物料認證,米爾入門級國產核心板全志T113-i方案









 工商網監
工商網監

評論