 入圍全球機器人頂會ICRA 2024!毫末在RoboDrive2024挑戰賽嶄露頭角
入圍全球機器人頂會ICRA 2024!毫末在RoboDrive2024挑戰賽嶄露頭角
5月15日, 毫末智行出席全球機器人頂級會議 ICRA 2024,并在 RoboDrive2024 挑戰賽的第三賽道——Occ 語義占用預測任務取得第三名。當日,毫末與其他優勝團隊一道,詳細闡釋了技術方案,分享了如何通過創新技術解決自動駕駛感知中的復雜問題。
2024年5月13日至17日,ICRA 2024 在日本橫濱舉辦。ICRA 匯集了來自世界各地的機器人研究人員、學生和工業合作伙伴,討論最新的創新和突破,強調機器人和自動化在應對全球挑戰中的作用。
ICRA 2024 包括大會報告和主題演講、論文報告會、研討會和教程、論壇、企業合作伙伴的博覽會和展覽、機器人比賽以及各種社交活動。上海人工智能實驗室 OpenMMLab 浦視開源體系團隊主持,聯合新加坡國立大學、卡耐基梅隆大學、新加坡南洋理工大學、上海科技大學等國內外高校,專門聚焦機器感知和自動駕駛的核心問題,共同于會議期間主辦了 RoboDrive2024 挑戰賽。

圖片來源:RoboDrive2024
RoboDrive2024 挑戰賽涵蓋了多個自動駕駛感知中的關鍵難題,共設立了包括 BEV 檢測、鳥瞰圖分割、語義占用預測和深度估計等任務在內的五個賽道。其中,毫末的實例方案獲得了第三賽道——Occ 語義占用預測任務的第三名。
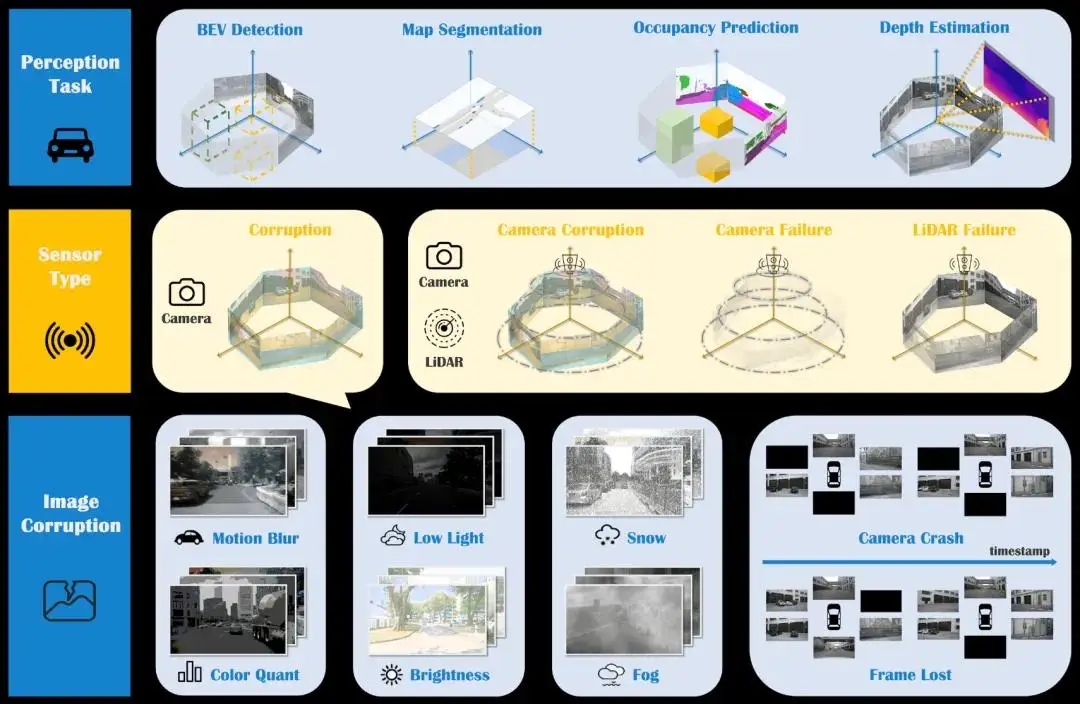
為應對自動駕駛在 3D 場景感知能力上的不同挑戰,RoboDrive2024 挑戰賽專注于評估自動駕駛感知模型在面對常見的損壞和傳感器故障時的魯棒性問題。為此,RoboDrive2024 挑戰賽探討了18種真實世界的損壞類型,這些損壞類型涉及天氣、照明、運動模糊以及由硬件問題導致的數據噪聲和量化誤差。同時,大賽還會評估在攝像頭和激光雷達傳感器發生故障時 3D 場景感知系統的魯棒性,例如丟失攝像頭幀、視角或激光雷達頂部視角。
圖片來源:RoboDrive2024
在歷時近3個月的激烈競爭后,RoboDrive2024 挑戰賽從140支來自全球的隊伍中精選出了15支優勝隊伍,展示了卓越的技術探索和跨學科合作的創造力。RoboDrive2024 挑戰賽不僅是一場技術競賽,更是一次關于未來科技方向的深度對話,代表了產學研領域對于自動駕駛的發展趨勢的最新成果。
毫末參加了 RoboDrive2024 挑戰賽的第三賽道——Occ 語義占用預測任務,其中使用 Nusc-occ 作為訓練集,以及數據增強后的 nusc 驗證集作為測試集,基線模型采用了 Surroundocc。經過評比,毫末的實例方案取得第三名的優異成績。
本屆挑戰賽共吸引了來自全球11個國家、93個機構的共140支隊伍參賽。參賽隊伍涵蓋了由高校、工業界、科研實驗室以及混合組隊等方式組成的共兩百余名參賽者。各參賽隊伍在五個賽道的評測服務器上共計提交了866次預測文件,并將基線 3D 感知模型的性能和魯棒性提升到了全新的水平。
攜手全球智駕頂尖團隊,對自動駕駛技術未來發展的深刻洞察,毫末將持續以技術創新為基點,不斷探索 AI 的更多可能,助力變革出行模式,讓更安全、更便捷、更智能的交通早日到來。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28380瀏覽量
206916
發布評論請先 登錄
相關推薦
EDA精英挑戰賽賽果公布!思爾芯“戰隊”薪火相承斬獲“麒麟杯”

一種創新L型電子墨水屏桌牌嶄露頭角
AMD第三季度CPU出貨量激增,挑戰英特爾市場地位
2024年ICPC與華為挑戰賽冠軍杯圓滿落幕
NVIDIA在ICRA展示最新機器人研究
上海智位機器人榮獲2024全球數字貿易創新大賽機器人與人工智能賽道銅獎
MS39233驅動IC方案在云臺技術領域嶄露頭角
普渡機器人最新產品葫蘆Pro入圍2024 Fast Company 創新設計獎
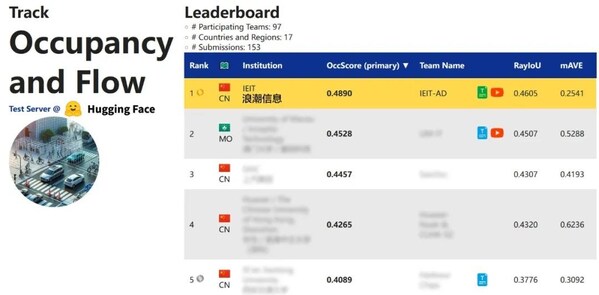
浪潮信息獲CVPR2024自動駕駛挑戰賽"Occupancy& Flow"冠軍
普渡機器人召開2024年新品發布會,以AI+產品矩陣賦能千行百業
人形機器人場景應用全解析,2024睿抗 AI ROBOT創新挑戰賽火熱報名中!
靈途科技看2024 CES:“登堂入室”的機器人與科技新基建
海默機器人:回顧2023,展望2024







 工商網監
工商網監
評論