


隨著自動駕駛技術(shù)的快速發(fā)展,多傳感器的數(shù)據(jù)采集和融合可以顯著提高系統(tǒng)的冗余度和容錯性,進而保證決策的快速性和正確性。在項目開發(fā)迭代過程中,傳感器標定扮演著至關(guān)重要的角色,它位于數(shù)據(jù)采集平臺與感知融合算法之間,是確保傳感器數(shù)據(jù)準確性的基礎(chǔ),同時也是實現(xiàn)傳感器融合的關(guān)鍵先決條件。
在眾多傳感器中,相機以其豐富的信息獲取能力和成本效益而成為自動駕駛系統(tǒng)中的首選。相機標定可以提高空間定位精度,消除畸變影響,統(tǒng)一傳感器數(shù)據(jù)以及增強系統(tǒng)的魯棒性。
一、相機的工作原理
通過相機拍攝圖像,可以將3D世界投影成2D圖像。因此可以把相機模型看作一個從3D空間到2D空間的映射。采用小孔成像模型來描述相機的成像原理。
小孔成像模型由光心、光軸和成像平面幾個部分組成,且假設(shè)所有成像過程都滿足光的直線傳播條件。根據(jù)光的直線傳播理論,空間中的物點反射光經(jīng)過光心后,投影到平面形成一個倒立的像點。雖然作為理想的成像模型,小孔成像的物理性質(zhì)極佳,但是實際的相機光學系統(tǒng)中大多是由透鏡組成的,在透鏡成像中需要滿足以下條件:

其中,f表示透鏡的焦距,u表示物距,v表示像距,如圖1所示。
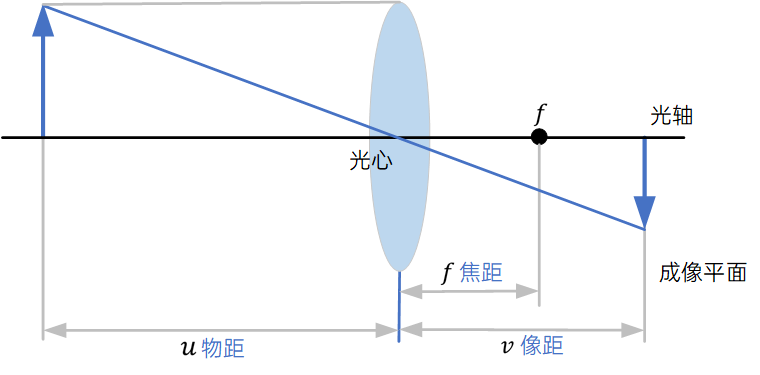
圖1 凸透鏡成像原理
相機成像系統(tǒng)主要有4個坐標系,分別是世界坐標系、相機坐標系、圖像坐標系和像素坐標系,如圖2所示。世界坐標系通過平移和旋轉(zhuǎn)得到相機坐標系,相機坐標系通過成像模型中的相似三角形原理得到圖像坐標系,圖像坐標系通過平移和縮放得到像素坐標系。
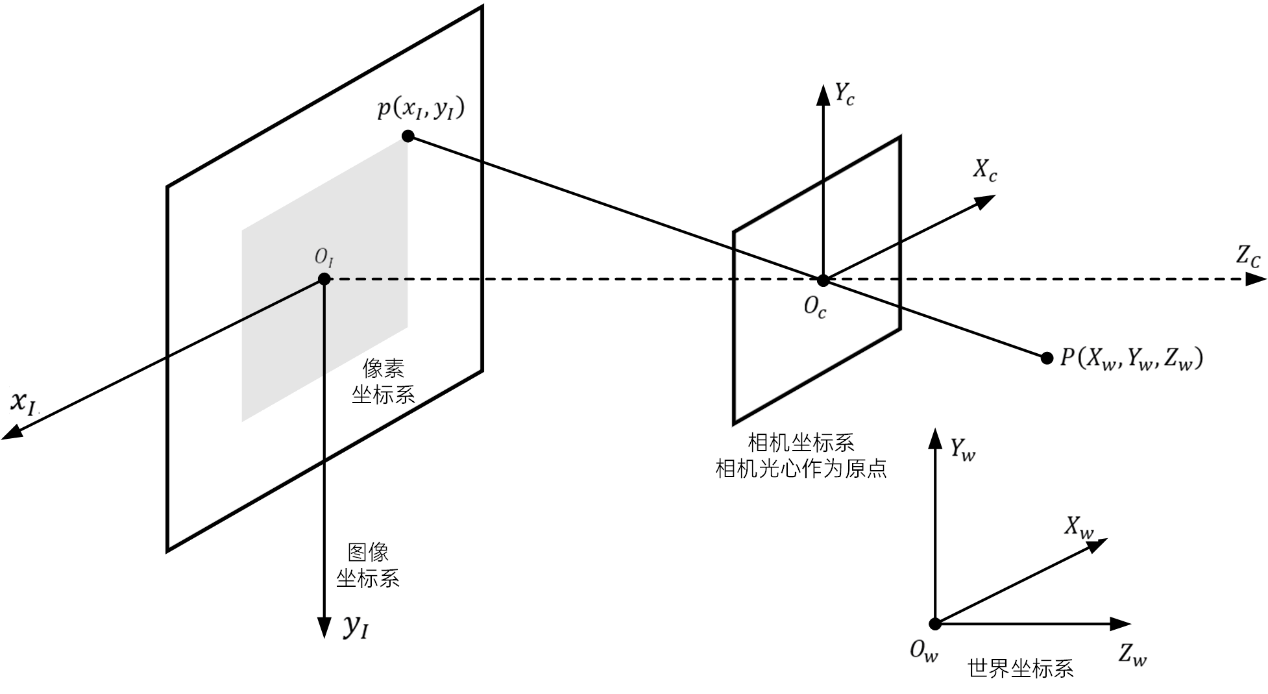
圖2相機成像系統(tǒng)中4個坐標系之間的關(guān)系
這些坐標系描述了從三維空間到二維圖像的坐標變換過程。標定的目標是確定這種變換關(guān)系,即三維物體表面點與二維圖像對應(yīng)點之間的關(guān)系,從而建立攝像頭成像的幾何模型。
二、相機的標定參數(shù)
相機的標定參數(shù)主要包括內(nèi)參、外參和畸變參數(shù)。從世界坐標系到像素坐標系的轉(zhuǎn)換是圖像處理和計算機視覺中的關(guān)鍵步驟,它允許我們理解圖像中物體的真實位置和尺寸,進而實現(xiàn)各種應(yīng)用,如自動駕駛中的物體檢測與定位。
- 內(nèi)參是相機自身的固有屬性,包括焦距、主點坐標和像素的物理尺寸等信息,這些參數(shù)不會因外界環(huán)境而改變,可以通過標定獲得。相機的內(nèi)參矩陣
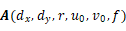
- ,內(nèi)參矩陣是實現(xiàn)圖像坐標系與像素坐標系轉(zhuǎn)換的關(guān)鍵。dx,dy分別表示在x和y軸方向上一個像素占據(jù)的實際長度,r 表示徑向畸變參數(shù)之一,f 表示焦距,u0,v0表示像素坐標下的主坐標點。
- 外參描述了攝像頭在世界坐標系中的位置和方向,包括旋轉(zhuǎn)角度和平移參數(shù),它說明了現(xiàn)實世界點是如何通過平移和旋轉(zhuǎn)映射到攝像頭坐標系的。其中,
- R為旋轉(zhuǎn)矩陣,負責實現(xiàn)坐標系之間的旋轉(zhuǎn)變換。T為平移矩陣,負責實現(xiàn)坐標系之間的平移變換。
- 畸變參數(shù)則是用來描述攝像頭成像過程中產(chǎn)生的形狀改變和扭曲。畸變主要包括徑向畸變和切向畸變,即相機的徑向畸變系數(shù)k1,k2,k3等和相機的切向畸變系數(shù)p1,p2等。常見的畸變類型,如圖3所示。
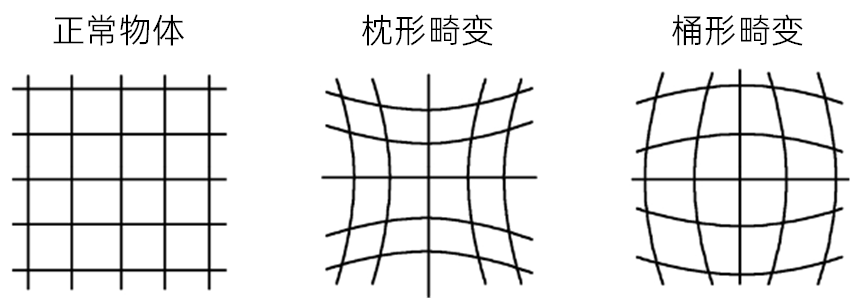
圖3圖像畸變的兩種類型
因此,世界坐標系到像素坐標系的轉(zhuǎn)換關(guān)系為:

其中,

為內(nèi)參,

為外參。
其中,相機坐標系到圖像坐標系轉(zhuǎn)換時,由于相機鏡頭制造工藝緣故,需要進行畸變橋正。徑向畸變是由于透鏡形狀的制造工藝導(dǎo)致的,且越向透鏡邊緣移動,徑向畸變就越嚴重。矯正徑向畸變前后的坐標關(guān)系為:


切向畸變是由透鏡和CMOS或者CCD的安裝位置誤差導(dǎo)致的。切向畸變需要兩個額外的畸變參數(shù)來描述,矯正前后的坐標關(guān)系為:


因此,一共需要5個畸變參數(shù)
求出上述這些參數(shù)即完成了標定過程。
三、標定方法
標定方法是視覺領(lǐng)域中攝像頭校準的關(guān)鍵步驟,直接影響視覺系統(tǒng)的輸出結(jié)果。主要的標定方法包括自標定、根據(jù)參照物進行標定和基于主動視覺的標定法。
在這些方法中,張正友標定法因其簡便、高精度和廣泛的適用性而備受推崇。它利用雙平面棋盤格結(jié)構(gòu)作為標定物,通過觀察棋盤格在不同視角下的圖像,可以計算出相機的內(nèi)外參數(shù)。克服了傳統(tǒng)方法需要高精度標定物的缺點,并提高了自標定的精度。張氏標定法的主要貢獻在于提出了計算相機參數(shù)優(yōu)化初值的方法,成為計算機視覺領(lǐng)域廣泛應(yīng)用的標定方法之一。
張正友標定法的整體流程如下:
1. 制作標定板并從不同角度(平移、旋轉(zhuǎn))拍攝若干張圖像(10-20張)。
2. 檢測圖像中的特征點。
3. 求解理想無畸變情況下的內(nèi)參、外參。
4. 使用最小二乘法求出實際的徑向畸變參數(shù)。
5. 使用極大似然法優(yōu)化估計,結(jié)合內(nèi)參、外參、畸變參數(shù),提升估計精度。
6. 得到實際的內(nèi)參、外參、畸變參數(shù)。
相機標定是自動駕駛系統(tǒng)中不可或缺的一環(huán),它直接影響到系統(tǒng)的感知能力和決策準確性。通過深入理解和掌握相機標定的技術(shù)要點,我們可以為自動駕駛車輛提供更加準確和可靠的視覺感知能力,推動自動駕駛技術(shù)的發(fā)展和應(yīng)用。
作者介紹
鄭工
康謀科技高級自動駕駛技術(shù)研發(fā)工程師,擁有超過5年的汽車電子和自動駕駛數(shù)據(jù)分析經(jīng)驗,專精于高精度傳感器數(shù)據(jù)的獲取、整合與優(yōu)化。在數(shù)據(jù)采集技術(shù)方面造詣深厚,尤其在車載網(wǎng)絡(luò)和實時數(shù)采系統(tǒng)上富有實踐成果,設(shè)計并優(yōu)化了多種數(shù)據(jù)采集與傳輸方案。曾多次代表公司參加海外技術(shù)研討會和培訓(xùn)項目,深入了解國際自動駕駛行業(yè)的最新動態(tài)和技術(shù)趨勢,積累了豐富的國際視野。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52773瀏覽量
765221 -
攝像機
+關(guān)注
關(guān)注
3文章
1694瀏覽量
61206 -
相機
+關(guān)注
關(guān)注
4文章
1454瀏覽量
54572 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14259瀏覽量
170115
發(fā)布評論請先 登錄
康謀技術(shù) | 毫米波雷達技術(shù)解析

康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關(guān)鍵技術(shù)

FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
汽車自動駕駛技術(shù)
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
自動駕駛的到來
AI/自動駕駛領(lǐng)域的巔峰會議—國際AI自動駕駛高峰論壇
自動駕駛汽車的定位技術(shù)
2020中國上海國際自動駕駛技術(shù)展覽會
自動駕駛技術(shù)的實現(xiàn)
探討當前自動駕駛測試技術(shù)
康謀新聞丨走進康謀科技——您的自動駕駛解決方案合作伙伴






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論