 速銳得深入解析吉利幾何CAN總線數據通信網絡的拓撲層級框架技術
速銳得深入解析吉利幾何CAN總線數據通信網絡的拓撲層級框架技術
在現代汽車工業中,車輛的電子控制單元(ECU)之間的通信至關重要。這種通信大多通過控制器局域網絡(CAN)總線實現,它是德國BOSCH公司于20世紀80年代初開發的一種串行數據通信協議。隨著技術的不斷進步,吉利旗下的新能源汽車品牌——吉利幾何,也采用了這一技術來實現其車輛內部各個系統之間的高效、可靠的通信。今天,我們就來深入了解一下吉利幾何CAN總線數據通信網絡的拓撲層級框架技術。
在CAN總線網絡中,拓撲層級框架指的是網絡中節點的層次結構,它決定了信息的傳輸路徑和優先級。在吉利幾何的車型中,CAN總線網絡通常采用多層級的結構,以滿足不同系統之間復雜且多樣化的通信需求。
在吉利幾何的CAN總線網絡中,我們可以觀察到幾個主要的拓撲層級框架應用技術:
1、第一層級:這是最高優先級的層級,通常用于關鍵的車輛控制系統,如汽車動力系統管理、制動系統控制、發動機運行及傳感器工作狀態等。在這一層級中,信息傳輸的實時性和可靠性要求極高,因此采用了最快的傳輸速率和最短的數據傳輸延遲。例如,大部分的傳感器采用的是SENT協議,這個協議下,每秒有300萬幀的數據,靈敏度超高,數據傳輸和響應時間最為快速,一般在CAN網絡下是無法獲取到某幀的數據,但是通過高級的微處理器下,采樣頻率均可以達到這個級別,如果需要高靈敏度、高精度的數據,那么SENT協議下,采集的方式就不是不通過CAN網絡協議的了。
- 第二層級:這一層級通常用于車輛的輔助控制系統,車身控制系統等,例如空調系統、車窗、車門控制、雨刮、車燈控制等。雖然這些系統的實時性要求不如第一層級那么高,但仍然需要保證信息的準確傳遞。這些速率基本偏低,在CAN網絡下,大概均為100毫秒,實時性要求不強。在CAN網絡采集數據的界面,基本也是靠后,比如速銳得解碼中控臺原車協議控制按鍵下的一些操作CAN協議指令、LIN協議指令,從速率就可以輕松從CAN排序從后往前匹配破解和采集,這樣的話,效率更高。
- 第三層級:這一層級包含了車輛的舒適性和娛樂系統,如導航系統、音響系統等。這些系統的數據傳輸可以容忍更長的延遲和較低的傳輸速率,但是隨著現在車載以太網的進入,對實時性要求比較高,但是對穩定性的要求又大幅降低,這些并不影響行車安全,大部分車依舊采用LIN協議傳輸、CAN協議傳輸,要想獲得這些數據,做起來并不復雜,只是費人工,在4G/5G網絡技術下,如果出現BUG,遠程升級程序就可以了,當然,之前也有出現過升級司機、黑屏、OTA固件更新錯誤的情況,他們只是需要時間而已,不確定的因素也有網絡因素。
- 第四層級:最低的層級,通常用于車輛的UDS診斷和維護信息傳輸。這一層級的數據流量較小,但對準確性和可靠性的要求依然很高。這類CAN數據的傳輸,基本是停車狀態下的UDS診斷請求,因為行車過程中執行這些操作,往往會對ECU造成干擾。如果是停車模式下的啟動狀態,采用UDS請求,基本上ECU的反饋也會存在延時或者丟包,因為診斷協議下的數據請求一般都不會用在行車途中,采集數據的速率也比較慢,為的就是避免對ECU原本工作的干擾,也有一些ECU不發達的車型,速度稍微快點就報故障碼。

也許在設計吉利幾何的CAN總線網絡時,汽車工程師們會根據每個系統的功能和需求,將其分配到合適的拓撲中,這樣的分層設計不僅保證了關鍵系統的通信不受干擾,還能有效地管理和優化整個網絡的數據流。
在吉利幾何汽車的CAN總線網絡中,采用了一種稱為“星形拓撲”的結構。這種結構以中央控制單元為核心,各個ECU子系統如發動機控制模塊、車身控制模塊等均通過單獨的線路(LIN線、CAN線)與中央控制單元相連。這樣的設計使得數據傳輸更為高效,因為每個子系統都可以直接與中央控制單元通信,而不需要通過其他網關節點轉發信息。
星形拓撲的優勢在于,它能提供更高的數據傳輸速率和更好的故障隔離能力。如果某個子系統出現故障,不會影響到其他系統的正常工作,這對于保障車輛的安全性至關重要。此外,星形拓撲還便于擴展,隨著車輛功能的增加,可以輕松地將新的子系統接入網絡。
然而,星形拓撲也有其局限性,最主要的問題是成本較高。因為每個子系統都需要單獨的連接線路,這無疑增加了材料和布線的復雜性。為了解決這個問題,吉利幾何汽車在設計時采用了模塊化的思想,將功能相關的子系統集成在一起,共享相同的通信線路,這樣既保證了通信的效率,又降低了成本。

除了星形拓撲外,吉利幾何汽車的CAN總線網絡還采用了環形拓撲和總線形拓撲的混合結構。環形拓撲是指每個節點都與兩個相鄰節點相連,形成一個閉環,而總線形拓撲則是所有節點都連接到一條主干線上。這種混合結構的設計旨在提高網絡的冗余性和魯棒性,即使部分線路發生故障,數據仍然可以通過其他路徑傳輸,確保了車輛在極端情況下的可靠運行。
在實際應用中,吉利幾何汽車的CAN總線網絡拓撲技術已經得到了充分地驗證。無論是在日常駕駛還是在復雜的道路條件下,這一技術都能保證車輛各個系統之間的順暢通信,從而提高了整車的性能和用戶體驗。
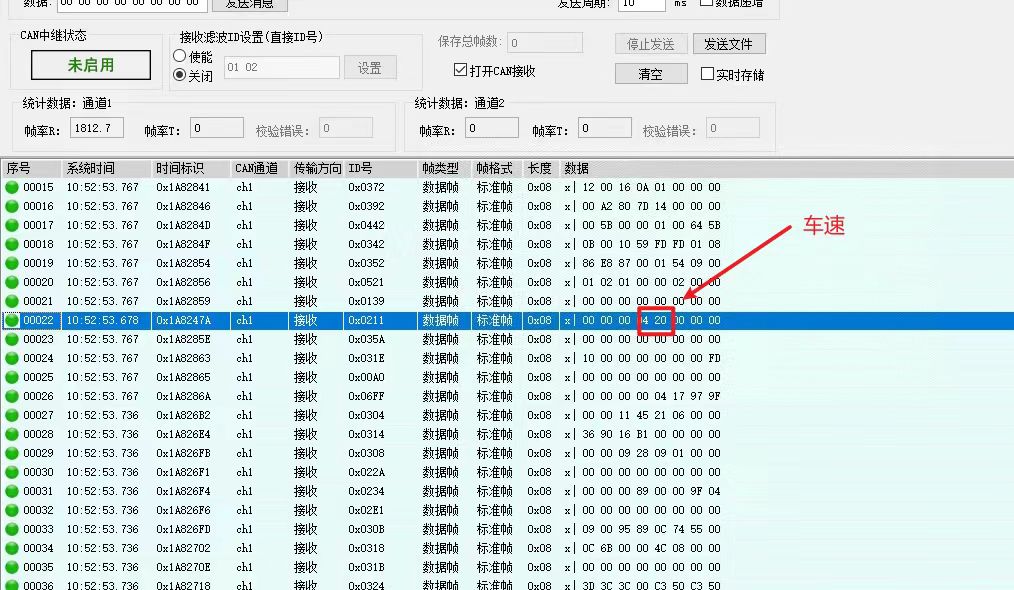
為了確保通信的可靠性,吉利幾何的CAN總線網絡還采用了多種容錯機制。例如,當某個節點發生故障時,網絡能夠自動隔離該節點,防止錯誤信息的傳播。速銳得通過UDS協議,采集了相關電池包的主要數據,其中包括了總電壓、總電流、SOC、DC-DC狀態、絕緣電阻、最高電壓電池子系統號、最高電壓電池單體代號、電池單體電壓最高值、最低電壓電池子系統號、最低電壓電池單體代號、電池單體電壓最低值、最高溫度子系統號、最高溫度探針序號、最高溫度值、最低溫度子系統序號、最低溫度探針序號、最低溫度值、最高報警狀態、SOH、所有電池分組組別下的單體電壓數據、所有探針數據、采集時間、車架號、電池編碼、車輛狀態、充電狀態、車速、累計里程等,并對數據包進行校驗,確保數據的完整性和正確性。
在實車運行下,吉利幾何的CAN總線網絡通過精細的拓撲設計,實現了高效的信息傳輸和處理。吉利幾何CAN總線網絡的拓撲技術是車輛內部通信的關鍵。通過對不同系統的需求進行分層管理,吉利幾何確保了車輛控制的實時性、可靠性和效率。隨著未來汽車電子化程度的不斷提高,我們也能看到,吉利幾何的CAN總線網絡將繼續發展,為智能汽車時代的到來提供堅實的網絡通信技術基礎。
熱愛是純粹的,數據應該也是。
審核編輯 黃宇
-
CAN
+關注
關注
57文章
2744瀏覽量
463621 -
soc
+關注
關注
38文章
4161瀏覽量
218164 -
數據通信
+關注
關注
2文章
431瀏覽量
33755 -
LIN
+關注
關注
4文章
216瀏覽量
40273 -
SOH
+關注
關注
0文章
19瀏覽量
3717
發布評論請先 登錄
相關推薦
RS485和CAN總線的比較分析
OSI七層模型與數據通信的關系
使用CAN總線的注意事項 CAN總線與其他通信協議對比
CAN總線十萬個為什么 | 聊聊幾種常見的CAN網絡拓撲

CAN總線關閉故障的解決方案
速銳得遠程解碼新能源商用車核心BMS電池管理系統CAN數據及應用

為什么CAN總線分支在0.3米內是最可靠的?
速銳得深入解析吉利金剛CAN總線數據在駕校評判系統中技術應用
華為成功舉辦數據通信創新峰會北非站,助力非洲網絡智能化發展

數據通信網關是什么?數據通信網關的功能作用
CAN總線實現高效數據通信的關鍵技術





 工商網監
工商網監
評論