 多核架構高性能電機控制芯片
多核架構高性能電機控制芯片
電機設計、電機制造、材料、電機控制和傳感器技術等各種技術的進步推動了現代電機的發展。因此,電機的應用范圍越來越廣,特別是在醫療設備、汽車電器和移動機器人等新應用領域。近年來,電機控制技術的進步一直是推動電機技術發展的最重要因素,但由于電機控制相關的高技術壁壘,如電機的電磁原理、信號處理、數字芯片、模擬芯片和功率半導體等,電機控制芯片的發展面臨諸多技術瓶頸, 特別是在實現專用電機控制芯片方面。
許多傳統電機,例如不需要調速的感應電機,可以使用交流電 (AC) 直接驅動,而無需電子控制系統。然而,現代機電系統往往需要調節電機運行,電子控制器已成為電機系統中關鍵且不可或缺的一部分,使電機能夠達到所需的運行條件,如速度、位置、轉向、扭矩和功率。
現代電機控制系統除了需要實現所需的工作狀態外,還需要實現許多附加功能,例如能夠以低能耗、高效率和低噪音實現所需的調節效果,所需的通信模式以及有效保護電機系統的能力。新的要求仍在不斷涌現。
電機控制系統需要各種有源電子設備,包括主控制芯片、預驅動器、功率半導體和傳感器。傳統的電機控制芯片采用單核MCU對控制信號進行處理,通過芯片中存儲的編碼程序實現所需的控制模式,然后根據控制模式的要求輸出控制電壓或電流,最終實現所需的電機運行狀態。
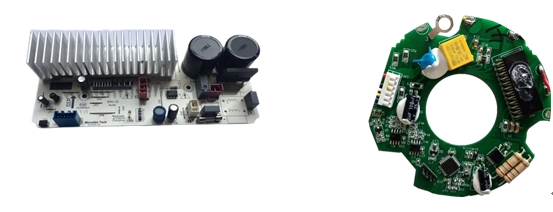
當所需的控制功率較大(例如10Kw或更大)時,控制芯片的尺寸和價格通常不是決定控制系統市場接受度的主要因素。但是,對于電機功率較低的應用,情況就不同了。例如,在數據中心服務器散熱風扇應用中,這是一個很大的市場,單個電機控制芯片包含MCU、前驅動器和低功耗半導體,這使得在一個簡單的印刷電路板上實現整個控制系統成為可能;請參見圖 1 所示的示例。當應用需要幾百到 1 Kw 的功率時,例如空調換氣扇,可以使用帶有 MCU、預驅動器和大功率 MOSFET 的 IPM(智能電源模塊);請參見圖 2 中的示例。在這兩種應用中,控制器的尺寸和成本效益往往決定了產品在市場上的成敗。就數量而言,低功率電機控制器的市場比大功率電機控制器大得多。因此,低功耗電機應用是推動電機控制芯片發展的主要市場,尤其是專用電機控制芯片。
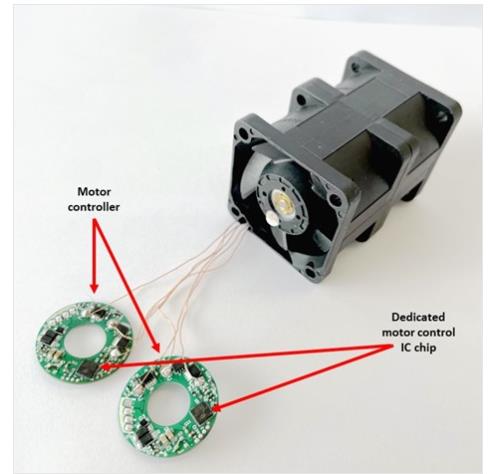
圖 1:具有雙電機和控制器的服務器冷卻風扇

圖2:空調通風機的控制系統
與使用軟件和通用DSP控制電機不同,專用電機控制芯片是專門為電機控制應用開發的。它以固件的形式固化了控制算法,并將所需的高速運算放大器、比較器、LDO 和許多其他外設集成到芯片中。因此,使用專用電機控制芯片的系統,特別是在低功耗系統中,具有較少的電子元件,并且控制系統的PCB看起來更緊湊。
機器人目前正處于顯著的發展階段。現代機器人通常具有 40 多個“自由度”(DOF),這意味著“機器人”使用許多低功率電機和執行器系統1。另一方面,現代汽車通常使用 40 多個電機2,其中大部分是低功率電機。在這兩種情況下,電機系統(包括控制芯片)的尺寸和成本效益都非常苛刻!
無傳感器控制:電機控制技術的重要發展趨勢
許多應用對電機尺寸和可靠性有嚴格的要求。如果在電機中使用磁傳感器(例如霍爾傳感器)來檢測轉子位置,則電機的結構會變得復雜,從而不利于電機的可靠性和壽命。
“無傳感器控制”利用控制器中的“觀察者”算法而不是物理位置傳感器來計算電機的轉子位置,同時根據轉子位置和控制模式(例如FOC模式)調整電機定子繞組中的電流和電壓,以控制電機的狀態。這種控制方法消除了對額外物理角度傳感器的需求,因此可以大大簡化電機結構并提高其可靠性。然而,無傳感器控制需要高性能的觀察器,如滑動膜觀察器、自適應觀察器或基于可擴展卡爾曼濾波算法的觀察器。使用這些觀察器需要大量的計算,并對MCU提出了高性能要求。電機控制技術和半導體硬件的進步導致在電機系統中越來越多地使用無傳感器控制。在適用場景中,無傳感器控制由于對磁鐵的磁化誤差不敏感,往往能比基于傳感器的控制實現更好的控制,并且可以完全避免因安裝而產生的傳感器位置誤差,這種控制方式已成為電機控制技術的重要發展趨勢。許多高性能的驅動模式,如FOC(磁場定向控制),也可以通過無傳感器控制來實現。
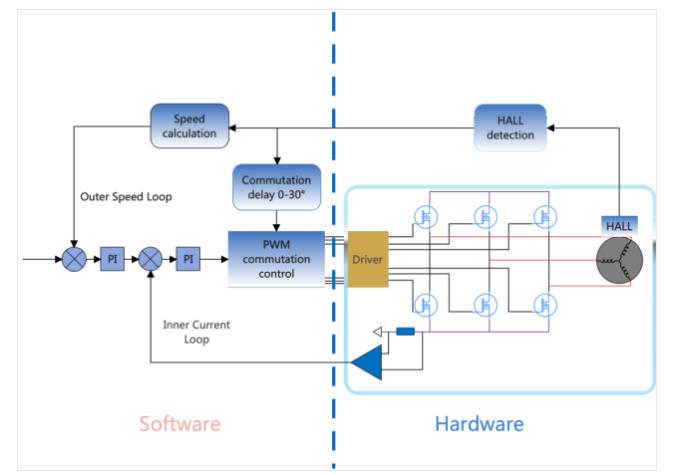
圖3:帶霍爾傳感器的無刷直流電機控制框圖
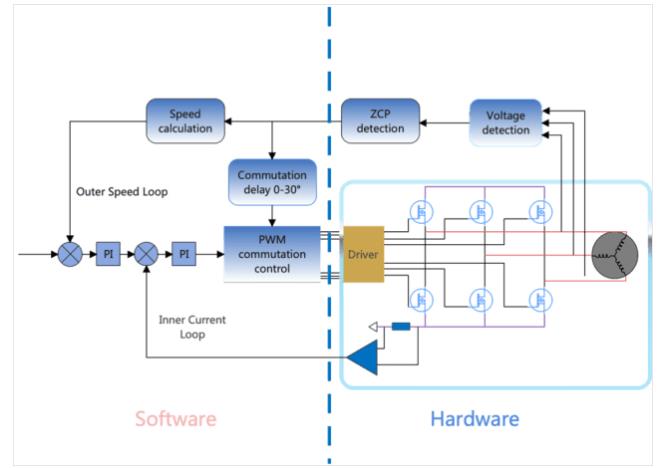
圖4:無傳感器控制模式的無刷直流電機控制框圖
在線識別參數和監測運動健康狀況:新挑戰
具有高精度和魯棒性的“觀察者”是實現無傳感器控制的關鍵部分。這個“觀察器”實際上是一種算法,它使用電機的等效電路參數以及電機運行期間的電壓、電流和反向電動勢等電量信息來計算轉子位置。
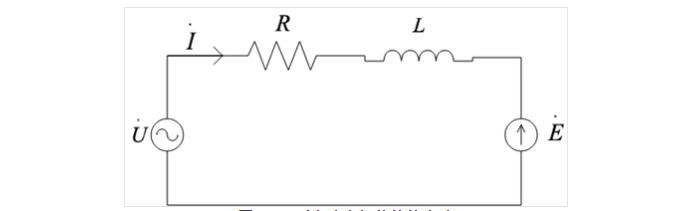
圖5:無刷直流電機的等效電路
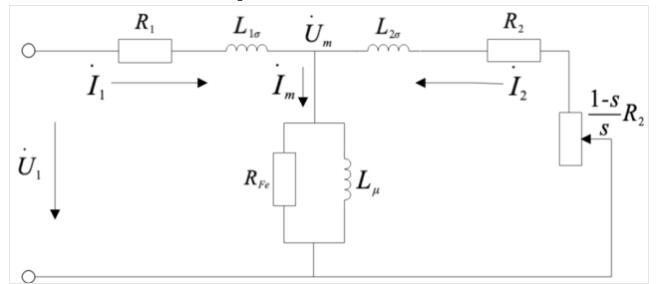
圖6:感應電機的等效電路
Table 1 Effect of temperature variation on a brushless DC motor Ke
表1溫度變化對無刷直流電機的影響K e
| Temperature | 30° | 50° | 70° | Icr 50 (100%) | Icr 70 (100%) |
| Ke (V/(arc/s)) | 0.174 | 0.165 | 0.163 | 5 | 6.2962 |
| R (Ω) | 1.63 | 1.88 | 1.94 | 15.625 | 18.75 |
圖5所示為無刷直流電機的等效電路,該電路由3個參數組成:電機繞組等效電阻R、等效電感L和反電動勢常數K e (K e =E/n)。圖6所示為感應電機的等效電路,由7個參數組成:定子等效電阻R 1和漏感L 1 、轉子等效電阻R 2和漏感L 2 、勵磁效應電阻R Fe和電感X m ,轉子 速度 滑差 。
這些等效參數很難準確測量。例如,在更簡單的無刷直流電機等效電路中,電感L隨轉子位置而變化。不僅如此,所有這些參數還隨著驅動電壓、電機轉速、電機負載和環境溫度的變化而變化。因此,在許多應用中,需要實時在線識別電機參數以實現高性能無傳感器控制。
除了高性能無傳感器電機控制外,高精度參數識別的在線結果還可用于檢測電機健康。 表 1 顯示了電機反電動勢常數 K e 和電阻 R 隨溫度的變化。這種關系可用于模擬電機溫度和參數之間的關系,因此該模型可用于通過無傳感器模式實時檢測電機內部的溫度。這種在線檢測對于許多應用都很重要,因為無需溫度傳感器和將傳感器安裝在電機中,就可以降低電機系統的成本和尺寸。同樣,參數變化包含有關磁體性能和絕緣條件的信息,這些信息也可用于了解電機的健康狀況。
多參數識別模型在計算上非常困難,特別是因為它們往往是高度非線性的。參數越多,識別起來就越困難。當采用無傳感器控制時,在電機運行過程中只能獲得三相電流和電壓的瞬時值,在線參數識別變得非常困難。識別過程是計算密集型的,需要 MCU 的高性能。
隨著工業和家用產品的快速發展,電機控制芯片面臨著越來越多的待處理任務。如果仍然使用傳統單核架構的電機控制芯片來應對這一挑戰,則必須采用先進的芯片工藝來實現具有高密度單元的MCU,使芯片能夠高速處理電機控制模式并執行參數識別等任務的計算。然而,這種處理會使芯片過于昂貴而無法被市場接受。
雙核架構電機控制芯片
單核架構的電機控制芯片只能在串行處理模式下進行多任務計算,越來越難以適應現代產品的挑戰。因此,Fortior Technology 等公司紛紛開發出雙核架構的電機控制芯片。圖 7 顯示了其采用雙核架構的無刷直流電機控制芯片3。該芯片由一個專用內核電機引擎 (ME) 和一個通用內核通用處理器 (GPP) 組成。ME 側重于觀察者和電機控制模式的算法,而 GPP 用于處理通信、保護和閉環控制等通用任務。
芯片運行時,兩個內核相互通信,進行任務分配和協調。這樣,許多操作可以并行處理,多任務處理大大加快。因此,雙核架構能夠實現高性能電機控制芯片,而無需先進的芯片工藝。例如,在查看控制芯片的重要指標——單步FOC計算時間tFS時,Fortior Technology的雙核芯片實現了4.5m s的t FS,這比許多單核架構的高性能電機控制芯片要快得多。
雙核架構也使芯片避免了專用芯片缺乏靈活性的問題,大大拓寬了專用電機控制芯片的應用范圍。
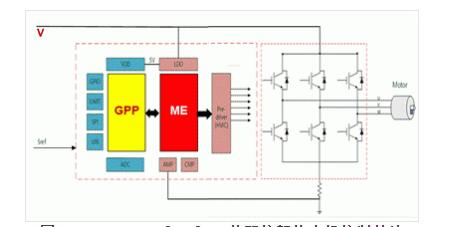
圖 7:Fortior Technology 采用 Dule 核架構的電機控制芯片
采用三核架構的電機控制芯片
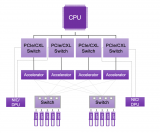
盡管現代電子設備對電機控制的要求越來越嚴格,但雙核架構的專用電機控制芯片在許多應用中都勝任,包括簡單的電機參數識別。但是,如果需要控制更復雜的電磁結構的電機,并實現更精確的參數識別,雙核架構很難滿足控制要求。因此,三核架構自然而然地成為電機控制芯片的新解決方案。
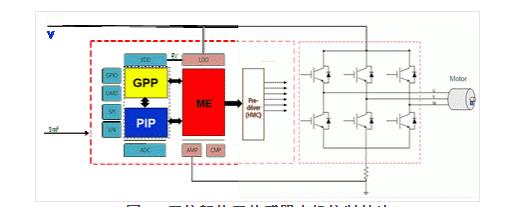
圖 8:采用三核架構的無傳感器電機控制芯片
訪問 fortiortech.com 了解更多高性能電機控制芯片。
結論
家用電器、工業應用等傳統電機應用領域發展迅速;車載電器、人工智能等新的應用領域也不斷涌現。所有這些都對電機系統提出了越來越復雜和苛刻的要求。基于傳統單核架構的電機控制芯片已無法應對新出現的嚴峻挑戰,多核架構的控制芯片應運而生。雙核架構芯片已在許多領域成功應用,并顯示出其獨特的優勢,可以利用無傳感器技術實現高性能的電機控制模式,完成復雜的多任務處理。雙核架構電機控制芯片在性價比方面也具有很強的優勢。當對電機控制芯片有更高的要求時,例如需要識別電機參數,在無傳感器模式下監控電機的健康狀況,三核架構自然成為高性價比電機控制芯片的首選。隨著電機控制任務變得越來越復雜,多核架構將成為電機控制芯片技術的重要發展趨勢。
-
電機控制
+關注
關注
3534文章
1876瀏覽量
268740 -
工業控制
+關注
關注
37文章
1451瀏覽量
85829 -
電機控制芯片
+關注
關注
5文章
59瀏覽量
32426 -
無傳感器控制
+關注
關注
0文章
6瀏覽量
6199
發布評論請先 登錄
相關推薦
構建高性能計算芯片
智芯公司所屬杭州萬高成功推出高性能電機控制MCU芯片
數字信號處理器重新采納多核架構
招聘 高性能計算硬件設計師(基于多核DSP) 1人 (51job網站...
招聘 高性能計算驅動軟件設計師(多核DSP,含ARM+DSP) 1人 ...
NVIDIA火熱招聘GPU高性能計算架構師
從系統架構入手,高性能控制電路設計這三招妥妥滴
如何實現PMSM高性能控制
TI推出最新多核SoC架構,實現5倍性能提升

基于Tricore芯片的AUTOSAR架構下的多核啟動

峰岹科技畢超:現代電機技術面臨挑戰,多核架構電機控制芯片具有高性價比







 工商網監
工商網監
評論