 ETAS推出Time-Triggered Scheduling (TTS)的確定性調度解決方案
ETAS推出Time-Triggered Scheduling (TTS)的確定性調度解決方案
前言
在2024年2月26日,ETAS推出了名為“Time-Triggered Scheduling (TTS)”的確定性調度解決方案。這項技術旨在改變汽車行業中的軟件工作負載管理方式。隨著汽車行業向軟件定義車輛(SDV)的轉變,軟件組件數量不斷增加,依賴關系變得復雜,底層硬件資源也多樣化。特別是在集成了系統級芯片(SoC)的電子控制單元(ECU)和高級駕駛輔助系統(AD/ADAS)的開發中。
Time-Triggered Scheduling (TTS)
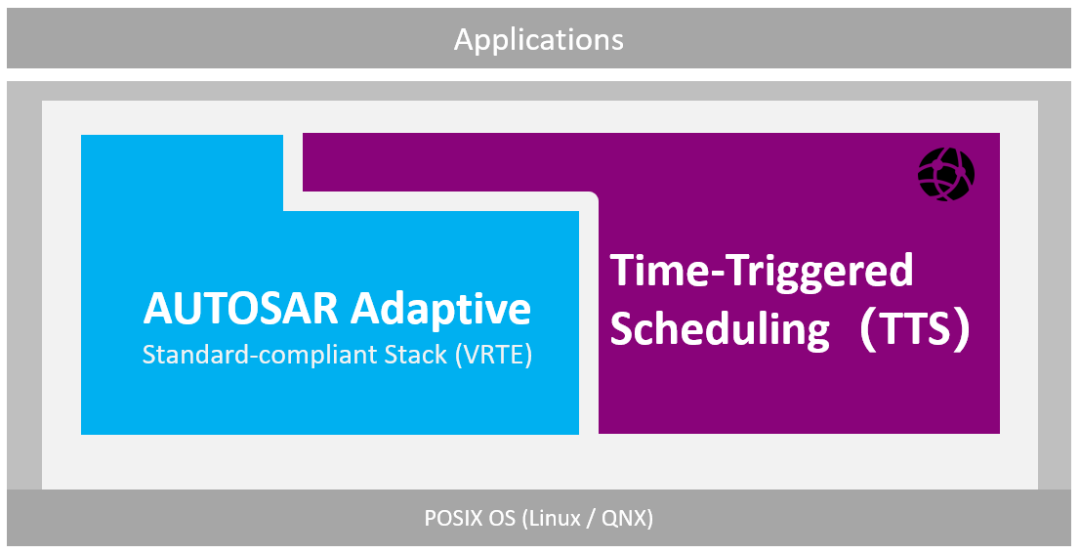
Time-Triggered Scheduling (TTS) 中間件是為多核 SOC 嵌入式系統設計的,它提供了一種時間確定性的調度方法。這種調度方法能夠確保系統的行為和響應時間是可預測的,這對于需要高度精確和實時響應的復雜系統至關重要,通過預先定義任務的執行計劃,TTS能夠有效地管理多核處理器中對共享資源的訪問,從而減少因資源競爭導致的延遲和不確定性,提升系統的實時性能和整體可靠性。這項技術的引入將有助于更好地滿足未來汽車系統對性能、可靠性和安全性的需求。
智能汽車軟件的現狀與挑戰
智能汽車中的應用程序數量和同時運行的任務數取決于車輛的具體軟件架構和硬件能力。目前,智能汽車的軟件架構正逐步向服務導向架構(SOA)演進,這意味著軟件和算法成為車企競爭的核心要素。例如,一些高級的智能汽車平臺可能集成了多達數百個應用程序,同時運行多個任務以支持復雜的功能,如自動駕駛、智能座艙管理、娛樂系統等。
1.1什么是確定性調度?
確定性調度是指在操作系統中,任務或任務鏈按照預定的時間和順序執行,以確保系統行為的可預測性。
雖然Linux系統本身不是一個實時操作系統,但它可以通過實時調度策略來增強任務的確定性執行。這意味著,即使在非實時系統中,也可以通過特定的調度策略來提高系統對任務執行時間的控制。
實時系統與非實時系統的主要區別在于,實時系統能夠提供更強的時間保證和更高的確定性。
時間的確定性:
在嵌入式系統中,時間的確定性是指系統能夠保證在規定的時間內完成特定的任務。這是實時操作系統(RTOS)的一個重要特性,它可以分為硬實時和軟實時兩種類型。
硬實時系統:
硬實時系統要求在嚴格的時間限制內必須完成操作,任何超時都是不允許的。這種類型的系統通常用于關鍵任務,如飛行控制系統或醫療設備,其中任何延遲都可能導致嚴重后果。
軟實時系統:
相比之下,軟實時系統對完成任務的時間要求較為寬松,允許一定程度的延遲。這類系統通常用于多媒體應用等領域,其中一些小的延遲不會導致災難性的后果。
基于時間的確定性調度:
軟實時系統可能無法提供同樣的時間保證,但通過實現實時調度策略,可以在一定程度上提高確定性調度的吞吐量。換句話說,確定性調度并不會將Linux轉變為實時系統,但通過實時系統提供的調度機制可以提高Linux中任務執行的時間確定性,從而在特定應用中提升系統的整體性能。
1.2確定性調度的重要性和面臨的挑戰
確定性調度是系統設計中的一種關鍵技術,它通過精確控制任務執行的時間和順序,來確保系統的可預測性和穩定性。汽車行業面臨著一系列前所未有的挑戰,這些挑戰包括:
任務執行的可預測性:確定性調度確保系統中的任務能夠按照預定的時間和順序執行,這對于實時系統至關重要,因為它們通常需要在嚴格的時間限制內響應外部事件。
系統穩定性:通過確保任務按照既定的計劃執行,確定性調度有助于維持系統的穩定性,尤其是在軟件迭代和集成過程中,這有助于減少因任務沖突或資源爭用導致的不穩定性。
周期性任務的管理:在AD/ADAS系統中,如傳感器數據采集等周期性任務需要準確而靈活地執行,確定性調度可以協調這些周期性任務,確保它們按時完成。
計算結果的時效性:例如,基于融合后數據的路徑規劃需要在特定時間內完成,確定性調度可以保證這些計算任務及時執行,以滿足系統對時間的嚴格要求。
偶發任務的處理:確定性調度允許系統在不影響核心任務的情況下,及時處理如異常情況等偶發任務。
任務執行順序:在多團隊開發環境中,不同團隊開發的算法任務可能存在依賴關系,確定性調度有助于協調這些任務的執行順序,降低同步和協調的復雜性。
算法復雜度:數據采集、融合、規控等算法不僅復雜,而且更新迭代速度快,通常涉及多個開發團隊。
性能監控:確定性調度提供了一種方案來監控核心任務的執行情況和測量任務的性能,這對于優化系統性能和確保質量標準至關重要。
在信息娛樂系統(IVI)或車身控制系統中,確定性調度同樣重要,因為它協調了如數字信號處理器(DSP)和SoC之間的數據處理任務,確保數據的準確傳輸和處理。
基于SoC的ECU開發要求開發者在保證算法復雜度和迭代速度的同時,還要管理好任務的穩定性、時效性和執行順序,確保系統整體的高性能和可靠性。這需要一套綜合的任務調度和性能監控機制,以適應自動駕駛系統的高安全和實時性要求。
1.3ETASTTS確定性調度如何解決這些問題
確定性調度的范圍涵蓋了多個關鍵領域,以確保復雜系統中任務的準時執行和資源的有效管理。以下是清晰的描述:
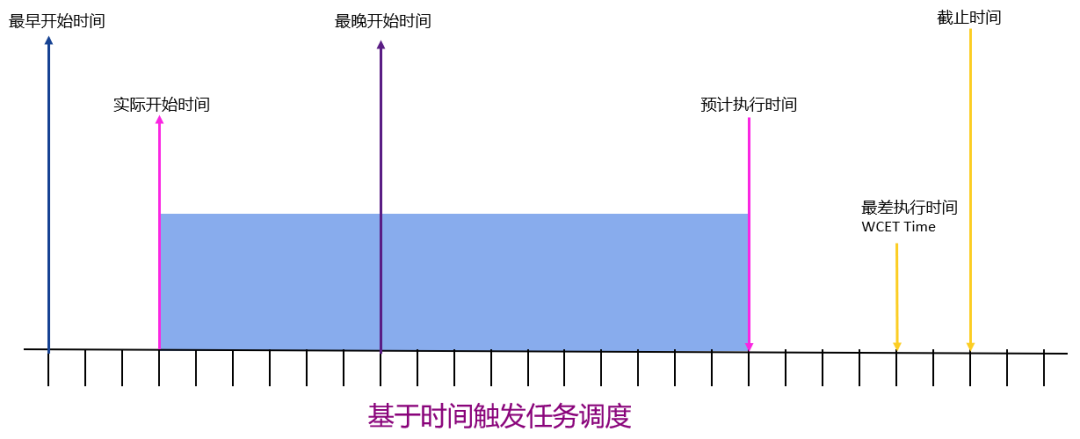
1.基于時間觸發任務調度:
周期任務和浮動任務激活窗口:TTS確保周期性任務在預定的時間窗口內激活,同時為非周期性任務提供靈活的激活機制。
CPU資源(時間片)管理:通過分配固定的時間片,TTS允許任務在指定的CPU資源上運行,優化處理器的使用。
執行時間監控:TTS監控任務的執行時間,確保它們不會超出預定的時間限制。
性能測量:開發者可以選擇性地測量任務的性能,以評估系統的效率和響應速度。
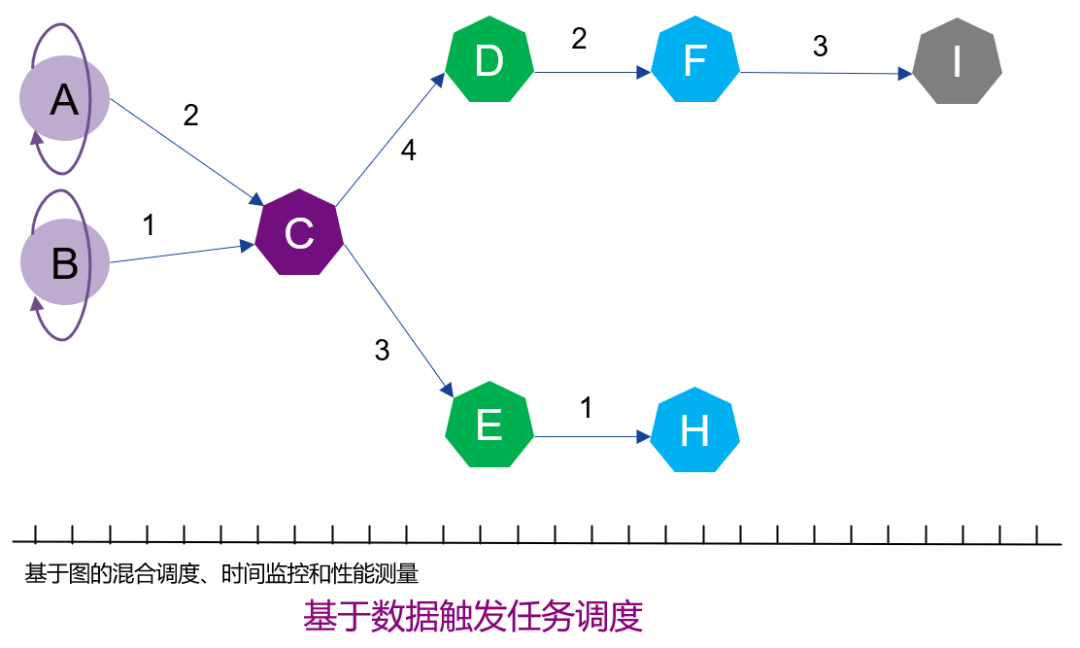
2.基于數據觸發任務、任務鏈調度:
任務依賴鏈和協調同步:TTS管理任務之間的依賴關系,并確保它們按照正確的順序同步執行。
CPU資源和數據內存共享:TTS允許任務共享CPU和內存資源,同時管理這些資源的訪問,防止沖突。
依賴鏈時間監控:TTS監控依賴鏈中各任務的時間,確保整個鏈的流暢運行。
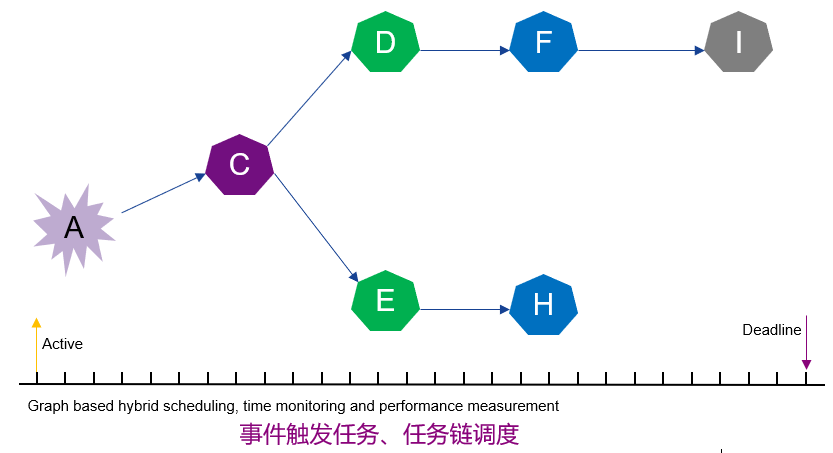
3.基于事件觸發任務、任務鏈調度:
零星事件處理:TTS支持對非周期性事件的及時響應,如傳感器輸入或用戶交互。
事件處理任務鏈:任務鏈中的任務按照事件觸發進行調度,確保系統的反應能力。
CPU最佳利用:通過精確的時間控制,減少系統中的不確定性,確保數據傳輸和處理的及時性。
任務、任務鏈deadline:TTS管理任務的截止時間,確保任務按照既定的性能標準運行。
4.調度表切換:
多模系統:TTS支持在不同模式下切換調度表,適應多變的系統需求,提高了中間件的靈活性。
5.可視化調度工具:
系統資源預測:TTS提供工具,如可視化調度工具,幫助開發者更好地理解和管理任務調度。
6.日志查看過濾工具:
DltViewer:集成了DltViewer,這是一個用于遠程日志查看和分析的工具,增強了用戶的日志管理能力。
ETAS TTS確定性調度通過這些功能的集成,成為了一個高度可配置、可監控和性能優化的中間件解決方案,為軟件定義車輛的開發和運行提供了強有力的支持。
ETAS確定性調度中間件—TTS
Time-Triggered Scheduling (TTS)中間件,專為復雜的多核心系統設計,以確保智能駕駛系統的任務能夠得到有效的全局編排和調度。這種中間件通過時間觸發、數據觸發和事件觸發的機制,為智能駕駛系統提供了一個可靠和確定性的運行環境,為關鍵任務鏈提供了確定性的計算、通信和端到端的時延保證。它支持多種場景和任務組合,能夠為多核SoC的系統提供整體規劃,確保任務的確定性執行。這對于確保系統的穩定性和性能至關重要,特別是在需要高度安全和實時響應的智能駕駛應用中。
Time-Triggered Scheduling (TTS) 確定性調度系統是為高度復雜和實時性要求嚴格的環境設計的,它通過一系列精細的機制確保任務的及時執行和資源的高效管理。
以下是TTS系統關鍵特性的概述:
任務調度:TTS為周期性和非周期性任務提供了精確的激活窗口,確保它們在適當的時間內啟動。
資源分配:通過固定時間片的分配,TTS優化了CPU資源的使用,提高了處理器效率。
執行監控:TTS嚴格監控任務執行時間,防止任何任務超出其預定的時間限制。
性能評估:開發者可以測量任務性能,以評估和優化系統效率。
依賴管理:TTS協調任務之間的依賴關系,確保按正確順序同步執行。
資源共享:TTS管理CPU和內存資源的共享,任務時間片共享,避免資源訪問沖突。
多模式支持:TTS適應不同系統模式下的調度需求,增加了系統的靈活性。
預測與記錄:TTS預測資源需求并進行日志記錄,便于后續的問題追蹤和性能分析。
調度靈活性:TTS支持調度表的動態切換任務調度,提高了調度的靈活性。
可視化工具:TTS提供可視化調度工具和DltViewer,幫助開發者更好地理解和管理任務調度。
ETAS TTS中間件是一個多功能的實時任務調度系統,它通過時間觸發、數據觸發和事件觸發機制,實現了任務的精確調度和性能監控。這個系統不僅提高了任務執行的效率和準確性,還通過其靈活的調度策略,確保了系統的高度可靠性和韌性。
通常情況下,TTS中不管是基于時間觸發的任務調度還是基于數據觸發的任務和任務鏈調度,面向的任務都是周期性任務。
在運行時處理任務動態性的挑戰以及調度的關鍵點,如激活窗口設計和支持多模式系統,通常可以可以概括為時間觸發和非時間觸發。
非時間觸發(如固定優先級或最早截止日期優先):可能會導致所有其他任務的執行發生變化,從而改變整個系統的狀態。這種調度方式在處理突發事件時具有靈活性,但也可能引入不確定性,因為任務的執行受到其他任務和系統狀態的影響。
時間觸發: 保持所有其他任務的執行不變,不會引起系統狀態的變化。這種調度策略按照預定的時間表執行任務,提供了更高的確定性和可預測性。它適用于那些需要嚴格時間控制的應用,如工業控制系統或安全關鍵的應用。時間觸發調度通過固定的激活窗口和對多模式系統的支持,為系統提供了穩定和可靠的任務執行環境。
2.1基于時間觸發的任務調度
TTS的時間觸發任務調度系統,它通過浮動窗口激活周期性任務,并為這些任務分配時間片,確保它們在指定的時間內得到執行。這種調度方式采用動態優先級和FIFO(先進先出)策略,以及對任務執行的嚴格監控,確保關鍵任務在截止時間前被激活并釋放CPU資源給其他任務。此外,系統支持多模式操作,允許在不同的核心上調度同一進程(SWC)的Runnable,以及通過線程池為Runnable分配線程,并提供性能測量接口。
基于時間觸發的任務調度可以實現以下目標:
1.周期任務動態激活窗口:通過精確的激活時間窗口,確保系統中的周期性任務既能按照預定的時間表執行又有一定的靈活性,從而維護系統的穩定性。
2.核心任務資源保障:即使增加新的軟件模塊,也不會影響已有的核心功能模塊的運行狀態。這意味著核心任務的資源分配和執行不會受到其他任務的干擾。
3.任務執行監控:對任務的執行進行監控,確保任務按照預期執行。如果任務執行超出預期,錯誤處理模塊將及時上報異常。
4.性能測量通道:為開發者提供任務性能測量的通道,以便評估任務的執行效率和性能。
5.快速集成:這種調度策略可以快速集成到已開發的軟件系統中,為系統提供更高的可靠性和實時性。
TTS(Time-Triggered Scheduling)的核心功能之一是為POSIX系統提供穩定和可預測的任務執行環境,確保任務的確定性執行,同時提供了靈活性和可擴展性,以適應不同的系統需求和運行模式。以下是其關鍵特性:
浮動窗口激活周期任務:通過動態調整任務的激活窗口,TTS確保即使在系統負載變化的情況下,周期性任務也能夠穩定執行,增強了系統的韌性。
任務分配時間片:每個任務都被分配了一個時間片,確保它在指定的時間內有足夠的CPU資源來執行,從而保證任務的運行時資源。
動態優先級:TTS使用動態優先級機制(例如Linux中的FIFO調度)來保證任務在其時間片內得到執行。
任務執行監控:系統監控任務的執行情況,確保任務在最晚開始時間之前激活,并在截止時間之前釋放CPU資源,以供其他任務使用。
調度單位:TTS將SWC(Process)中的Runnable(Thread)作為調度單位,這些Runnable可以在不同的核心(Core)上進行調度。
線程池:通過線程池為Runnable分配線程,并提供性能測量接口,使開發者能夠監控和評估Runnable的性能。
調度表切換:TTS支持多模式系統,允許根據不同的運行模式切換調度表,這些調度表包含了基于時間觸發、事件觸發和數據觸發的任務。
2.2基于數據觸發的任務鏈調度
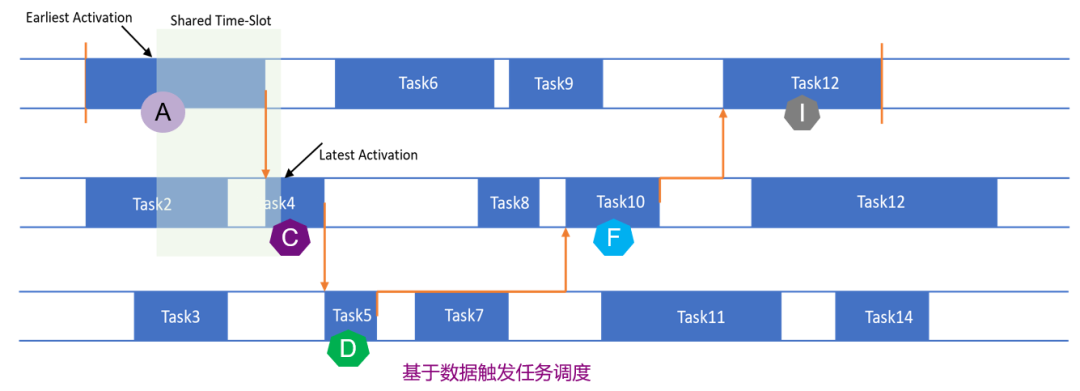
數據觸發任務鏈調度是TTS的核心功能之一,它支持基于圖形依賴關系的任務鏈。在這個系統中,每個Runnable都被分配了時間片,并且它們的運行狀態不僅取決于自身的時間觸發屬性,還受到任務鏈中其他任務的影響。所有Runnable共享時間片,形成一個有向無環圖。系統內部提供共享內容機制,以及接口來保證數據在有依賴關系的Runnable之間傳遞。此外,系統還監控圖的執行時間和性能。
多任務編排示運行意圖
數據觸發任務鏈調度是TTS提供的一種調度策略,它支持基于圖狀依賴關系的任務鏈。這種策略中,每個可運行單元(Runnable)都是周期性任務,并且被分配了時間片,以確保任務鏈中的任務能夠有效地運行并訪問資源。在這個系統中:
每個節點都具有時間觸發屬性,其運行狀態還取決于任務圖中其他任務的運行狀態。
所有Runnable和組內的Runnable共享時間片,以優化資源利用。
為了避免循環依賴和潛在的死鎖,Runnable組成的圖必須是有向無環圖(DAG)。
在同一SoC內部,提供了共享內容機制,通過接口保證有依賴關系的Runnable之間的數據傳遞。通過集成了ETAS RTA-VRTE PIPC(共享內存組件,冰羚的商業版)來保證Runnable之間的數據高效、安全傳輸。
圖中的Runnable(Thread)可以屬于不同的軟件組件SWC(Process)以及不同的處理器核心。
系統提供了圖的執行時間監控和性能測量功能,以確保調度的效率和效果。
此調度策略與基于事件觸發的任務鏈調度相結合,形成跨SoC的綜合調度圖。
這種調度方法為開發者提供了一個清晰的框架,用于管理和優化在復雜的多核環境中的任務執行。
2.3基于事件觸發任務、任務鏈調度
事件觸發任務調度則關注于處理偶發事件,無論是單個任務還是任務鏈。它的目標是確保這些任務在規定時間內完成,而不是簡單地提高響應速度。這個系統也構建了一個有向無環圖,其中的Runnable可以屬于不同的SWC和核心。它還提供了任務鏈中有依賴關系的Task之間的數據緩存機制和數據同步機制。
它的核心功能包括:
支持零星事件處理:可以是單個任務或一系列任務鏈,以靈活應對不同的事件處理需求。
確保任務按時完成:重點是在規定時間內完成任務,而不僅僅是快速響應。
有向無環圖結構:Runnable組成的任務圖必須避免循環依賴,確保任務的順利執行。
事件分類:零星事件可以被定義為用戶級或系統級,以區分事件的來源和重要性。
動態資源管理:CPU資源的動態計算,確保處理零星事件的同時,不會影響其他已有任務的執行。
跨SWC和核心的任務分配:任務鏈中的Runnable可以分布在不同的軟件組件和處理器核心上。
監控和性能測量:對處理事件的任務鏈進行Deadline監控和性能測量,以優化調度效率。
數據緩存和同步:為有依賴關系的Task提供數據緩存和同步機制,確保數據的一致性。
這種調度策略為軟件定義車輛(SDV)中的事件驅動任務提供了一個可靠和高效的框架,特別適用于需要精確時間管理的自動駕駛和高級駕駛輔助系統。
2.31系統事件和用戶事件
在基于事件的調度系統中,當事件被觸發,系統的首要關注點是確定事件的處理時間。這涉及到從事件發生的那一刻起,評估系統上所有CPU核心的空閑時間,以確保是否有足夠的資源來處理該事件。
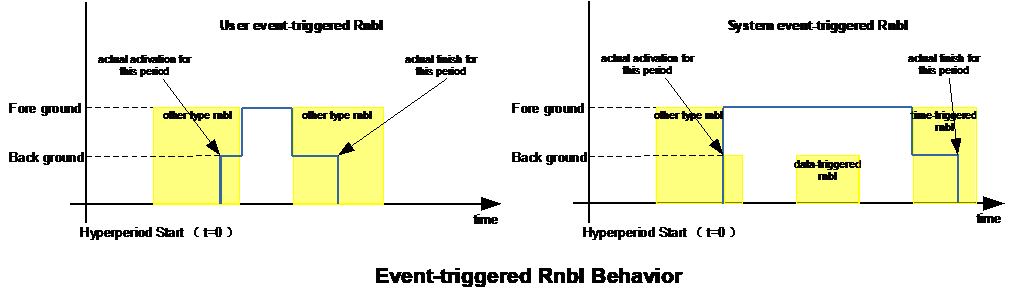
這種調度機制的關鍵特點是它能夠同時響應事件并及時處理,同時保證不會干擾到其他周期性任務的調度。事件被分為兩類:
系統事件:這類事件一旦觸發,會立即搶占其他任務的資源以開始執行,因為它們通常具有更高的優先級。
用戶事件:對于這類事件,系統會先計算所有CPU核心的空閑時間,以判斷是否有足夠的資源來處理事件。只有在資源不足以處理事件時,才會考慮搶占其他任務的資源。
這些事件的處理通常是動態的,它們只有在運行時才會被分配到具體的CPU核心。這種動態分配和資源管理確保了系統能夠靈活地響應各種事件,同時維持其他任務的穩定運行。
2.4調度表切換
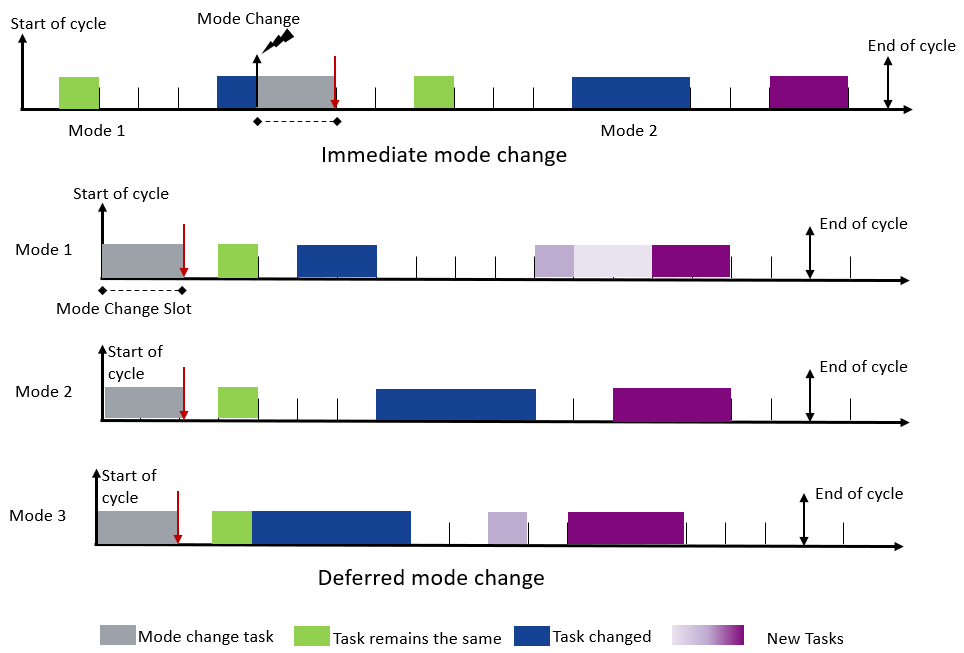
ETAS確定性調度系統能夠根據實時需求靈活切換工作模式。系統可以在緊急情況下迅速轉換到新模式,雖然這可能會帶來一定程度的不確定性和不可預測性。為了安全和可預測性,系統也可以在預定的時間點,如任務周期的開始或結束時,安全地切換到新模式,確保所有組件同步更新狀態。這種設計既滿足了即時響應的需求,也保證了系統的穩定運行。
時間觸發調度系統的模式變更
時間觸發調度系統的模式變更,提供了更細粒度的靈活性和動態行為:
?基本模式變更 - 一組基礎模式,例如停車、巡航控制、城市駕駛等。
?即時變更 - 新模式在觸發后盡可能快地發生。
o系統狀態可能是不確定的。
o缺乏所需的可預測性。
o例如,從巡航控制到駕駛員控制的緊急模式。
?延遲變更 - 在調度周期的結束或開始的預定義點,確保所有節點切換到新模式。
o系統狀態是安全的。
o可預測性。
o例如,從駕駛模式切換到停車模式。
2.5ETAS確定性調度中間件TTS的其它功能
TTS中間件是一個多功能的軟件框架,專為軟件定義車輛而設計。它不僅提供了強大的確定性調度能力,還包含了一系列輔助功能,以支持車輛系統的高效開發和運行。以下是TTS中間件的一些關鍵功能:
日志記錄:具備全面的日志記錄功能,允許用戶應用層軟件記錄事件,便于追蹤和問題診斷。
DltViewer支持:集成了DltViewer,這是一個用于遠程日志查看和分析的工具,增強了用戶的日志管理能力。
數據傳輸與共享:通過IceOryx支持,實現了任務鏈之間的高效數據共享,提升了數據處理的速度和可靠性。
多模式系統支持:能夠根據不同模式切換調度表,適應多變的系統需求,提高了中間件的靈活性和適應性。
AUTOSAR Adaptive集成:與ETAS AUTOSAR Adaptive(VRTE)平臺緊密集成,尤其是與PHM模塊的集成,使得任務執行監控結果能夠上報給PHM處理,從而增強系統的自我監控能力。
配置和調度驗證工具:提供了配置工具和調度驗證工具,幫助用戶確保系統配置的準確性和調度策略的有效性。
eBPF性能分析工具集成:集成了eBPF性能分析工具,這是一種先進的性能分析技術,幫助用戶優化系統性能。
綜上所述,ETAS TTS中間件通過這些功能的集成,成為了一個高度可配置、可監控和性能優化的中間件解決方案,為軟件定義車輛的開發和運行提供了強有力的支持。
2.5.1日志記錄
Log模塊中的Stamp后臺進程是一個關鍵組件,它在用戶發出指令時被喚醒。這個進程負責捕捉和記錄線程的調度狀態、狀態轉換觸發的具體時刻等重要信息,并將這些數據整理成日志文件。
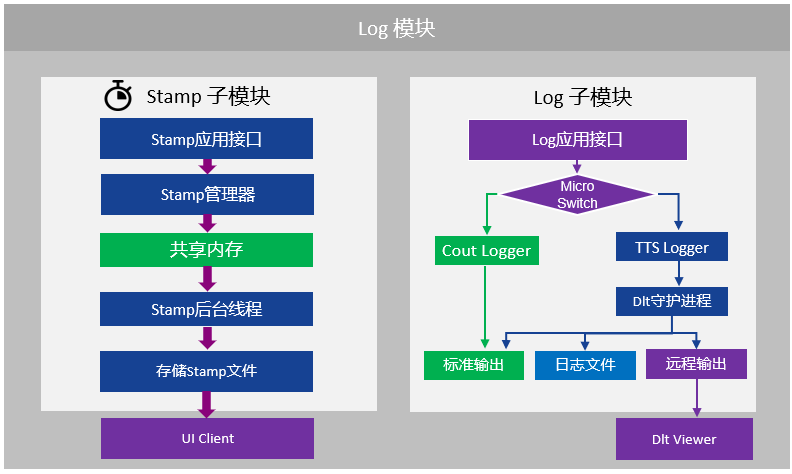
Log模塊內部流程圖
用戶隨后可以通過用戶界面查看這些詳細的日志信息,以便進行系統監控和性能調優。
Runnable實際運行狀態圖
TTS的日志模塊與ETAS AUTOSAR Adaptive(RTA-VRTE)平臺可以無縫集成,特別是與PHM模塊的交互。這樣,任務執行監控的結果可以傳遞給PHM處理,從而增強了系統的自我監控能力。
2.5.2TTS配置工具以及調度分析工具
TTS中間件的配置工具和調度分析工具是為高效和精確的任務管理而設計的。
2.5.2.1TTS UI配置工具
TTS確定性調度中間件配備了一個定制的UI配置工具,該工具具有跨平臺的靈活性,如Ubuntu和Windows操作系統上獨立運行,或者作為Eclipse插件集成到現有的客戶現有的工具鏈中,提供無縫的用戶體驗和增強的工作流程效率。這個工具提供了一個直觀的界面,使用戶能夠輕松配置和管理調度任務。
如下圖所示:在軟件組件SWC(Process)中,您可以設置進程的可執行文件信息,確保正確的程序被調用。對于Runnable(rnbl或Thread),則是配置線程或任務的細節,以便它們能夠按預期執行。而在任務鏈(TaskChain,簡稱grp1)中,通過配置任務的序列和關系,這樣它們就能以正確的順序和方式協同工作。這些配置步驟是確保系統中各個部分能夠高效、準確地協同運行的關鍵。
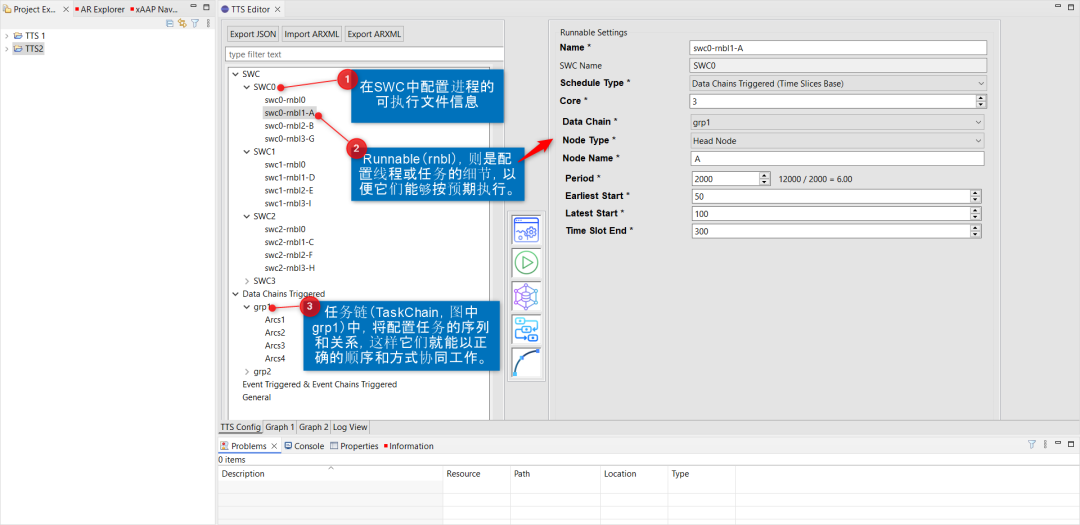
TTS UI配置主界面
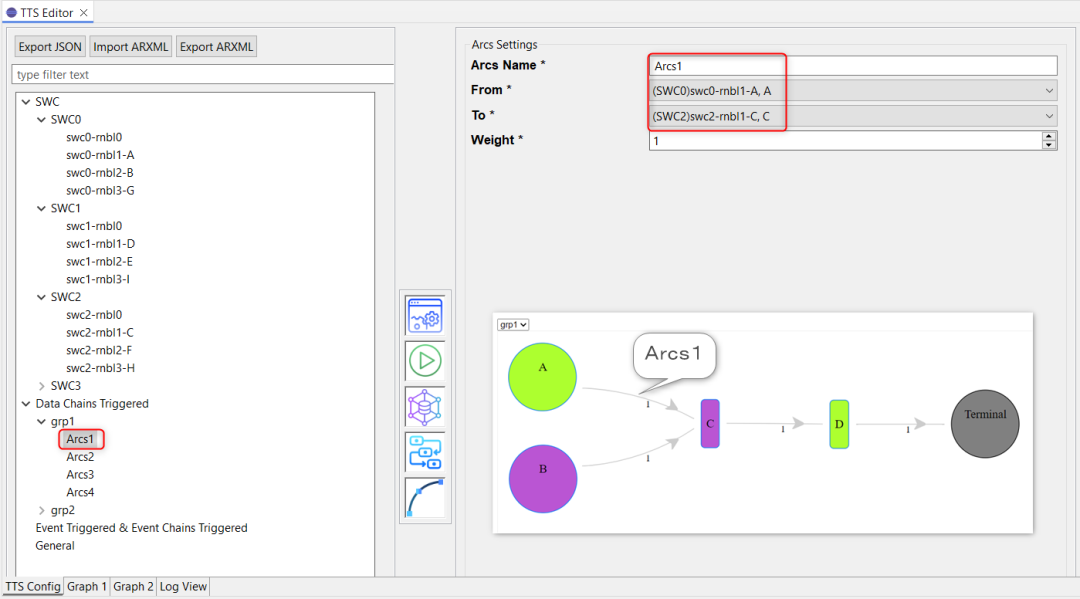
TTS UI配置——Arcs1(任務鏈的一段)
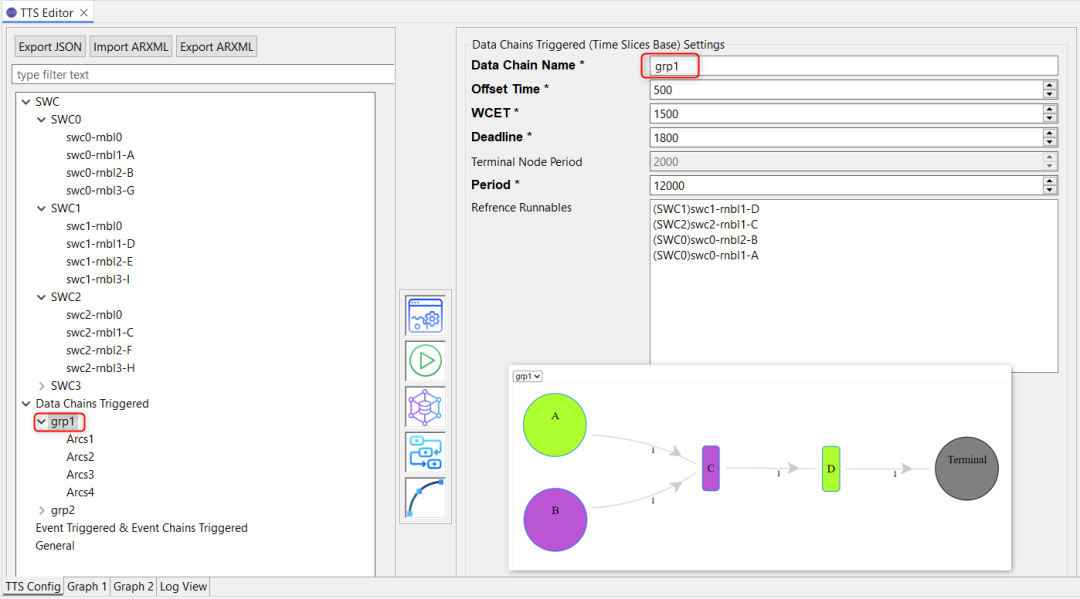
TTS UI配置——任務鏈
TTS中間件允許用戶利用圖形化界面,基于他們所配置的文件,直觀地監控整個系統中Runnable的預期運行狀況。這個功能不僅可以幫助用戶提前識別出任何不合理的任務規劃,還能通過特定命令激活確定性調度模塊來跟蹤和記錄Runnable的實際運行數據,如啟動時間、運行時長以及被中斷的時間等。這些信息隨后會在UI界面中展示,使用戶能夠實時查看并分析任務的實際運行情況,從而優化系統性能和調度策略。
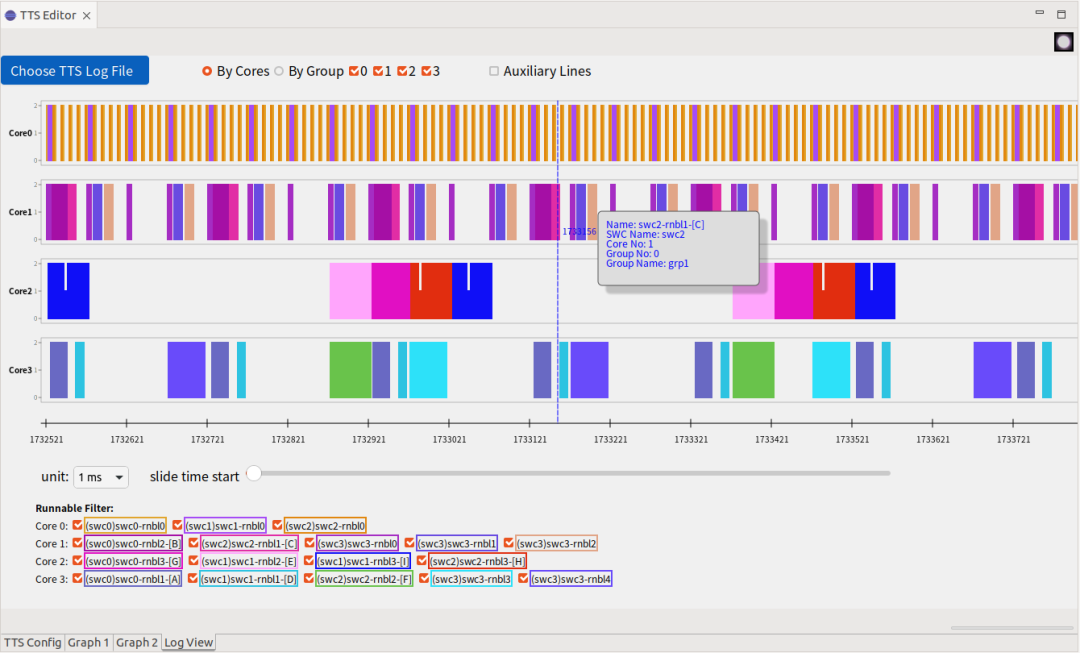
2.5.2.2調度狀態圖形化界面
通過這個功能,用戶可以利用現有的配置文件,以圖形化的方式查看整個系統中Runnable的預期運行狀態。這不僅有助于提前識別和解決任務規劃中可能出現的問題,還允許用戶通過特定命令記錄和監控Runnable的實際運行狀態,包括啟動時間、運行時間和被強占時間等關鍵信息。
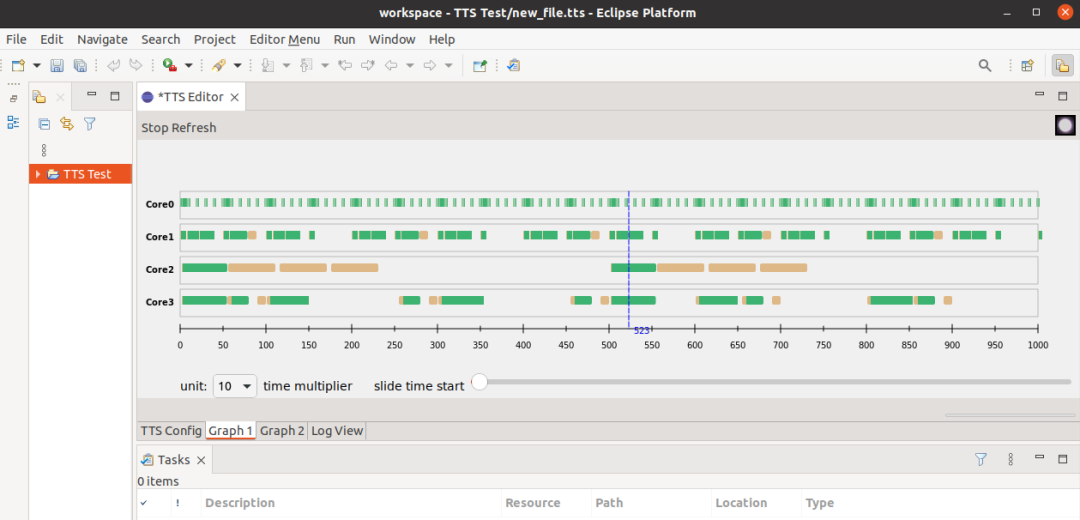
系統被調度的Runnable的預期運行狀態圖
支持通過勾選或鼠標選中Runnable的方式,選擇性地顯示想要觀察的Runnable的執行情況。
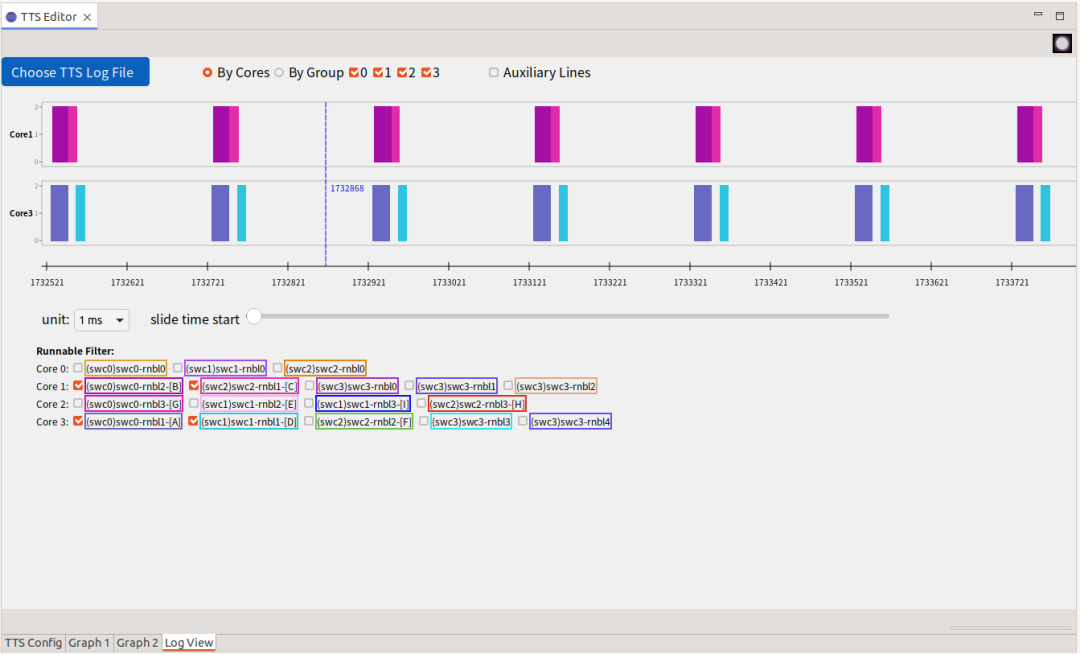
2.5.2.3運行狀態監控和分析
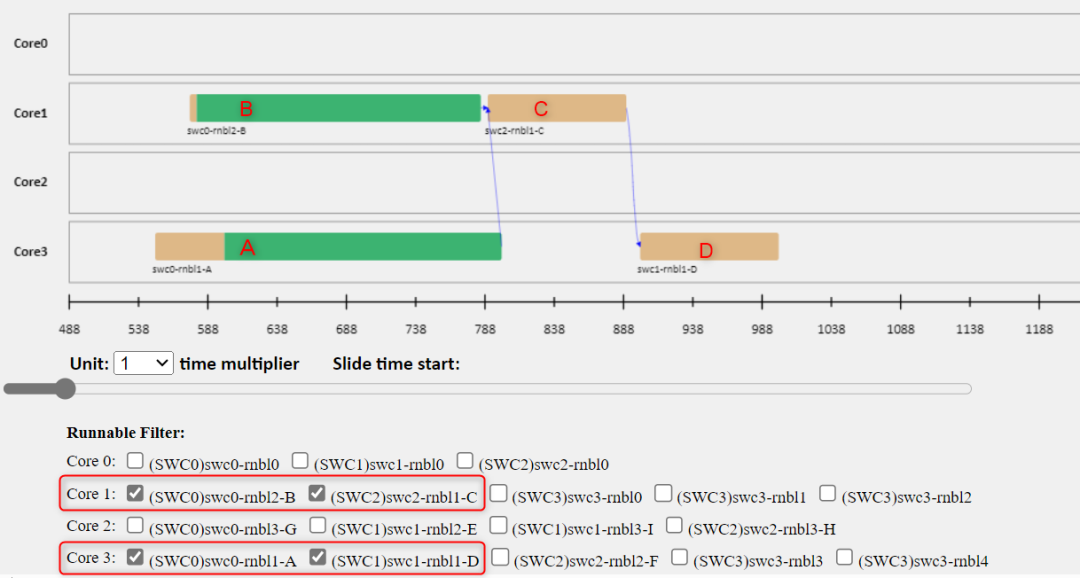
TTS工具也提供了一個圖形化界面,用于監控Runnable的運行狀態。用戶可以通過命令激活確定性調度模塊,記錄所需的運行狀態信息,并通過UI界面進行查看,從而確保任務的實際運行與預期一致。
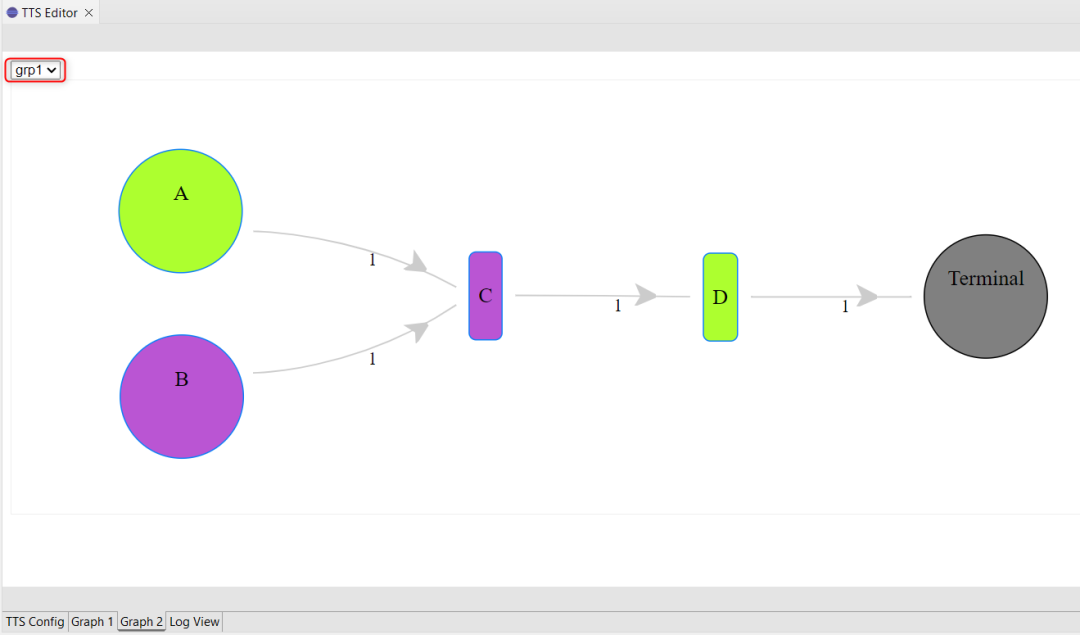
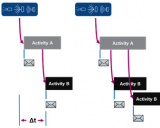
任務鏈
例如:通過勾選Runnable A、B、C、D來顯示任務鏈的執行情況
TTS確定性調度中間件多任務編排示意圖
用戶可以使用命令來啟用確定性調度模塊,以記錄需要記錄的Runnable的運行狀態。這些狀態包括啟動時間、運行時間、被強占時間等等。通過UI界面,用戶可以查看被記錄的Runnable的實際運行狀態,從而監控Task的執行情況。這樣,用戶可以更好地了解系統中各個任務的運行情況。
Runnable實際運行狀態圖
TTS中間件的配置工具和調度分析工具提供了一個全面的解決方案,用于優化任務的配置、監控和分析,確保系統運行的高效性和準確性。這些工具的集成和使用,顯著提高了任務管理的可視化和用戶友好性,同時也增強了系統的可靠性和性能。
2.6 ETAS TTS中間件確定性調度的性能
TTS中間件利用其高精度的確定性調度能力,顯著提升了CPU資源的使用效率。通過這種優化,任務能夠以0.01毫秒的高定時器精度高效執行。在測試環境中,硬件為S32G274RDB2,操作系統為Linux 5.4.69,設置了不同周期的任務鏈和時間觸發任務。這些任務鏈和時間觸發任務的精確調度,確保了任務的及時完成,并最大化了CPU資源的利用。
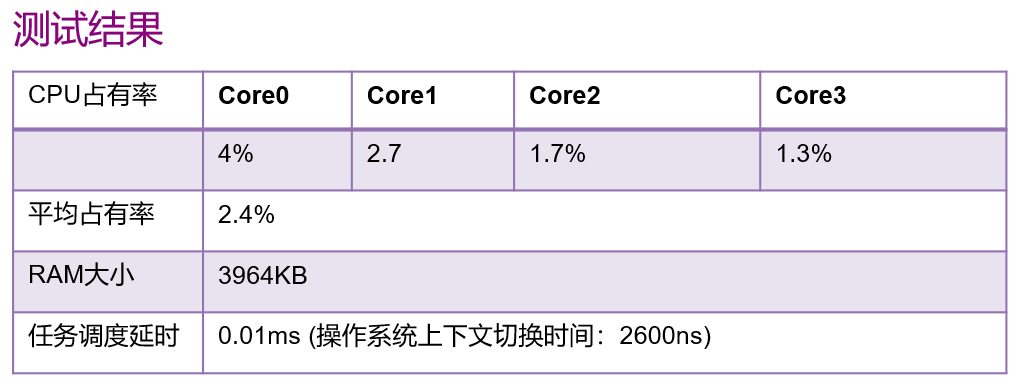
ETAS的TTS解決方案正在與客戶Orin的Drive OS進行集成和測試部署。未來,該解決方案將根據客戶項目的具體需求,擴展對更多硬件環境的支持。此外,該解決方案還提供了硬件定時器支持,使得任務調度可以更加精確,從而有效提升系統性能。
-
SoC芯片
+關注
關注
1文章
610瀏覽量
34905 -
多核處理器
+關注
關注
0文章
109瀏覽量
19908 -
TTS
+關注
關注
0文章
41瀏覽量
10787 -
ADAS系統
+關注
關注
4文章
226瀏覽量
25691
原文標題:ETAS推出TTS時間確定性調度中間件
文章出處:【微信號:ETASChina,微信公眾號:ETAS易特馳】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
LabVIEW實時與FPGA助您快速構建工業高確定性應用
JESD204B轉換器的確定性延遲解密
請問JESD204B中的確定性延遲兩次電源周期之間是怎么理解?
工業以太網確定性調度的設計與實現
EPA確定性通信與測試方法研究
云數據確定性刪除的深層次含義
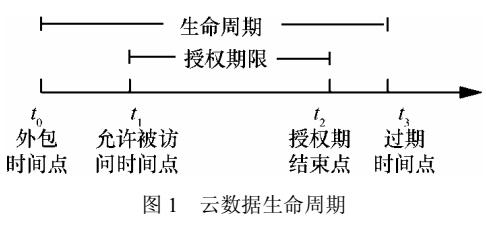
云端數據確定性刪除方法
數字貨幣的確定性有何特殊性,如何去尋找?
什么絡是確定性IP網
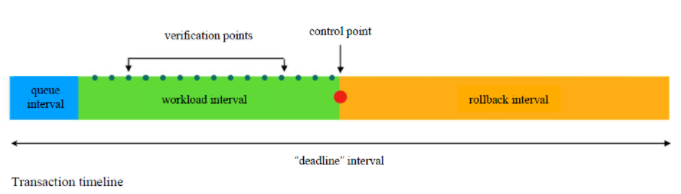
保持任務關鍵的確定性DBMS準時
不確定性時代下的新投資范式
華玉通軟宣布“海鷗”確定性調度中間件(SEAGULL DS)正式商用

什么是嵌入式實時系統的確定性?簡析EDMS中的確定性






 工商網監
工商網監
評論