 基于國產FPGA的運動控制加速卡
基于國產FPGA的運動控制加速卡
現階段,大部分的工業運動控制平臺和數控運動中的控制中心為PC端控制器,通過PC端控制器控制伺服驅動器,從而實現機械系統中一個或多個坐標上的運動以及運動之間的協調,實現精確的位置控制、速度和加速度控制、轉矩和力的控制等。同時,PC端控制器還需要控制其他傳感器或運動單元。這種PC端控制器直接控制上述設備的方案,存在效率低、難以做到指令發送或接收的同步處理、延時較大、采集的數據無法做到準確同步等問題。因此需要簡化PC端控制器的數據通信量、降低指令延遲、提升控制效率,同時需要獲取同步后的數據。中科億海微研制的FPGA運動控制加速卡主要完成PC端與伺服驅動器、相機、壓力及柔性傳感器等模塊之間的數據通信、數據融合與數據監測。FPGA運動控制加速卡將復雜的控制卸載到FPGA中實現,簡化了PC端控制器的控制流程,極大地減小了數據鏈路通信時間消耗。同時FPGA將同步后的數據發送到PC處理,使得數據處理流程更合理。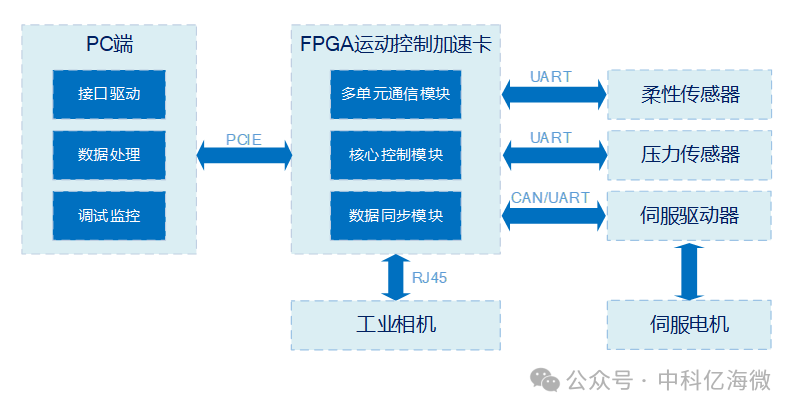
圖 基于FPGA的運動控制加速方案系統構成框圖
基于FPGA的運動控制加速方案主要由兩塊板卡構成:以EQ6HL130為核心的同步采集板、以EQ6HL9為核心的柔性傳感器采集板。
以EQ6HL130為核心的同步采集板控制伺服驅動器,產生驅動控制伺服電機的指令,同時接收其應答指令,將指令解析處理后結果傳輸給PC端控制器作進一步操作;接收柔性傳感器采集器采集的數據,解析后傳輸給控制器;接收壓力傳感器的數據,解析后傳輸給控制器。對所有接收數據打上時間戳,便于后續使用。
以EQ6HL9為核心的柔性傳感器采集板通過AD采集柔性傳感器的數據并組幀傳輸給同步采集板控制;將采集數據轉換為壓力值顯示到顯示屏上。
FPGA運動控制加速卡經測試,PC端控制器方案的系統指令延遲大于50ms。基于FPGA的運動控制加速方案的系統指令延遲小于100us,同時伺服電機應答數據、多傳感器數據、相機數據能做到完全同步,更具使用意義。
-
FPGA
+關注
關注
1629文章
21729瀏覽量
603044 -
驅動器
+關注
關注
52文章
8228瀏覽量
146269 -
控制器
+關注
關注
112文章
16339瀏覽量
177853 -
運動控制
+關注
關注
4文章
579瀏覽量
32860
發布評論請先 登錄
相關推薦

S7t-VG6 VectorPath加速卡的特性和功能
PCIe加速卡在數據中心的應用
AMD 以全球極快的纖薄尺寸電子交易加速卡擴展 Alveo 產品組合,助力廣泛且具性價比的服務器部署

AMD 以全球極快的纖薄尺寸電子交易加速卡擴展 Alveo 產品組合,助力廣泛且具性價比的服務器部署
AMD推出新款纖薄尺寸電子交易加速卡
大模型向邊端側部署,AI加速卡朝高算力、小體積發展
EPSON差分晶振SG3225VEN頻點312.5mhz應用于AI加速卡
基于菲數科技FA728Q加速卡實現低時延LLT應用
借助全新 AMD Alveo? V80 計算加速卡釋放計算能力





 工商網監
工商網監
評論